一种无人机空中回收装置及方法
文献发布时间:2023-06-19 09:26:02
技术领域
本申请属于无人机空中回收技术领域,特别涉及一种无人机空中回收装置及方法。
背景技术
无人机空中回收是解决无人机集群作业效率的重要技术,通过大型载机空中对小型无人机的发射和回收,能够大幅提升小型无人机的使用距离和出动效率。
现有技术中,无人机空中回收方案一般为大型载机通过硬杆或软线拖拽一个回收网或回收机构,小型无人机空中撞网或与机构进行对接,对接后载机将小型无人机拖回机舱内。然而,撞网方式存在撞网后小型无人机姿态不可控的问题,会给载机飞行带来一定干扰甚至危险,机械结构对接方式,需要设计复杂机构对无人机进行固定,容易出现卡滞,且存在卸载困难的问题。
因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
发明内容
本申请的目的是提供了一种无人机空中回收装置及方法,以解决现有技术存在的至少一个问题。
本申请的技术方案是:
本申请的第一个方面提供了一种无人机空中回收装置,包括:
载机;
回收硬杆,所述回收硬杆的中心开设有贯穿的通孔,所述回收硬杆的一端安装在所述载机上;
电磁吸盘,呈片状,所述电磁吸盘沿航向安装在所述回收硬杆的另一端;
柔性拖缆,所述柔性拖缆嵌套在所述回收硬杆的通孔中,其一端与收放机构连接,另一端设置有电磁对接锥套;
无人机,所述无人机的背部表面布置有对接磁吸点,能够与所述电磁吸盘吸合;
对接锥头,所述对接锥头安装在所述无人机的背部,能够与所述电磁对接锥套吸合。
可选地,所述回收硬杆配置有伸缩机构,所述伸缩机构能够控制所述回收硬杆伸出至所述载机外部。
可选地,所述回收硬杆安装在所述载机的尾部。
可选地,所述回收硬杆安装在所述载机的机舱内。
可选地,所述对接磁吸点在所述对接锥头前后的无人机的背部表面对称布置两个。
可选地,所述对接磁吸点为金属小圆盘,其与无人机的背部一体成型。
可选地,所述对接锥头呈L型,通过焊接固定在所述无人机的背部。
本申请的第二个方面提供了一种无人机空中回收方法,基于如上所述的无人机空中回收装置,包括:
步骤一:进入回收阶段后,载机从机内伸出回收硬杆,同时释放柔性拖缆,此时电磁吸盘以及电磁对接锥套均未通电,无磁吸力;
步骤二:无人机自主飞行开展空中对接,控制对接锥头与电磁对接锥套进行对接,完成对接后,载机控制电磁对接锥套通电,通过磁吸力捕获无人机;
步骤三:载机回收柔性拖缆,无人机随柔性拖缆逐渐靠近回收硬杆端部的电磁吸盘;
步骤四:柔性拖缆完全回收至回收硬杆内后,电磁吸盘与位于无人机背部的对接磁吸点接触,此时触发载机接通电磁吸盘电源,产生磁吸力抓牢无人机;
步骤五:载机收缩回收硬杆,将无人机带回载机的机舱内,完成回收过程。
发明至少存在以下有益技术效果:
本申请的无人机空中回收装置,采用电磁吸附原理,通过控制相应部件通断电实现磁性吸附能力,从而在无人机完成对接后对无人机进行“捕获”,利用磁吸力“抓牢”无人机,通过调节电力大小可调整磁吸部件的磁吸能力,从而可以适应不同重量无人机回收需求,可满足不同级别无人机回收要求,还具有姿态稳定可控,结构简单,故障概率低的优点。
附图说明
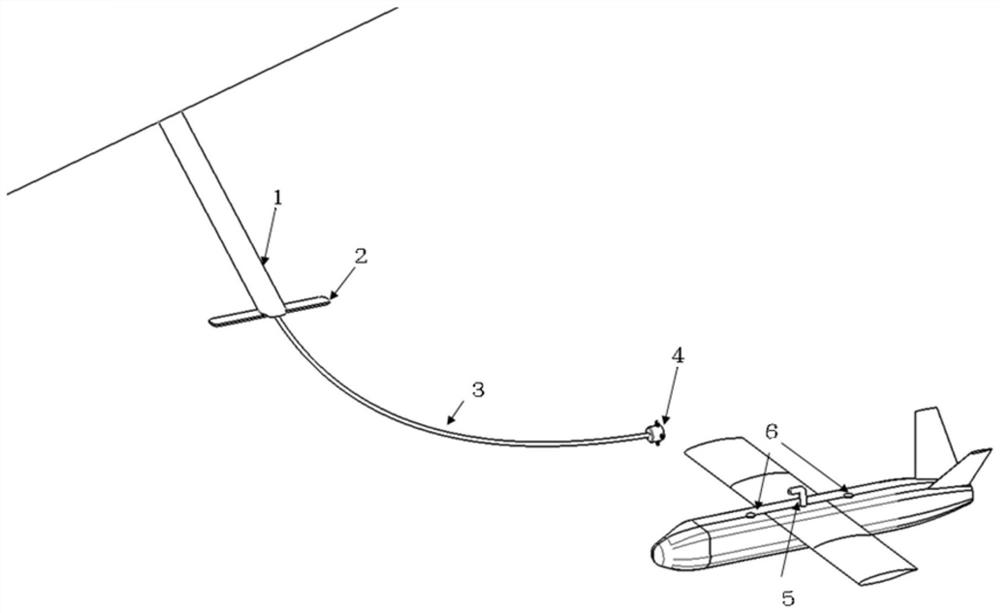
图1是本申请一个实施方式的无人机空中回收装置整体示意图;
图2是本申请一个实施方式的无人机空中回收装置剖视图;
图3是本申请一个实施方式的无人机空中回收装置电磁对接锥套与对接锥头吸合示意图;
图4是本申请一个实施方式的无人机空中回收装置电磁吸盘与对接磁吸点吸合示意图。
其中:
1-回收硬杆;2-电磁吸盘;3-柔性拖缆;4-电磁对接锥套;5-对接锥头;6-对接磁吸点。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本申请一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。下面结合附图对本申请的实施例进行详细说明。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。
下面结合附图1至图4对本申请做进一步详细说明。
本申请的第一个方面无人机空中回收装置,包括:载机、回收硬杆1、电磁吸盘2、柔性拖缆3、无人机以及对接锥头5。
具体的,如图1和图2所示,回收硬杆1为一中空的硬杆,在其中心开设有贯穿的通孔,回收硬杆1的一端安装在载机上;电磁吸盘2为具有一定厚度的片状结构,沿飞行航向布置,且与回收硬杆1的另一端固定连接,电磁吸盘2是具备磁吸力调节功能的磁吸装置,可通过电子开关控制磁吸能力,其自带的线缆埋附于回收硬杆1中,并与载机中的电源装置连接,通电后可产生磁力,断电后磁力消失。
柔性拖缆3嵌套在回收硬杆1的通孔中,其一端与收放机构连接,另一端设置有电磁对接锥套4,通过载机上的收放机构可实现柔性拖缆3的释放与回收,电磁对接锥套4固定连接于柔性拖缆3的端头,电磁对接锥套4具备磁吸功能,可通过电力调节磁吸力大小,柔性拖缆3可为电磁对接锥套4供电,通电时电磁对接锥套4产生磁力,断电后磁力消失,电磁对接锥4为内部有锥形凹槽的伞状部件。
进一步,无人机的背部表面布置有对接磁吸点6,能够与电磁吸盘2吸合;对接锥头5安装在无人机的背部,能够与电磁对接锥套4凹槽配合对接,并在电磁对接锥套4通电后,受磁力吸合。
在本申请的一个实施方式中,回收硬杆1配置有伸缩机构,伸缩机构能够在无人机回收时控制回收硬杆1伸出至载机外部。本实施例中,回收硬杆1安装在载机的尾部或者载机的机舱内。
在本申请的一个实施方式中,对接磁吸点6在对接锥头5前后的无人机的背部表面对称布置两个,在无人机回收对接状态下,能够在电磁吸盘2通电产生磁力的情况下与对接磁吸点6吸合。本实施例中,对接磁吸点6为金属小圆盘结构,优选与无人机的背部一体成型。
在本申请的一个实施方式中,对接锥头5为安装在无人机背部的呈L型的金属结构件,可以通过焊接固定在无人机的背部,用于与载机的电磁对接锥套4对接。
本申请的第二个方面提供了一种无人机空中回收方法,基于如上的无人机空中回收装置,如图3和图4所示,包括:
步骤一:进入回收阶段后,载机从机内伸出回收硬杆1,同时释放柔性拖缆3,此时电磁吸盘2以及电磁对接锥套4均未通电,无磁吸力;
步骤二:无人机自主飞行开展空中对接,控制对接锥头5与电磁对接锥套4进行对接,完成对接后,载机控制电磁对接锥套4通电,通过磁吸力捕获无人机;
步骤三:载机回收柔性拖缆3,无人机随柔性拖缆3逐渐靠近回收硬杆1端部的电磁吸盘2;
步骤四:柔性拖缆3完全回收至回收硬杆1内后,电磁吸盘2与位于无人机背部的对接磁吸点6接触,此时触发载机接通电磁吸盘2电源,产生磁吸力抓牢无人机;
步骤五:载机收缩回收硬杆2,将无人机带回载机的机舱内,完成回收过程。
本申请的无人机空中回收装置及方法,给出了一种无需复杂机械机构的对接方式,同时对无人机回收对接控制精度容忍度较高,载机将无人机拖回舱内后可方便卸载。
本申请的无人机空中回收装置及方法,采用电磁吸附原理,通过控制相应部件通断电实现磁性吸附能力,从而在无人机完成对接后对无人机进行“捕获”,利用磁吸力“抓牢”无人机,通过调节电力大小可调整磁吸部件的磁吸能力,从而可以适应不同重量无人机回收需求,可满足不同级别无人机回收要求。本申请与撞网回收相比具有姿态稳定可控的优点,与机械锁死机构相比,具有结构简单,故障概率低等优点。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。