一种空飘物自动分离装置及空飘物
文献发布时间:2023-06-19 10:52:42
技术领域
本发明属于高空空飘物领域,更具体的说涉及一种空飘物自动分离装置。
背景技术
空飘物(如探空气球、气球靶标、浮空平台等)通常是由空飘气球载着物体在空中飘浮,开始放飞时由于地面上的空气密度比较大,而球体内充入气体(氢气、氦气等)的密度又较小,因此气球受到的浮力也较大,上升速度很快。随着海拔的增高空气密度越来越小,导致浮力不断减小渐渐和总体重力相等,最终悬浮在一个特定的高度,此高度空气密度等于球体内的平均密度,也就是说球体内外的密度相等。因此,利用这个原理就可以实现定高悬浮,再加上定时自动分离控制装置,就实现了定时降落,当空飘物到达预定时间、预定高度或者预定区域后,自动分离控制装置完成气球与物体自动分离,使吊载物体降落到地面,或使搭载的物体投放到指定区域;而空飘气球根据需要则有的升空膨胀而自行炸毁,有的自行放气降落到地面,有的作为靶标训练被击毁,有的回收再利用。
目前通常空飘气球或飞艇在放飞时间控制方式上基本分为四种情况:
第一种是采用电池加热熔断吊绳方式,参考专利2007年3月27日《空飘物分离控制装置的制作方法》。工作原理是采用电池作为供电电源,依靠电子定时器触发控制电路,驱动电路使电加热元件发热,从而使与电加热元件相连接的塑料绳受热熔断,实现气球与下挂物体的定时控制自动分离。
第二种是安装电磁阀定时放气方式,参考专利2005-1-1《空飘气球的自动放气装置》。在气球上端设置有放气口,放气口上安装有密封圈和电磁阀,使阀门压紧盖住放气口,整个气囊充满氢气或氦气后密闭不漏气。同时安装有电池、控制电路板和气压传感器,气球到达一定高度时气压传感器发出电子信号触发控制电路,可以控制电磁阀打开,可在预定的高度、时间或加速度条件下自动放气,使得气球自动下降掉到地面。
第三种是采用定时炸弹放气方式。在气球上设置电子定时器、引信以及炸药,放飞前在地面上给电子定时器预置好爆炸的时间,通过定时电路触发引信,给炸药点火实现爆破,在气球上炸出一个大洞,氢气或氦气密度小从炸洞中排出,致使气球失去浮力迅速降落,从而达到控制气球定时飞行的目的。
第四种是无线遥控引爆火工品方式,在气球上设置无线接收器、引信以及炸药,地面人员手持无线发射器,通过无线遥控发射接收方式发送信号触发引信,给炸药点火实现爆破,在气球上炸出一个大洞,氢气或氦气密度小从炸洞中排出,致使气球失去浮力迅速降落,从而达到控制气球定时飞行的目的。
这些方法通常有几个方面的缺点:
一是采用电池作为供电电源低温下性能不可靠。因为高空气温比地面气温低很多,理论上每升高1000米温度降低6℃,空飘气球放飞高度一般在5000米到1万米,相当于高空温度比地面低30℃到60℃,高空气温经常在零下几十度范围。普通电池的标准容量测试条件是20℃,温度每降低一度,其容量就下降近1%~2%,实际上在-10℃时容量只有50%~70%,在-30℃时容量只有30%~50%,这是因为电池的充放电是一个化学反应过程,受温度影响是此化学反应的固有特性,低温下化学反应相当缓慢。因此电池在高空低温环境中不能正常工作,导致控制装置不起作用。即使是锂离子电池也不能处于过低的温度,在过低的温度下电池中的锂发生沉积造成内部短路。简单地说,在低温环境下,并不是锂电池真的没电了,而是锂离子电池中的金属锂会产生沉积现象,不再和物质发生化学反应,从而发生电池内部短路的情况,有电却不能正常释放出来。锂电池在0℃时,其容量会减少20%,当达到-10℃时,容量可能只有一半左右。
二是电子器件在低温环境下也不能正常工作。控制电路上会焊接一些电子器件,尤其是电容等电子器件,电容对温度很敏感,无论是环境温度过高或者过低都会导致容量的大幅下降,可靠性变差,甚至是损坏。
三是由于爆破装置本身就存在着爆炸的危险,火工品在生产、储存、使用、运输上都被国家严格管控,要有专业生产、专车押运、专人使用、专库存放,无疑增大了制作成本和使用成本,并存在很大的安全风险和治安隐患。
四是无线电遥控方式不可行。气球上搭载的无线电接收装置上有很多电子元器件,在低温环境下也不能正常工作。而且当气球高度飞到了5000米到1万米时,由于高空有大风的影响气球往往是沿着斜线往上飞,直线距离远远超过了5000米到1万米,一般地区自然风条件下斜线距离是垂直高度的1.5倍到3倍以上,相当于遥控距离达到了7000米到几万米远,这么远的遥控距离是需要很大的无线电设备,设备重量很大造成气球搭载过重而无法升空,而且国家无线电管理部门对发射功率和频率都有限制,所以无论重量上还是成本上都不适合使用无线电遥控方式。
基于上述存在的问题,急需找到一种安全可靠,便于控制,不受气压、温度环境等影响的空飘物自动分离装置,通过本空飘物自动分离装置来实现空飘物主体(气球、飞艇等)与搭载物进行定时自动分离。
发明内容
本发明的第一目的在于提供一种空飘物自动分离装置,本自动分离装置安全可靠,便于控制,成本低,不受气压温湿度等因素影响,能够实现空飘物主体与搭载物的连接和定时自动分离。
本发明的第二目的在于提供一种空飘物,能够定时实现空飘物主体与搭载物自动分离,且能够对空飘物主体进行回收,节省空飘物制造成本。
本发明技术方案一种空飘物自动分离装置,包括与空飘物主体连接的第一连接件、设置在搭载物上的第二连接件和驱动所述第二连接件与所述第一连接件定时分离的定时分离机构;
所述定时分离机构包括机械定时器和与所述第二连接件连接的执行机构,所述机械定时器驱动所述执行机构带动所述第二连接件做靠近或远离所述第一连接件的移动,实现第二连接件与所述第一连接件连接或定时分离。
优选地,所述第一连接件为一带有插孔的连接板,所述插孔的轴线与所述连接板垂直;
所述第二连接件包括一与所述插孔平行的活动插销,所述活动插销一端与所述第一连接件连接,所述机械定时器驱动所述执行机构带动所述活动插销插入所述插孔并定时脱离所述插孔。
优选地,所述执行机构包括推动所述第二连接件靠近所述第一连接件实现第二连接件与第一连接件连接的转动棘爪和与所述转动棘爪推动方向相反的弹簧片,所述弹簧片一端与所述第二连接件固定,另一端固定安装;
所述转动棘爪包括呈弧形的棘爪和铰接座,所述棘爪一端与所述铰接座铰接,另一端朝向所述机械定时器,所述棘爪的背拱面朝向所述第二连接件并与第二连接件紧贴;所述机械定时器驱动棘爪以铰接部位旋转,作对第二连接件的推动或释放。
优选地,所述机械定时器包括发条盒以及与所述发条盒同轴固定的计时轮和定时手柄,所述计时轮外圆周面朝向所述执行机构,所述计时轮外圆周面上设置有释放槽,所述计时轮的外圆周面和释放槽分别实现将第二连接件向第一连接件压紧或释放。
优选地,所述搭载物包括一固定箱,所述第二连接件和定时分离机构均固定与所述固定箱内,所述固定箱上表面设置有连接孔,所述第一连接件由所述连接孔插入或移出所述固定箱,分别实现与所述第二连接件连接或分离。
一种空飘物,包括空飘物主体和搭载物,所述空飘物主体和所述搭载物通过前述的自动分离装置连接。
优选地,所述搭载物包括一固定箱,所述固定箱上、下表面分别设置有若干吊挂环。
优选地,所述固定箱的下表面的吊挂环上至少吊挂有配重和定位器,所述固定箱的上表面的吊挂环上吊挂有小气球,所述小气球内充入空气;所述空飘物主体上设置有充气管一,所述充气管一上设置有绑扎带,所述绑扎带与第一连接件连接。
优选地,所述固定箱的下表面的吊挂环上至少吊挂有配重和定位器,所述空飘物主体上设置有始终开口的充气管二、第一拉绳和第二拉绳,所述第一拉绳和所述第二拉绳分别设置在空飘物主体的底部和顶部,所述第一拉绳和所述第二拉绳分别与第一连接件和固定箱上表面的吊挂环连接;
所述第一连接件与第二连接件连接时,所述充气管二的口部始终向下;第一连接件与第二连接件分离后,空飘物主体转动,第二拉绳被拉直,充气管二向上,空飘物主体内气体被排出。
优选地,所述空飘物主体顶部设置有充气管三和顶拉绳,所述充气管三上缠绕有用于封口的绑扎绳,所述绑扎绳一端与固定箱上的吊挂环固定,另一端与第一连接件固定;所述顶拉绳与固定箱下表面上的吊挂环固定,第一连接件与第二连接件连接时,顶拉绳处于放松状态,固定箱被绑扎绳拉紧;
所述空飘物主体底部设置有搭载平台,所述搭载平台底部设置有若干平衡拉绳,所述平衡拉绳另一端对称连接在所述空飘物主体上。
本发明技术方案的一种空飘物自动分离装置的有益效果是:自动分离装置采用机械定时器驱动执行机构动作,实现设置在搭载物上的第二连接件和与空飘物主体连接的第一连接件连接或定时分离。自动分离装置全部采用机械方式,不需要火工品,不存在安全隐患;没有电池和电子器件,不受高空低温高湿影响;不涉及信号控制,不受高度影响;结构安全可靠。
本发明技术方案的一种空飘物的有益效果是:能够实现空飘物主体回收,实现等高悬浮。
附图说明
图1为本发明技术方案的一种空飘物自动分离装置结构示意图,同时也是未分离状态示意图;
图2为本发明技术方案的一种空飘物自动分离装置分离状态示意图;
图3为本发明技术方案一种空飘物自动分离装置中机械定时器结构原理图;
图4为本发明技术方案的一种空飘物实施例一结构示意图;
图5为实施例一的空飘物分离状态示意图;
图6为本发明技术方案的一种空飘物实施例二结构示意图;
图7为实施例二的空飘物分离后回收状态示意图;
图8为本发明技术方案的一种空飘物实施例三结构示意图;
图9为图8中搭载物与空飘物主体连接示意图。
具体实施方式
为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
如图1和图2所示,本发明技术方案一种空飘物自动分离装置,包括与空飘物主体10连接的第一连接件1、设置在搭载物100上的第二连接件2和驱动第二连接件2与第一连接件1定时分离的定时分离机构。通过定时分离机构实现第二连接件2与第一连接件1在连接后在空中漂浮状态下进行定时分离。
如图1和图2所示,本发明技术方案中,定时分离机构包括机械定时器4和与第二连接件2连接的执行机构3。机械定时器4驱动执行机构3带动第二连接件2做靠近或远离第一连接件1的移动,实现第二连接件2与第一连接件1连接或定时分离。机械定时器4是通过弹簧储能、齿轮传动等机械结构自身进行配合与动作,没有电池、电路、电子器件,不受环境温度湿度等影响,分离时不需要信号或电路控制,不受高度限制,不需要进行爆炸物或加热部分,安全环保可靠。
如图1和图2所示,本发明技术方案中,第一连接件1为一带有插孔11的连接板,插孔11的轴线与连接板垂直。在处于空飘状态或工作状态时,第一连接件1一般是竖直向上的,即连接板呈竖直状态,插孔11轴线呈水平状态。空飘物主体10连接在连接板顶部,连接板底部与搭载物100内的第二连接件2连接。连接板需要保持足够的强度和刚度,确保连接可靠,不会出现断裂等问题。
如图1和图2所示,本发明技术方案中,第二连接件2包括一与插孔平行的活动插销21,活动插销21一端与第一连接件1连接,机械定时器4驱动执行机构3带动活动插销21插入插孔11并定时脱离插孔11。安装时,通过手动控制机械定时器4驱动执行机构3带动活动插销21移动,使得活动插销21插入连接板的插孔11内,实现第一连接件1与第二连接件2的连接。然后根据机械定时器4上设定的时间,在设定时间耗尽后,机械定时器4控制执行机构3带动活动插销21向相反的方向运动,带动活动插销21由插孔11内脱离,实现第一连接件1与第二连接件2的分离,即实现了空飘物自动分离装置自动分离。
如图1和图2所示,本发明技术方案中,执行机构3包括推动第二连接件2靠近第一连接件1实现第二连接件2与第一连接件1连接的转动棘爪31和与转动棘爪31推动方向相反的弹簧片32。弹簧片32一端与第二连接件2固定,另一端固定安装。执行机构3推动转动棘爪31克服弹簧片32的弹力,将与转动棘爪31接触的第二连接件2向第一连接件1方向推动,当活动插销21插入插孔11内后,第二连接件2即与第一连接件1连接。当活动棘爪31上执行机构3的推动撤除后,弹簧片32复位,向活动棘爪31侧推动第二连接件2,活动插销21由插孔11内脱出,实现了第二连接件2与第一连接件1分离。
如图1和图2所示,本发明技术方案中,转动棘爪31包括呈弧形的棘爪和铰接座311,棘爪一端与铰接座311铰接,棘爪另一端标注有312位置朝向机械定时器4。棘爪的背拱面313朝向第二连接件2并与第二连接件2紧贴。机械定时器4驱动棘爪以铰接部位旋转,作对第二连接件2的推动或释放。即上段描述的弹簧片32克服弹力和复位的过程。
如图1和图2所示,本发明技术方案中,机械定时器4包括发条盒40以及与发条盒40的中心轴402同轴固定的计时轮41和定时手柄403。计时轮41外圆周面44朝向执行机构3。计时轮41的外圆周面11上设置有释放槽42,计时轮41的外圆周面44和释放槽42分别实现将第二连接件2向第一连接件1压紧或释放。如图1所示状态,计时轮41的外圆周面44与转动棘爪31接触状态下,外圆周面44对转动棘爪31施加一个朝向第二连接件2的力,使得第二连接件2与第一连接件1连接。工作时,计时轮41在发条盒40的作用下匀速旋转,计时轮41的外圆周面44的最大长度即定时的最大时长。在计时轮41上的释放槽42旋转至转动棘爪31位置时,转动棘爪31的一端312在弹簧片32的弹力作用下向释放槽42内压入,即转动棘爪31被释放,弹簧片32复位,实现将第二连接件2与第一连接件1分离。
在计时轮41的释放槽42的口部设置圆弧43,有效的避免了转动棘爪31压入或运动出释放槽42时出现振动或被卡住的问题,使得转动棘爪31运动的平稳。
如图1所示状态,计时轮41逆时针旋转,实现定时,释放槽42口部至转动棘爪31的端部312位置之间的劣弧长度即为定时的对应时长。定时后,发条盒40内部机械结构开始工作,计时轮41顺时针方向旋转,旋转至如图2所示状态,转动棘爪31端部进入释放槽42,转动棘爪31被释放,弹簧片32复位,第二连接件2在弹簧片32的复位作用下向左运动,实现活动插销21由插孔11内脱离,即第一连接件1与第二连接件2分离,第一连接件1在空飘物主体10的作用下被向上拉出,随空飘物上升。
如图3所示,为机械定时器4的结构原理图,其结构和工作原理为:首先具有一手动转动的旋转手柄403,通过与发条盒40里面发条固定的中心轴402带动发条401储能,即完成了计时轮41的定时。然后与发条盒40上固定的齿轮404啮合的齿轮组405带动一棘轮406,棘轮406啮合一摆轮407,摆轮407内设置有游丝409,摆轮407内还设置有调节游丝409的快慢针408,通过快慢针408调节游丝运动快慢。本机械定时器4的在发条401储能后,旋转手柄403放松,发条缓慢释放,带动计时轮41和摆轮407旋转,其中摆轮内407内的游丝409储能,对摆轮407具有一个方向的约束力,有效的避免了发条401释放过快的问题,实现了精准计时和定时触发。
如图1所示,本发明技术方案中,搭载物100包括一固定箱5,第二连接件2和定时分离机构均固定与固定箱5内。固定箱5上表面设置有连接孔51,第一连接件1由连接孔51插入或移出固定箱5,分别实现与第二连接件2连接或分离。连接孔51下部连接有导孔53,实现对第一连接件1运动方向的限制,避免其在运动中,或脱离固定箱5中出现偏移,运动轨迹不偏移导致分离不成功的问题。固定箱5的上下表面和侧面上均设置有若干吊挂环52,用于连接配重、定位器等部件。
如图4至图9所示,为本发明技术方案中的一种空飘物的示意图。一种空飘物,包括空飘物主体10和搭载物100,空飘物主体10和搭载物100通过前述的自动分离装置连接。搭载物100包括一固定箱5,固定箱5上、下表面分别设置有若干吊挂环52。空飘物主体10和搭载物100在空中工作一定时间后,通过自动分离装置自动分离,实现对空飘物进行处理,一般的处理方法有搭载物100回收,空飘物主体10继续升空爆炸或回收。
空飘物主体10内填充的是氢气或氦气,密度比空气低的气体,在空飘物主体10和搭载物100分离后,搭载物100在吊挂环52上吊挂的配重101等部件作用下,落回地面进行回收,空飘物主体10在失去搭载物100和配重101的作用下向上运动,在空飘物主体10不断上升过程中,由于高空中空气越来越稀薄,空飘物主体10继续膨胀,直至空飘物主体10被继续撑开,直至爆炸。一般的常见的空飘物(气球)就是用弹性小、温度膨胀系数小的橡胶材料制成,俗称橡皮气球,升空放飞自行爆炸,基本上一次性使用。为避免爆炸后的气球造成垃圾,或部分空飘物的特殊用途,空飘物主体(气球)采用特殊材料制成,价值高,成本高,一次性使用的损失太大,需要进行回收。下面实施例中提供一种较好的回收方式。
一般地空飘物,分为低空定高空飘物和高空定高空飘物。低空定高空飘物可作为示踪体用以探测边界层内气流变化,从而提供局地的风速、风向的日变化;高空定高空飘物可携带探空仪器,用于高空探测等压面上的风向、风速等气流情况和温度、湿度等的变化。定高空飘物是完善气象观测资料的特殊工具之一,是人类研究对流层的重要工具,在气象学的发展中起着重要的作用。它不仅可以用于观测气象资料,也可用于判别现有气象资料的可靠程度,用于雷达、卫星等探测设备的标定等。空飘物上吊挂的仪器仪表对大气进行探测,并将数据保存起来。到达设定时间后空飘物自动分离并升空自爆,吊挂的记录数据设备回到地面后供数据分析。
实施例一:
如图4和图5所示,本技术方案中的一种空飘物,包括空飘物主体10和搭载物100,空飘物主体10和搭载物100通过自动分离装置连接。搭载物100包括一固定箱5,固定箱5上、下表面分别设置有若干吊挂环52。空飘物主体10和搭载物100在空中工作一定时间后,通过自动分离装置自动分离,实现对空飘物进行处理,一般的处理方法有搭载物100回收,空飘物主体10继续升空爆炸。
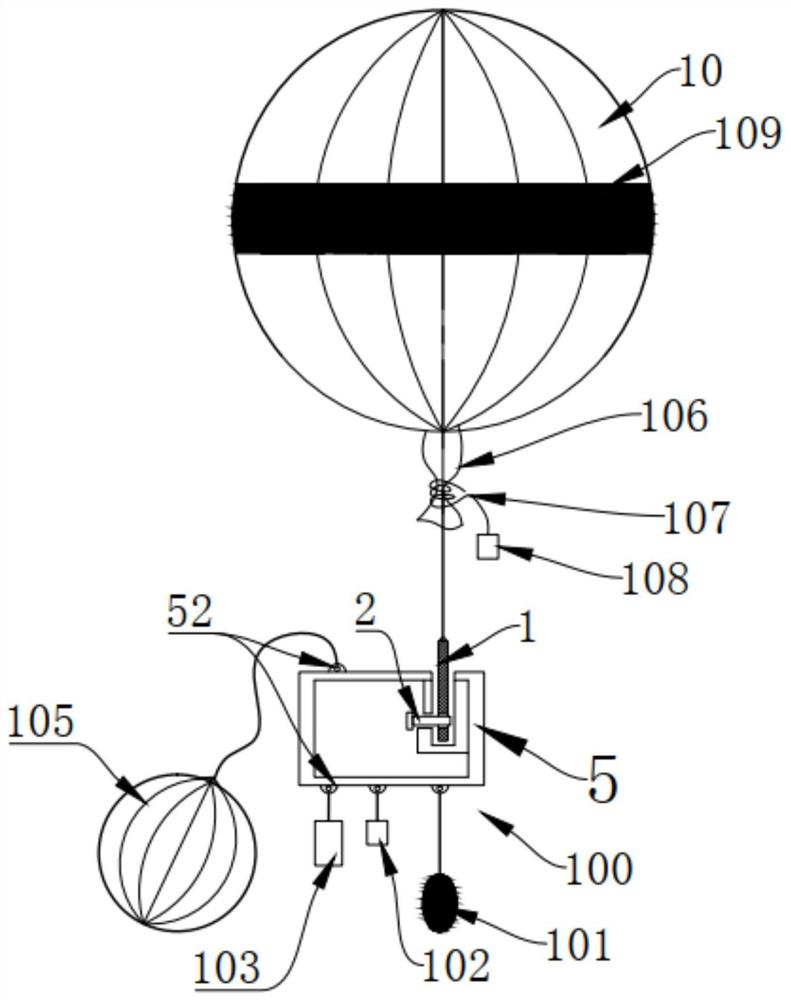
固定箱5的下表面的吊挂环52上至少吊挂有配重101和定位器102,部分空飘物上还要求吊挂烟雾油盒103等等。固定箱5的上表面的吊挂环52上吊挂有小气球105,小气球105内充入空气。空飘物主体10上设置有充气管一106,充气管一106上设置有绑扎带107,绑扎带107扎紧充气管一106,绑扎带107与第一连接件1连接。一般的空飘物主体10上还固定有卫星定位器108,用于对空飘物主体10进行定位,或信息回传。部分空飘物主体10上还包裹有金属膜109,如金属箔等,用于可以反射电磁波供雷达探测。
空飘物正常工作时,如图4所示,空飘物主体10呈漂浮状态,搭载物100因重量较大被空飘物主体10吊挂,小气球105因充入的是空气,在呈向下垂落状态。在自动分离装置将空飘物主体10与搭载物100分离后,如图5所示,空飘物主体10继续升空,最后自行爆炸。而搭载物100在重力作用下下落,同时因小气球105受到空气浮力,有效的避免了搭载物100掉落过快砸伤路人或建筑物等问题,即搭载物100缓慢下落,实现回收,也避免了搭载物100内零部件被损坏的问题。
实施例二:
在实施例一的基础上,如图6和图7所示,改变空飘物主体10的进气方式和空飘物主体10与搭载物100连接的方式(本连接方式不包含第一连接件与第二连接件之间的位置和连接方式),便于实现对空飘物主体10进行回收。固定箱的下表面的吊挂环上至少吊挂有配重和定位器,有配重和定位器等的安装和作用均与实施例一相同或相似,不做赘述。空飘物主体10上设置有始终开口的充气管二201、第一拉绳202和第二拉绳203,第一拉绳202和第二拉绳203分别设置在空飘物主体100的底部和顶部,第一拉绳202和第二拉绳203分别与第一连接件1和固定箱5上表面的吊挂环52连接。第一连接件1与第二连接件2连接时,充气管二201的口部始终向下。第一连接件1与第二连接件2分离后,空飘物主体10转动,第二拉绳203被拉直,如图7所示,充气管二201的口部向上,空飘物主体10内气体被排出。空飘物主体10内气体被排出后,空飘物失去浮力,或浮力减小,空飘物主体10与搭载物100在配重等作用下下落,实现对空飘物主体10与搭载物100回收。充气管二201的口部较小,空飘物主体10内的气体是缓慢排出的,空飘物主体10逐渐缩瘪,导致浮力也慢慢减小,当总体重力大于浮力时就会慢慢坠落,降落过程中缩瘪的空飘物主体10也起到降落伞的作用缓缓下降,不会快速坠落,避免了空飘物主体10和搭载物100及其内的结构部件等出现损坏的问题。
实施例三:
在实施例一的基础上,改变空飘物主体10与搭载物100的连接方式和位置关系(本连接方式不包含第一连接件与第二连接件之间的位置和连接方式),如图8和图9所示,实现在空飘物主体10搭载大型搭载平台301,同时可以在工作完成后对搭载平台301、空飘物主体10与搭载物100进行回收。
如图8和图9所示,空飘物主体10顶部设置有充气管三302和顶拉绳303,充气管三302上缠绕有用于封口的绑扎绳304,绑扎绳304一端与固定箱5上的吊挂环52固定,另一端与第一连接件1固定。绑扎绳304在绑扎充气管三302时,不需要打死结,在确保将充气管三302封闭不漏气即可,同时在于第一连接件1固定端随第一连接件1松脱后,充气管三302被打开。顶拉绳303与固定箱5下表面上的吊挂环固定,第一连接件1与第二连接件2连接时,顶拉绳303处于放松状态,固定箱5被绑扎绳304拉紧。空飘物主体10底部设置有搭载平台301,搭载平台301底部设置有若干平衡拉绳305,平衡拉绳305另一端对称连接在空飘物主体10上。
在空飘物主体10与搭载物100分离后,即绑扎绳304与第一连接件1固定端随第一连接件1松脱,充气管三302被打开缓慢放出空飘物主体10内气体,此时,固定箱5被顶拉绳303固定在空飘物主体10上,随着空飘物主体10气体排出,搭载平台301、空飘物主体10与搭载物100缓慢下降,实现回收。
本发明技术方案在上面结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性改进,或未经改进将发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种空飘物自动分离装置及空飘物
- 一种用于小型航空器和空飘物的监测方法及系统