电动汽车的驾驶控制方法、装置及电动汽车
文献发布时间:2023-06-19 11:30:53
技术领域
本申请涉及车辆技术领域,特别涉及一种电动汽车的驾驶控制方法、装置及电动汽车。
背景技术
目前,电动汽车已经逐渐成为人们的代步工具,随着市场上电动汽车保有量的不断增加,电动汽车的驾驶便利性已经是广大车主们关注的重点。由于电动汽车多为单级减速器驱动,普遍采用双踏板结构,其中,加速踏板用于驱动车辆加速,制动踏板控制车辆制动停车。
相关技术中,通过将加速踏板的控制行程划分为制动段0-A、滑行段A-B和加速段B-100%,使得单踏板的操作满足车辆前进、滑行和制动等正常行驶工况的需求,实现单踏板驾驶模式。
然而,在单踏板驾驶模式下,电动汽车的停车过程仍然需要依靠制动踏板,通过机械抱死车轮实现停车,因此,电动汽车单踏板驾驶模式下的停车问题,有待解决。
申请内容
本申请提供一种电动汽车的驾驶控制方法、装置及电动汽车,以解决电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
本申请第一方面实施例提供一种电动汽车的驾驶控制方法,包括以下步骤:
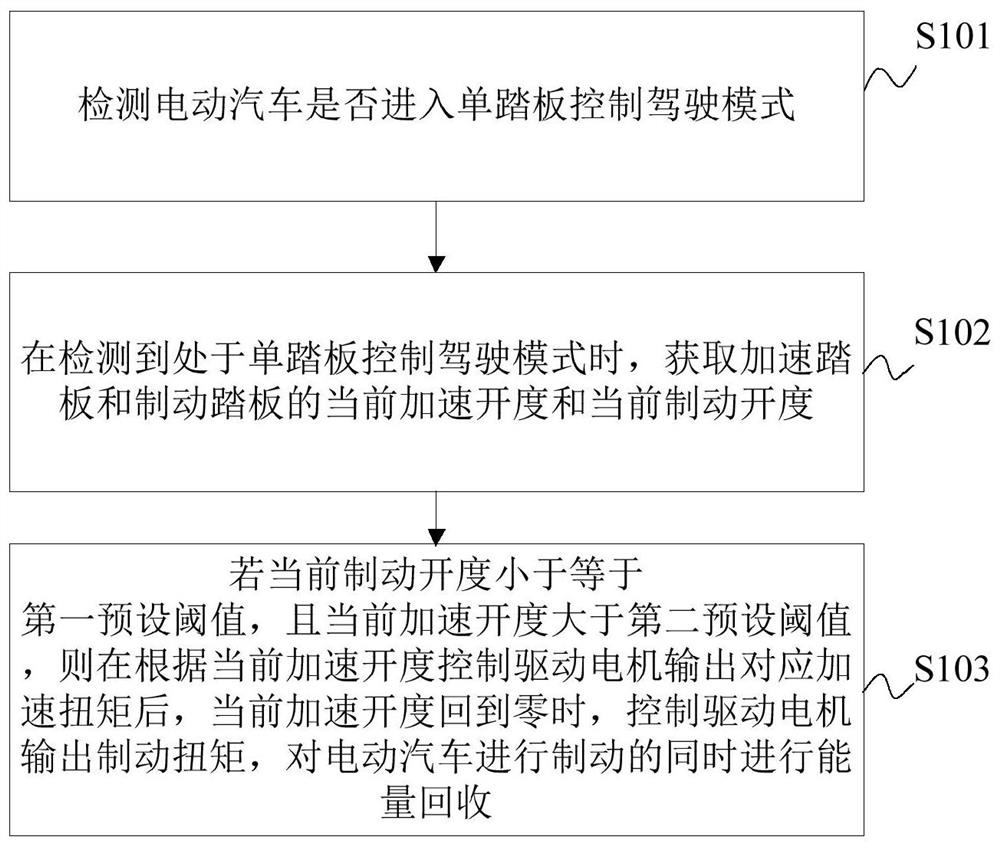
检测电动汽车是否进入单踏板控制驾驶模式;
在检测到处于所述单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度;
若所述当前制动开度小于等于第一预设阈值,且所述当前加速开度大于第二预设阈值,则在根据所述当前加速开度控制驱动电机输出对应加速扭矩后,所述当前加速开度回到零时,控制所述驱动电机输出制动扭矩,对所述电动汽车进行制动的同时进行能量回收。
可选地,所述第一预设阈值和所述第二预设阈值均为零。
可选地,还包括:
获取所述电动汽车的实际转速;
在所述实际转速低于预设转速时,控制所述驱动电机进入驻车模式,以基于所述电动汽车当前所处坡度控制所述驱动电机处于零转速状态。
可选地,所述检测电动汽车是否处于单踏板控制驾驶模式,包括:
检测所述电动汽车是否满足单踏板控制条件;
若所述电动汽车满足所述单踏板控制条件,则根据单踏板控制请求控制所述电动汽车进入所述单踏板控制驾驶模式。
可选地,所述检测所述电动汽车是否满足单踏板控制条件,包括:
检测所述电动汽车是否处于Ready状态;
检测所述电动汽车的当前档位是否为D挡;
检测所述电动汽车的水泵的工作状态是否为正常工作状态;
检测所述电动汽车的电驱动系统是否出现故障;
检测所述电动汽车是否处于禁止能量回收状态。
本申请第二方面实施例提供一种电动汽车的驾驶控制装置,包括:
检测模块,用于检测电动汽车是否进入单踏板控制驾驶模式;
第一获取模块,用于在检测到处于所述单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度;
第一控制模块,用于在所述当前制动开度小于等于第一预设阈值,且所述当前加速开度大于第二预设阈值时,在根据所述当前加速开度控制驱动电机输出对应加速扭矩后,所述当前加速开度回到零时,控制所述驱动电机输出制动扭矩,对所述电动汽车进行制动的同时进行能量回收。
可选地,所述第一预设阈值和所述第二预设阈值均为零。
可选地,还包括:
第二获取模块,用于获取所述电动汽车的实际转速;
第二控制模块,用于在所述实际转速低于预设转速时,控制所述驱动电机进入驻车模式,以基于所述电动汽车当前所处坡度控制所述驱动电机处于零转速状态。
可选地,所述检测模块,包括:
检测单元,用于检测所述电动汽车是否满足单踏板控制条件;
控制单元,用于在所述电动汽车满足所述单踏板控制条件时,根据单踏板控制请求控制所述电动汽车进入所述单踏板控制驾驶模式。
可选地,所述检测单元,包括:
检测所述电动汽车是否处于Ready状态;
检测所述电动汽车的当前档位是否为D挡;
检测所述电动汽车的水泵的工作状态是否为正常工作状态;
检测所述电动汽车的电驱动系统是否出现故障;
检测所述电动汽车是否处于禁止能量回收状态。
本申请第三方面实施例提供一种电动汽车,其包括上述的电动汽车的驾驶控制装置。
由此,可以在检测到电动汽车处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度,并在当前制动开度小于一定值,且当前加速开度大于一定值时,在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收,解决了相关技术中电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
附图说明
本申请上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
图1为根据本申请实施例提供的一种电动汽车的驾驶控制方法的流程图;
图2为根据本申请一个实施例的单踏板控制驾驶模式的控制方法的流程图;
图3为根据本申请一个实施例的电机停车功能的流程图;
图4为根据本申请实施例的电动汽车的驾驶控制装置的示例图。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
下面参考附图描述本申请实施例的电动汽车的驾驶控制方法、装置及电动汽车。针对上述背景技术中心提到的电动汽车单踏板驾驶模式下的停车问题,本申请提供了一种电动汽车的驾驶控制方法,在该方法中,可以在检测到电动汽车处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度,并在当前制动开度小于一定值,且当前加速开度大于一定值时,在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收,解决了相关技术中电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
具体而言,图1为本申请实施例所提供的一种电动汽车的驾驶控制方法的流程示意图。
如图1所示,该电动汽车的驾驶控制方法包括以下步骤:
在步骤S101中,检测电动汽车是否进入单踏板控制驾驶模式。
可选地,在一些实施例中,检测电动汽车是否处于单踏板控制驾驶模式,包括:检测电动汽车是否满足单踏板控制条件;若电动汽车满足单踏板控制条件,则根据单踏板控制请求控制电动汽车进入单踏板控制驾驶模式。
应当理解的是,本申请实施例可以通过控制器检测电动汽车是否满足单踏板控制条件,例如,检测电动汽车是否处于Ready状态;检测电动汽车的当前档位是否为D挡;检测电动汽车的水泵的工作状态是否为正常工作状态;检测电动汽车的电驱动系统是否出现故障;检测电动汽车是否处于禁止能量回收状态。
举例而言,如果电动汽车不处于Ready状态,则说明电动汽车未进入单踏板控制驾驶模式;如果电动汽车处于Ready状态、电动汽车的当前档位为D挡、电动汽车的水泵的工作状态为正常工作状态、电动汽车的电驱动系统未出现故障、电动汽车处于禁止能量回收状态等情况下时,说明电动汽车满足单踏板控制条件,电动汽车进入单踏板控制驾驶模式。
在步骤S102中,在检测到处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度。
其中,在电动汽车进入单踏板控制驾驶模式后,整车控制器可以实时接收加速踏板和制动踏板的信号。
在步骤S103中,若当前制动开度小于等于第一预设阈值,且当前加速开度大于第二预设阈值,则在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收。
其中,第一预设阈值和第二预设阈值均可以是用户预先设定的阈值,可以是通过有限次实验获取的阈值,也可以是通过有限次计算机仿真得到的阈值。
优选地,在一些实施例中,第一预设阈值和第二预设阈值均为零。
具体而言,在检测到电动汽车处于单踏板控制驾驶模式时,整车控制器实时获取加速踏板和制动踏板的信号(即,当前加速开度和当前制动开度),如果当前制动开度小于等于0,且当前加速开度大于0时,整车控制器根据当前加速开度调节转矩命令,控制驱动系统输出转矩驱动车辆;当前加速开度为0时,整车控制器请求制动转矩控制驱动系统进行能量回收,实现车辆制动。
可选地,在一些实施例中,还包括:获取电动汽车的实际转速;在实际转速低于预设转速时,控制驱动电机进入驻车模式,以基于电动汽车当前所处坡度控制驱动电机处于零转速状态。
也就是说,在车速制动到预设转速以下时,整车控制器请求电机控制器进入停车功能,电机控制器实时接收整车控制器和坡道传感器的CAN(Controller Area Network,控制器局域网络)信号,控制电机稳定在零转速,实现车辆停车。
为使得本领域技术人员进一步了解本申请实施例的电动汽车的驾驶控制方法,下面结合图2和图3进行详细说明。
其中,本申请实施例的电动汽车的驾驶控制方法涉及的硬件主要包括:整车控制器、电机控制器、电机、加速踏板、制动踏板、坡道传感器以及单踏板驾驶模式开关。在单踏板控制驾驶模式下,整车控制器通过CAN网络接收电机控制器、加速踏板、制动踏板及坡道传感器的CAN信号,控制电动汽车工作在加速、制动、停车工况下。
具体地,如图2所示,图2为本申请实施例的单踏板控制驾驶模式的控制方法的流程图。该方法包括:
S201,整车Ready。
S202,整车控制器判断单踏板控制驾驶模式开关是否开启,如果是,执行步骤S203,否则,执行步骤S204。
S203,整车控制器判断整车当前状态是否满足单踏板控制驾驶模式,如果是,执行步骤S205,否则,执行步骤S204。
其中,整车当前状态判断包括当前档位是否在D挡、制动踏板是否踩下、水泵是否正常工作、电驱动系统是否有故障以及整车是否禁止能量回收等。
S204,电动汽车工作在正常驾驶模式下。
S205,整车控制器检测油门踏板开度是否大于0,如果是,执行步骤S206,否则,执行步骤S207。
S206,电动汽车工作在加速过程。
S207,电动汽车工作在制动过程。
S208,判断电机转速是否小于预设转速N,如果是,执行步骤S209,否则,执行步骤S207。
S209,电动汽车工作在停车过程。
如图3所示,图3为本申请一个实施例的电机停车功能的流程图,包括以下步骤:
S301,整车控制器请求电机控制器进入停车功能
具体而言,电动汽车开启单踏板控制驾驶模式,松开加速踏板后,当整车制动到电机转速低于预设转速N时,整车控制器请求电机控制器进入停车功能;电机转速N与坡度值相关,坡道传感器采集的坡度值越大,电机转速N的取值越大。
S302,电机控制器通过CAN总线接收到整车控制器的命令后,判断电驱动系统当前状态是否满足进入停车功能,如果是,执行步骤S304,否则,执行步骤S303。
其中,电驱动系统当前状态判断主要包括电机控制器及电机当前是否存在故障、电机当前转速是否在安全转速内。
S303,电机控制器退出停车功能,控制车辆正常工作。
S304,电机控制器判断电机当前转速是否小于0rpm,如果是,执行步骤S309,否则,执行步骤S305。
S305,电机控制器根据坡度值进行预加载转矩操作。
也就是说,本申请实施例的电机控制器可以控制电机进行预加载转矩操作,即从当前转矩以固定梯度递增到预加载目标转矩;预加载目标转矩大小与坡度值相关,是电动汽车稳定在当前坡度所需转矩。
S306,电机控制器判断预加载转矩操作是否完成,如果是,执行步骤S307,否则,执行步骤S305。
其中,电机当前输出转矩与预加载目标转矩的误差在±1Nm以内判定为预加载转矩操作完成。
S307,电机控制器判断电机当前转速是否小于0rpm,如果是,执行步骤S309,否则,执行步骤S308。
S308,电机控制器控制电机输出转矩以固定梯度递减,直到满足电机当前转速小于0rpm。
S309,电机控制器进入转速环调节,控制车辆停车。
需要说明的是,转速环调节过程通过设置电机目标转速为0rpm,以目标转速与当前转速的差值作为输入,以PI调节出的控制转矩作为输出,控制电机转速稳定在0rpm。
S310,电机控制器判断停车功能退出条件是否满足,如果是,执行步骤S311,否则,执行步骤S312。
其中,停车功能的退出条件是否满足通过整车控制器是否请求退出该功能、电驱动系统是否发生故障以及当前转速是否超出安全转速来判断,
S311,电机控制器退出停车功能,车辆正常工作。
S312,电机控制器维持停车功能,保持车辆静止。
需要说明的是,电动汽车的加速过程和制动过程可以参见相关技术中的控制方式,为避免冗余,在此不做详细赘述。
根据本申请实施例提出的电动汽车的驾驶控制方法,可以在检测到电动汽车处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度,并在当前制动开度小于一定值,且当前加速开度大于一定值时,在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收,解决了相关技术中电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
其次参照附图描述根据本申请实施例提出的电动汽车的驾驶控制装置。
图4是本申请实施例的电动汽车的驾驶控制装置的方框示意图。
如图4所示,该电动汽车的驾驶控制装置10包括:检测模块100、第一获取模块200和第一控制模块300。
其中,检测模块100用于检测电动汽车是否进入单踏板控制驾驶模式;
第一获取模块200用于在检测到处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度;
第一控制模块300用于在当前制动开度小于等于第一预设阈值,且当前加速开度大于第二预设阈值时,在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收
可选地,第一预设阈值和第二预设阈值均为零。
可选地,还包括:
第二获取模块,用于获取电动汽车的实际转速;
第二控制模块,用于在实际转速低于预设转速时,控制驱动电机进入驻车模式,以基于电动汽车当前所处坡度控制驱动电机处于零转速状态。
可选地,检测模块100包括:
检测单元,用于检测电动汽车是否满足单踏板控制条件;
控制单元,用于在电动汽车满足单踏板控制条件时,根据单踏板控制请求控制电动汽车进入单踏板控制驾驶模式。
可选地,检测单元,包括:
检测电动汽车是否处于Ready状态;
检测电动汽车的当前档位是否为D挡;
检测电动汽车的水泵的工作状态是否为正常工作状态;
检测电动汽车的电驱动系统是否出现故障;
检测电动汽车是否处于禁止能量回收状态。
需要说明的是,前述对电动汽车的驾驶控制方法实施例的解释说明也适用于该实施例的电动汽车的驾驶控制装置,此处不再赘述。
根据本申请实施例提出的电动汽车的驾驶控制装置,可以在检测到电动汽车处于单踏板控制驾驶模式时,获取加速踏板和制动踏板的当前加速开度和当前制动开度,并在当前制动开度小于一定值,且当前加速开度大于一定值时,在根据当前加速开度控制驱动电机输出对应加速扭矩后,当前加速开度回到零时,控制驱动电机输出制动扭矩,对电动汽车进行制动的同时进行能量回收,解决了相关技术中电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
此外,本申请实施例还提出了一种电动汽车,该电动汽车包括上述的电动汽车的驾驶控制装置。
根据本申请实施例提出的电动汽车,通过上述的电动汽车的驾驶控制装置,解决了相关技术中电动汽车单踏板驾驶模式下的停车问题,在单踏板控制驾驶模式,依靠电机控制的停车功能,降低了制动踏板的使用频率,提高了电动汽车驾驶便捷性以及能量利用效率。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或N个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“N个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更N个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本申请的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本申请的实施例所属技术领域的技术人员所理解。
应当理解,本申请的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,N个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
- 电动汽车的驾驶控制方法、装置及电动汽车
- 基于连接配电线路的变压器的负荷量和设置于电线杆的电动汽车充电装置、电动汽车充电系统以及设置于电线杆的电动汽车充电装置的控制方法