一种感温装置自动组装生产设备
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及电饭煲感温装置装配生产技术领域,特别涉及一种感温装置自动组装生产设备。
背景技术
电饭煲、电压力锅等电加热炊具因其方便、卫生逐渐被人们所接受,为了防止用户在使用过程中的误操作,现有电饭煲、电压力锅等电加热炊具需要进行无锅检测及测试锅胆底部的温度,以确保在无锅状态下不会进行加热,防止出现干烧状况,保证电器的使用安全,同时保证精准温控。传统的电加热炊具,大多锅底温度检测的功能是集成在感温装置上,感温件内设有温控器,具体在发热盘上设置有供感温装置穿过的通孔,感温装置通过弹性件可伸出或缩进在通孔,通过感温件的缩进或伸出检测锅内胆是否安装到位并检测锅内胆底部的温度。现有的感温装置,其包括底部开口的金属上盖,其内部安装有感温器和ntc线束,底部通过放置内卡件将感温器和ntc线束固定在上盖内,最后上盖和内卡件通过铆接将两者固定连接,完成感温装置的配件生产,然而,现有的感温装置从个连接的安装和连接都是采用人工作业生产的,工作效率低,劳动强度大。
可见,现有技术有待改进与提高。
发明内容
针对上述现有技术中存在的问题,本发明的目的在于提供自动化装配生产的感温装置自动组装生产设备。
为了达到上述目的,本发明采取了以下技术方案:
一种感温装置自动组装生产设备,包括送料机构、第一输送机构、第二输送机构、上料机构、上胶机构、送料翻转装置和铆接装置,所述上料机构用于将工件从所述送料机构转移至第一输送机构,所述上胶机构用于对第一输送机构上的工件进行注胶,所述送料翻转装置衔接于第一输送机构和第二输送机构之间,用于将注胶后的工件翻转倒置在第二输送机构的装配治具上,所述铆接装置用于将装配在装配治具上的感温装置配件进行铆接。
进一步的,所述上料机构包括第一机架、设于第一机架上的吸盘、竖向取料机构和横向推进机构,所述吸盘设于所述竖向取料机构的输出端,所述竖向取料机构设于所述横向推进机构的输出端;通过这样设置,采用吸盘的方式对工件进行上料,上料方式便捷。
进一步的,所述上胶机构包括第一竖向给进机构和设于所述第一竖向给进机构输出端的针筒,所述针筒通过导气管与气泵连接;通过这样设置,采用气泵和针筒实现往工件内注胶,使用方便。
进一步的,所述送料翻转装置包括夹紧机构、直线驱动机构、第一电机和与所述第一电机输出端传动连接的驱动座;所述夹紧机构和直线驱动机构设于所述驱动座上,所述夹紧机构包括一副夹爪,所述夹爪的前部为夹紧部,所述夹爪中部通过固定销轴连接,两所述夹爪的末端通过同一转动件可相对转动连接,所述直线驱动机构的输出端与所述转动件传动连接,所述直线驱动机构可驱动所述转动件直线往复运动使两夹爪绕所述销轴运动,从而使两个夹紧部相对夹紧或打开;通过这样设置,通过直线驱动机构的直线驱动方式可以实现夹紧机构的夹持和松开工件,配合电机驱动驱动座上的夹紧机构翻转,实现工件在一定距离的运送和翻转,结构简单,成本低。
进一步的,所述铆接装置通过第二竖向推进机构安装在所述第一输送机构侧部,所述第二竖向推进机构用于将铆接装置推送至装配治具上端对感温装置配件进行铆接加工;通过这样设置,便于铆接装配与装配治具上端的感温装置配件进行铆接加工。
进一步的,所述铆接装置包括铆接座,可转动设于所述铆接座上的转动件、至少两个滑块、设于滑块上的顶针、导向盘及驱动所述转件的旋转驱动机构,所述铆接座中部设有加工孔,所述铆接座内设有沿所述加工孔径向设置的滑槽,所述滑块可滑动设于所述滑槽内,所述导向盘设有与所述滑块传动连接的导向结构,所述导向结构包括以所述加工孔为中心的向心圆弧轨迹,所述导向盘与所述转动件传动连接,所述转动件相对所述铆接座转动时,可通过所述导向盘带动所述滑块沿所述滑槽向所述加工孔一侧往复移动;将装配治具上端的工件放入加工孔内,通过相对铆接座旋转转动件,即可实现多个顶针同时对工件外周进行铆接加工,仅需通过一个动作即可完成工件铆接加工,装配铆接效率高,使用方便。
进一步的,还包括设于所述第一输送机构侧部的激光刻印装置;通过这样设置,通过对工件进行激光刻印,便于对产品的分类。
进一步的,所述第一输送机构和第二输送机构的输送方向相对预设角度布置;通过这样设置,减少感温装置自动组装生产设备的长度,减少其占用空间。
进一步的,所述第二输送机构为皮带输送装置,所述第二输送机构上排布设有多个所述装配治具;通过这样设置,有效提高感温装置的产品制造效率。
进一步的,所述第二输送机构的输出端设有外端为弧形状的下料板,所述下料板的端部半径自所述第二输送机构一端向另一端逐渐增大;通过这样设置,通过下料板实现自动下料,使用方便。
有益效果:
与现有技术相比,本发明的感温装置自动组装生产设备,第二输送机构的装配治具上可以通过人工或机械工作等方式预先放置内卡件、感温器和ntc线束;感温装置的上盖,从上料、向内部注胶到翻转盖放在装配治具以及最后的铆接加工等各工序,均采用自动化运输和组装生产,工作效率高,减少了工人作业的劳动强度,使用方便。
附图说明
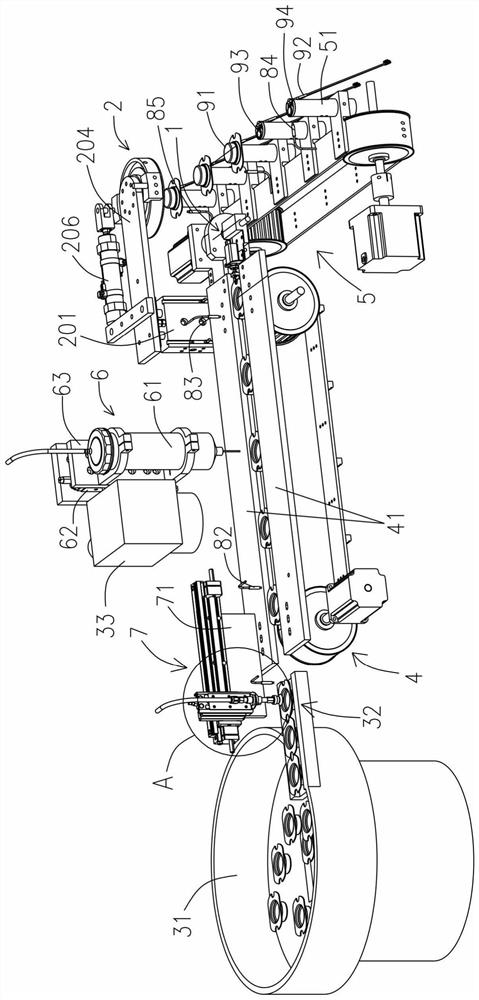
图1为本发明提供的感温装置自动组装生产设备的立体图。
图2为本发明提供的感温装置自动组装生产设备中去除送料机构的立体图。
图3为图1中A区域的局部放大图。
图4为图2中B区域的局部放大图。
图5为本发明提供的感温装置自动组装生产设备中送料翻转装置的示意图。
图6为本发明提供的感温装置自动组装生产设备中送料翻转装置去除电机的爆炸图。
图7为本发明提供的感温装置自动组装生产设备中送料翻转装置的俯视图。
图8为本发明提供的感温装置自动组装生产设备中铆接装置的爆炸图1。
图9为本发明提供的感温装置自动组装生产设备中铆接装置的爆炸图2。
图10为本发明提供的感温装置自动组装生产设备中铆接装置的剖视图。
具体实施方式
本发明提供感温装置自动组装生产设备,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
参见图1至图10,本发明的感温装置自动组装生产设备,包括安装架3、控制模块、送料机构31、设于安装架3上的第一输送机构4、第二输送机构5、上料机构7、上胶机构6、送料翻转装置1和铆接装置2,优选的,所述送料机构31为振动盘,所述上料机构7用于将工件从所述送料机构31转移至第一输送机构4,所述上胶机构6用于对第一输送机构4上的工件进行注胶,所述送料翻转装置1衔接于第一输送机构4和第二输送机构5之间,用于将注胶后的工件翻转倒置在第二输送机构5的装配治具51上,所述铆接装置2用于将装配在装配治具51上的感温装置配件进行铆接。
在一种实施例中,所述上料机构7包括第一机架71、设于第一机架71上的吸盘72、竖向取料机构和横向推进机构,所述吸盘72通过管道与抽真空装置连通,所述吸盘72设于所述竖向取料机构的输出端,所述竖向取料机构设于所述横向推进机构的输出端,具体的,所述横向推进机构包括设于第一机架71上的第一滑轨73、第一滑座74和第一气缸,所述第一滑座74可滑动设于所述第一滑轨73上,所述第一气缸的输出端与所述第一滑座74连接,所述竖向取料机构包括设于第一滑座74上的第二气缸,所述第二气缸的输出端与所述吸盘72连接,所述上料机构7机构工作时,通过第一气缸先横向伸出驱动第一滑座74,使吸盘72移动至送料机构31的物料出口32上方,再而通过第二气缸竖向向下伸出使吸盘72吸起工件后第二气缸竖向向上复位,使吸盘72带动工件上移,再而横向复位后使吸盘72移动至第一输送机构4的上方,然后第二气缸向下移动吸盘72靠近第一输送机构4后释放工件于第一输送机构4上,第二气缸复位使吸盘72上移至原始位置,所述第一气缸和第二气缸与所述控制模块电连接,两者的工作顺序可通过现有的控制程序在时间上的时差顺序进行控制或通过控制模块配合多个限位传感器(如多个光纤传感器、多个接近开关等)在触发的时机上进行先后顺序的工作;通过这样设置,采用吸盘72的方式对工件进行上料,上料方式便捷。
在进一步实施例中,所述第一机架靠近送料机构31的物料出口32处设有第一检测器81,优选的,所述第一检测器81为光纤传感器,所述第一检测器81检测到所述物料出口32有工件时,则反馈信号至控制模块控制第一气缸和第二气缸一起工作进行取料。
在一种实施例中,所述上胶机构6包括第一竖向给进机构和设于所述第一竖向给进机构输出端的针筒61,所述针筒61内装载有导热硅脂,针筒61将导热硅脂挤放在感温装置的上盖91内,便于后续装配后,感温装置的感温器93通过导热硅脂与感温装置的上盖91接触,导热效果更好,使感温器93的探温更精准,具体的,所述第一竖向给进机构包括竖向设置在安装架3上的第三滑轨62、第三滑座63和第三气缸,所述第三滑座63可滑动设于所述第三滑轨62上,所述第三气缸的输出端与所述第三滑座63连接,所述针筒61设于所述第三滑座63上,所述针筒61通过导气管与气泵连接,所述上胶机构6工作时,控制模块控制所述第三气缸伸出使第三滑座63竖向向下动至预设位置,并且针筒61的针头伸入感温装置的上盖91内腔,然后控制模块控制气泵向针筒61内输送定量气体,使针筒61挤出适量导热硅脂后,控制模块控制第三气缸复位使针筒61复位至原始位置,所述第三气缸和气泵的工作顺序可通过现有的控制程序在时间上的时差顺序进行控制或通过控制模块配合多个限位传感器(如多个光纤传感器、多个接近开关等)在触发的时机上进行先后顺序的工作,上述机械部件的工作方式可通过现有的电气部件控制方式进行控制,这些控制方式均属于电气控制领域的常规技术手段,并不是本发明的创新点,本发明的创新点在于采用机械自动化的方式取代传统人工方式对感温装置进行组装生产;通过这样设置,采用气泵和针筒61实现往工件内注胶,使用方便。
在一种实施例中,还包括设于所述第一输送机构4侧部的激光刻印装置33;通过这样设置,通过对工件进行激光刻印,便于对产品的分类。
在进一步实施例中,所述激光刻印装置33设于所述上料机构7和所述上胶机构6之间,所述第一输送机构4和所述第二输送机构5为皮带输送装置,所述第一输送机构4和所述第二输送机构5的电机分别与所述控制模块连接,所述第一输送机构4位于其输送入口处设有第二检测器82,优选的,所述第二检测器82为光纤传感器,所述第二检测器82检测到有工件进入第一输送机构4,侧反馈信号至控制模块控制第一输送机构4运行一段距离后间歇停止,所述一段距离为工件移动至激光刻印装置33的下方,便于激光刻印装置33对停止移动的工件进行加工,然后第一输送机构4继续运行一段距离后间歇停止,使工件移动至上胶机构6下方,便于上胶机构6对停止移动的工件进行加工,所述控制模块控制第一输送机构4的电机间歇暂停的方式可以是采用倒计时或者是通过输入脉冲数设定的距离的方式实现。优选的,所述上料机构7的上料间隔时间可以与第一输送机构4运行一段距离的时间间隔相同,即上料机构7上料的时间点与激光刻印装置33加工和上胶机构6加工的时间点相同,便于上料机构7、激光刻印装置33和上胶机构6在第一输送机构4间歇停止时同时工作,使第一输送机构4可以有规律地间歇停止,有效提高各工序加工的效率,避免第一输送机构4无规律地频繁间歇停止,提高产品可靠性。
参见图1至图7,在一种实施例中,所述送料翻转装置1设于所述第一输送机构4的输出端,其包括夹紧机构11、直线驱动机构12、第一电机13和与所述第一电机13输出端传动连接的驱动座14,所述第一电机13为正反转电机,所述第一电机13可以根据实际需求设置在一定角度内往复翻转,所述一定角度例如是180度,所述直线驱动机构12可以是液压推杆、气动推杆或电动推杆等;所述夹紧机构11和直线驱动机构12设于所述驱动座14上,所述夹紧机构11包括一副夹爪111,所述夹爪111的前部为夹紧部112,所述夹爪111中部通过固定销轴113连接,两所述夹爪111的末端通过同一传动件114可相对转动连接,所述直线驱动机构12的输出端与所述传动件114传动连接,所述直线驱动机构12可驱动所述传动件114直线往复运动使两夹爪111绕所述销轴运动,从而使两个夹紧部112相对夹紧或打开。所述夹爪111的末端设有第一连接孔115,所述传动件114套设于所述第一连接孔115内,所述第一连接孔115内壁与所述传动件114之间留有间隙,便于直线驱动机构12驱动所述传动件114时,便于所述传动件114在第一连接孔115内活动以联动所述夹紧机构11的夹紧或打开;通过这样设置,通过直线驱动机构12的直线驱动方式可以实现夹紧机构11的夹持和松开工件,配合第一电机13驱动驱动座14上的夹紧机构11翻转,实现工件在一定距离的运送和翻转,结构简单,成本低。
在一种实施例中,所述送料翻转装置1复位状态时,所述夹紧机构11朝向所述第一送料机构31,并且夹紧机构11处于张开状态,所述第一送料机构31位于所述夹紧机构11的侧部设有第三检测器83,优选的,所述第三检测器83为光纤传感器,所述第三检测器83检测有工件进入两夹爪111内时,则反馈信号至控制模块控制所述直线驱动机构12驱动所述夹紧机构11夹紧工件,随之控制所述第一电机13驱使所述夹紧机构11翻转90度停留在空中,当第二输送机构5输入端侧部的第四检测器84检测到第二输送机构5上与所述送料翻转装置1对应的装配治具51移动到位时,所述第四检测器84反馈信号至控制模块控制第二输送机构5的电机暂停工作,随之,所述夹紧机构11继续翻转90度,将感温装置的上盖91倒置放置在已经装载有ntc线束92、感温器93和内卡件94的装配治具51上,并且夹紧机构11松开工件,再而,所述第一电机13驱使所述夹紧机构11反向翻转180度复位至原始位置,所述第二输送机构5的电机恢复工作继续运转。所述第一电机13、直线驱动机构12和第二输送机构5的电机的工作顺序可通过现有的控制程序配合第四检测器84在时间上的时差顺序进行控制或通过控制模块配合第四检测器84和多个限位传感器(如多个光纤传感器、多个接近开关等)在触发的时机上进行先后顺序的工作,上述机械部件的工作方式可通过现有的电气部件控制方式进行控制,这些控制方式均属于电气控制领域的常规技术手段,并不是本发明的创新点,本发明的创新点在于采用机械自动化的方式取代传统人工方式对感温装置进行组装生产。
在一种实施例中,所述第一输送机构4的输送带的两侧设有定位板41,两定位板41与输送带之间形成输送工件的输送通道,所述输送通道的宽度与所述工件的宽度相适配,所述第一输送机构4和第二输送机构5的输送方向相对预设角度布置,优选的,所述预设角度为直角,使第一输送机构4和第二输送机构5的呈丁字型布置;通过这样设置,减少感温装置自动组装生产设备的长度,减少其占用空间。优选的,所述第二输送机构5上侧沿其输送方向的表面设有多个所述装配治具51,所述夹紧机构11的翻转轨迹对应第二输送机构5上远离输入端的装配治具51,这样设置的好处在于,便于人工或机械工作在第二输送机构5上输入端的装配治具51预先装配好其他零件后,然后才放置感温装置的上盖91。
参见图5至图7,在一种实施例中,还包括翻板15,所述夹紧机构11和直线驱动机构12通过翻板15安装在所述驱动座14上,所述翻板15设有沿所述直线驱动机构12驱动方向的滑孔151,所述传动件114位于所述滑孔151内,所述直线驱动机构12驱动所述传动件114滑动至滑孔151前端时,所述夹紧机构11处于打开状态,所述直线驱动机构12驱动所述传动件114滑动至滑孔151后端时,所述处于闭合状态;通过这样设置,为所述夹紧机构11和直线驱动机构12提供一个安装位置,便于驱动座14驱动翻板15翻转时,同时通过夹紧机构11带动工件翻转。
在一种实施例中,所述翻板15前侧设有对应所述夹爪111夹口的缺口152,所述缺口152呈U形状,所述翻板15前端位于所述夹紧部112前侧,优选的,所述缺口152内侧呈半圆状,便于与工件配合;通过这样设置,可以避免夹紧机构11夹持工件时与所述翻板15发生干涉,而且,当工件进入缺口152内时,U形状缺口152对工件起到导向作用,便于夹紧机构11更容易夹持到工件。
在一种实施例中,所述夹紧部112的前端内侧设有抓钩116,所述传动件114滑动至滑孔151内端时,两个所述夹紧部112相对夹紧,且两所述抓钩116与缺口152内端形成等边三角形的三个角;通过这样设置,工件夹持于缺口152内端和两抓钩116之间时,夹持固定效果更稳固。
在一种实施例中,还包括连接座16,所述直线驱动机构12通过所述连接座16与所述传动件114传动连接;所述连接座16上设有第一螺孔161,所述传动件114为螺钉,所述传动件114依次穿过所述翻板15的滑孔151、两夹爪111的第一连接孔115与所述第一螺孔161连接;通过这样设置,直线驱动机构12与两夹爪111的连接方式简单,方便生产装配。
在一种实施例中,所述夹紧机构11设有两个,分别设于所述翻板15的上下两侧,两个所述夹紧机构11通过同一传动件114安装在所述翻板15的滑孔151内;通过这样设置,夹紧机构11夹持效果好。
在一种实施例中,所述连接座16包括竖向设置的第一连接部162和连接在第一连接部162下端横向设置的第二连接部163,所述直线驱动机构12的输出端与第一连接部162连接,所述第一螺孔161设于所述第二连接部163上;由于直线驱动机构12的箱体具有一定体积,通过这样设置,可以实现直线驱动机构12与夹爪111在竖直方向的错位连接。
在一种实施例中,所述驱动座14内设有轴孔141,所述第一电机13的输出轴设于所述轴孔141内,所述输出轴设有径向设有第二连接孔,所述驱动座14侧部设有连通所述轴孔141的第三连接孔142,所述输出轴设于所述轴孔141内时,所述第二连接孔与所述第三连接孔142对齐,所述第二连接孔与所述第三连接孔142通过螺钉连接实现所述驱动座14与所述第一电机13的输出轴传动连接;通过这样设置,第一电机13与驱动座14的传动连接方式简单。
在一种实施例中,所述第二连接孔和所述第三连接孔142对应设有两组以上,例如三组;通过这样设置,第一电机13与驱动座14的传动连接更稳固。
在一种实施例中,还包括安装座17,所述安装座17内设有安装孔171,所述第一电机13的输出轴通过轴承安装置入所述安装座17内,所述送料翻转装置1通过所述安装座17进行安置;通过这样设置,便于送料翻转装置1整体安装在输送生产线上。
参见图1、图2、图8至图10,在一种实施例中,所述铆接装置2通过第二竖向推进机构安装在所述第一输送机构4侧部,并且位于所述第二输送机构5上方,所述第二竖向推进机构用于将铆接装置2推送至装配治具51上端对感温装置配件进行铆接加工,具体的,所述第二竖向推进机构包括竖向设置在安装架3上的第四气缸201,所述铆接装置2设于所述第四气缸201的输出端,所述第四气缸用于驱动所述铆接装置2竖向往复滑动;通过这样设置,便于铆接装配与装配治具51上端的感温装置配件进行铆接加工。
在一种实施例中,所述铆接装置2包括上侧上侧开口的铆接座21,可转动设于所述铆接座21上的转动件22、至少两个滑块23、设于滑块23上的顶针231、导向盘24及驱动所述转动件22的旋转驱动机构203,所述铆接座21中部设有连通其下侧的加工孔211,所述铆接座21内设有沿所述加工孔211径向设置的滑槽212,所述滑槽212上侧开口,所述滑块23可滑动设于所述滑槽212内,所述导向盘24设有与所述滑块23传动连接的导向结构,所述导向结构包括以所述加工孔211为中心的向心圆弧轨迹,所述导向盘24与所述转动件22传动连接,所述转动件22相对所述铆接座21转动时,可通过所述导向盘24带动所述滑块23沿所述滑槽212向所述加工孔211一侧往复移动;将装配治具51上端的感温装置配件放入加工孔211内,通过相对铆接座21旋转转动件22,即可实现多个顶针231同时对上盖91和内卡件94外周进行铆接加工,仅需通过一个动作即可完成工件铆接加工,装配铆接效率高,使用方便。
在一种实施例中,所述转动件22两侧设有传动杆27,所述铆接装置2通过支架204安装在所述第四滑座202上,所述旋转驱动机构203包括设于所述支架204上分别与两所述传动杆27连接的第五气缸205和第六气缸206,所述第五气缸205和第六气缸206通过分别一个气缸单独伸出,另一个气缸缩进实现驱动所述转动件22转动;通过这样设置,采用机械操控所述转动件22方式简单。
在一种实施例中,所述第二输送机构5位于所述铆接装置2下方设有第五检测器85,优选的,所述第五检测器85为光纤传感器,所述第五检测器85检测到第二输送机构5上位于所述铆接装置2下方途径有装配治具51时,则反馈信号至控制模块控制第二输送机构5暂停工作,随之控制所述第四气缸驱动所述铆接装置2下移至上端带有感温装置配件的装配治具51伸入所述加工孔211内,然后,控制模块控制旋转驱动机构203驱动所述传动杆27对感温装置进行铆接加工,然后,所述旋转驱动机构203复位,所述第四气缸驱动所述铆接装置2上移至原始位置,最后第二输送机构5的电机恢复工作。所述第四气缸、第五气缸205、第六气缸206和第一输送机构4的电机的工作顺序可通过现有的控制程序配合第五检测器85在时间上的时差顺序进行控制或通过控制模块配合第四检测器84和多个限位传感器(如多个光纤传感器、多个接近开关等)在触发的时机上进行先后顺序的工作,上述机械部件的工作方式可通过现有的电气部件控制方式进行控制,这些控制方式均属于电气控制领域的常规技术手段,并不是本发明的创新点,本发明的创新点在于采用机械自动化的方式取代传统人工方式对感温装置进行组装生产。
在一种实施例中,所述第二输送机构5上无需设置第五检测器85,所述第二输送机构5设计成当第四传感器被触发时,第二输送机构5的一个装配治具51位于所述送料翻转装置1的活动轨迹上,同时另一装配治具51位于所述铆接装置2下方;这样设置可以减少检测器的使用数量,有效降低成本。
参见图8至图10,在一种实施例中,所述滑块23顶部设有导向凸块232,所述导向结构为设于所述导向盘24上以所述加工孔211为中心的向心圆弧滑孔241,所述导向凸块232位于所述滑孔241内;通过这样设置,通过导向盘24的导向结构带动滑块23往复运动,设置巧妙。
在一种实施例中,所述转动件22为中空状,所述转动件22内周设有驱动座25,优选的,所述转动件22和所述驱动座25为一体结构,方便产品生产制造,所述驱动座25的内周对应所述滑块23设有以所述加工孔211为中心的离心圆弧避让槽251,所述圆弧避让槽251的最大深度和滑槽212长度之和等于所述滑块23的长度;通过这样设置,使驱动座25具有滑块23复位时避让空间,而且使圆弧避让槽251的内侧壁形成驱动面驱动滑块23滑动,使滑块23滑动更畅顺。
在一种实施例中,所述滑块23末端对应所述圆弧避让槽251的内侧壁设有滚动轴承233;通过这样设置,避免滑块23与圆弧避让槽251的内侧壁形成摩擦损耗,提高产品可靠性。
在一种实施例中,所述滑块23和滑槽212对应设有四个,并所述在一种实施例中,在所述铆接座21内等角度设置;通过这样设置,工件铆接效果好。
在一种实施例中,所述铆接座21内设有多个固定块213,所述固定块213之间形成所述滑槽212,还包括盖体26,所述盖体26顶部连接在支架204底部,所述导向盘24为中空环状,所述盖体26底部对应所述导向盘24内圈设有圆形定位部261,所述定位部261穿过所述导向盘24内圈与所述铆接座21的固定块213固定连接,该链接方式例如是螺钉连接等;通过这样设置,盖体26与铆接座21的装配使导向盘24夹设在两者直接,简化装配工艺。
参见图2,在一种实施例中,所述第二输送机构5的输送带固定排布设有多个所述装配治具51;所述第二输送机构5的输出端设有外端为弧形状的下料板53,所述下料板53的端部半径自所述第二输送机构5一端向另一端逐渐增大,所述装配治具51移动至第二输送机构5输出端时,所述装配治具51上端的感温装置会沿所述下料板53边沿滑动,从而逐渐增大与装配治具51上端的距离,最后完成下料;通过这样设置,通过下料板53实现自动下料,使用方便。
可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明的保护范围。
- 一种感温装置自动组装生产设备
- 一种基于形状记忆聚氨酯的感温自组装装置