一种用于推进任务的惰轮惯性动力装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及应用于航空航天和日常交通车辆的动力系统,主要涉及一种用于推进任务的惰轮惯性动力装置。
背景技术
自从蒸汽机发明至今,人类对动力系统的革命成为工业革命之后最为显著的目标之一,动力系统为日常交通的车辆、航空航天的飞机以及太空探测的推进器等提供源源不断的动力。目前常用的发动机动力系统主要包括活塞式动力系统,空气喷气式动力系统,火箭式动力系统和组合式发动机。活塞式发动机是把燃料的热能转化为带动螺旋桨或旋翼转动的机械能,其缺点是不能直接产生使飞行器前进的推力或拉力;空气喷气式发动机利用大气层中的空气与所携带的燃料燃烧产生高温气体推动,缺点是依赖于空气的氧气作为氧化剂。火箭发动机是完全依靠自身携带的氧化剂和燃料产生高温、高压气体或等离子体高速喷出获得反向推力,该动力系统可以在大气层外或高空中使用,其缺点是依赖于携带的燃料;组合式动力系统是综合以上两种或两种以上的混合动力系统,在使用上述动力系统提供动力时同样需要面临对应的动力系统弊端。上述四种动力系统均是将电能-内能-机械能的间接转换,间接转换使得整理的效率较低,能量消耗较大,尤其在航空航天领域中,较大的能量消耗意味着有更大的风险和成本。与此同时由于内能的转化会产生一些具有污染的物质,对环境的安全造成一定的影响。
发明内容
根据以上研究背景,本发明提出一种用于推进任务的惰轮惯性动力装置。该系统利用装置的惰轮惯性为动力输出,直接电能转换为惰轮机械能并转移到动力系统。该系统具有较高的转化效率,同时利用惯性作为动力源,不需要携带任何燃料,可有效降低动力系统的运行成本。同时该动力系统不会产生任何污染气体,对环境友好,可在有无重力作用下工作,可用临近空间,近地空间和深空探测用的推进任务,该动力系统较高的经济性和实用性。
本发明目的就是为了弥补已有技术的缺陷,提供一种用于推进任务的惰轮惯性动力装置。
本发明是通过以下技术方案实现的:
质量作为物质最基本的属性,不随空间位置发生变化。惯性是物质质量的一种具体体现,惯性大小与物质的质量多少决定。本发明中利用惰轮在转动过程的方向性,在转动过程中将惰轮的动能转化成动力系统的动能。根据动量守恒可知在系统不受外力作用下,系统的动量是守恒的。假设惰轮的质量和速度分别为m
m
V
由(式1)和(式2)可得动力装置的速度V
F=m
(式3)中L为惰轮的旋转半径。当惰轮做回旋运动时,惰轮的旋转速度远大于系统的旋转,因此可以认为总系统没有做反向回旋运行。在惰轮的一个回旋周期内通过对运行轨迹做固定规划可以使得运动周期内满足定向运行。
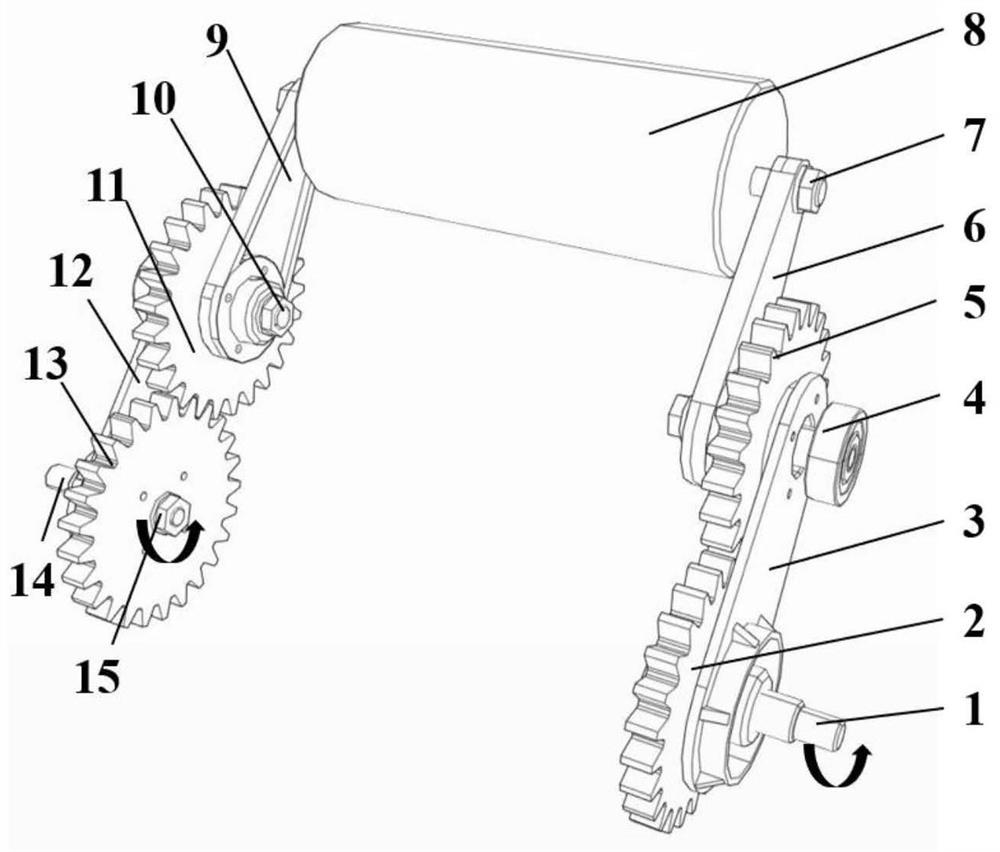
一种用于推进任务的惰轮惯性动力装置,包括主动轴1、主动齿轮2、主动拉杆3、行星轴承4、从动齿轮a5、惰轮拉杆a6、惰轮螺栓7、惰轮8、惰轮拉杆b9、从动轮螺栓10、从动齿轮b11、从动轮拉杆12、从动齿轮c13、补偿轴14、从动轴螺栓15。
所述的主动轴1需要连接高速电机输入转矩提供动力。
所述的主动齿轮2、从动齿轮a5、从动齿轮b11、从动齿轮c13为同一齿轮模数。优选地,所述的齿轮模数为2。齿轮的齿数与根据不同的动力大小进行设计。
主动拉杆3约束从动齿轮a5和从动齿轮b11保持正常啮合运动。
所述惰轮拉杆a6和惰轮拉杆b9对从动齿轮a5和从动齿轮b11进行固定约束。且惰轮拉杆a6和惰轮拉杆b9的长度可根据工况进行设计。
所述惰轮螺栓7、从动轮螺栓10和从动轴螺栓15分别对惰轮8、从动齿轮a5、从动齿轮b11、主动齿轮2和从动齿轮c13进行固定。
所述补偿轴14为输入轴的质量补偿,确保动力装置的重心不偏心。
本发明的一种用于推进任务的惰轮惯性动力装置,动力系统之间将电能转换成机械能,利用惰轮的惯性获得定向运动的动力。与系统做在的空间位置和有无重力场作用均无关。该动力系统无需携带任何燃料,仅需要通电由电机提供转矩即可完成独立工作。可通过调节转速获得不同的动力大小,具有结构简单,便于操作,清洁无污染的优势。
利用高速电机从右侧主动轴1一端提供转矩输入即可进行工作,在系统另一端配有质量补偿使得动力系统总重心在垂直中线位置。
惰轮8高速旋转运动周期内速度的大小和方向均发生改变,惰轮8旋转一周将带动装置移动固定的位移,位移的大小由惰轮8旋转的半径决定。
惰轮高速旋转运动周期获得单向速度,单向移动速度大小与回旋运行转速和惰轮和整体的质量比有关。
惰轮通过两个拉杆进行连接,两拉杆满足在较高转速下的向心力下防止惰轮飞出。
惰轮8的运行轨迹由一组行星齿轮进行约束,惰轮的运动包括两个:分别是绕惰轮中心和驱动轴中心的回旋运动。惰轮的质心的运行轨迹是单向非对称,回旋一周期内惰轮质心向单一方向移动固定的距离。
惰轮8的运行轨迹由一组主动齿轮2和从动齿轮a5组成的行星齿轮进行约束,主动齿轮2固定安装在主动轴1上,主动拉杆3一端通过轴承安装在主动轴1上,从动齿轮a5固定在主动拉杆3另一端,惰轮8的运动包括两个:分别是绕惰轮中心和驱动轴中心的回旋运动;惰轮的质心的运行轨迹是单向非对称,回旋一周期内惰轮质心向单一方向移动固定的距离。
采用本发明在工作中,通过给高速电机提供0-12V电压,转速可根据输入功率进行调整。电机的转矩输入到主动轴1,主动轴1通过转矩带动主动齿轮2转动。主动齿轮2通过齿轮啮合带动惰轮绕驱动轴中心进行旋转,拉杆3为行星齿轮限位作用。通过齿轮啮合作用,惰轮8同时也绕行星轴承4的轴线进行旋转,惰轮旋转一周期质心轨迹是非圆形对称的封闭曲线,惰轮质心运行轨迹积分不为0,而是产生固定一个方向位移,该位移使得与该动力装置连接的部件产生同样的位移效果,从而提供一个定向动力。
本发明的优点主要在于:
本发明相对于传统的动力系统而言,在本发明工作过程中无需携带任何燃料、无燃料反应、绿色无污染,在工作中仅需提供电能或转矩即可,同时该动力装置无需依赖重力和空气环境,动力大小与惰轮质量比和转速有关,具有较好的经济性和环境友好性。
附图说明
图1为本发明的用于推进任务的惰轮惯性动力装置结构示意图。
图中,1主动轴、2主动齿轮、3主动拉杆、4行星轴承、5从动齿轮a、6惰轮拉杆a、7惰轮螺栓、8惰轮、9惰轮拉杆b、10从动轮螺栓、11从动齿轮b、12从动轮拉杆、13从动齿轮c、14补偿轴、15从动轴螺栓。
具体实施方式
下面结合附图和具体实例对本发明做进一步的详细说明。本发明的一种用于推进任务的新型高效惰轮惯性动力装置并不限于特定的材质或工艺,以下所述案例仅为本发明的其中之一的实施案例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
如图1所示,一种用于推进任务的惰轮惯性动力装置,包括有主动轴1、主动齿轮2、主动拉杆3、行星轴承4、从动齿轮a5、惰轮拉杆a6、惰轮螺栓7、惰轮8、惰轮拉杆b9、从动轮螺栓10、从动齿轮b11、从动轮拉杆12、从动齿轮c13、补偿轴14、从动轴螺栓15。
所述的主动轴1需要连接高速电机输入转矩提供动力。
所述的主动齿轮2、从动齿轮a5、从动齿轮b11、从动齿轮c13为同一齿轮模数,即m=2。齿轮的齿数与根据不同的动力大小进行设计。
主动拉杆3主要作用是约束从动齿轮a5和从动齿轮b11保持正常啮合运动。
所述惰轮拉杆a6和惰轮拉杆b9与从动齿轮a5和从动齿轮b11进行固定约束,且惰轮拉杆a6和惰轮拉杆b9的长度可根据工况进行设计。
所述惰轮螺栓7、从动轮螺栓10和从动轴螺栓15分别对惰轮8,从动齿轮a5、从动齿轮b11、主动齿轮2和从动齿轮c13进行固定。
所述补偿轴14为输入轴的质量补偿,确保动力装置的重心不偏心。
采用上述的一种用于推进任务的惰轮惯性动力装置,在工作中,通过给高速电机提供0-12V电压,转速可根据输入功率进行调整。电机的转矩输入到主动轴1,主动轴1通过转矩带动主动齿轮2转动。主动齿轮2通过齿轮啮合带动惰轮绕驱动轴中心进行旋转,拉杆3为行星齿轮限位作用。通过齿轮啮合作用,惰轮8同时也绕行星轴承4的轴线进行旋转,惰轮旋转一周期质心轨迹是非圆形对称的封闭曲线,惰轮质心运行轨迹积分不为0,而是产生固定一个方向位移,该位移使得与该动力装置连接的部件产生同样的位移效果,从而提供一个定向动力。
以上所述的实施例仅是对本发明的优选实施方式进行描述,优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种用于推进任务的惰轮惯性动力装置
- 一种用于增能动力装置的行星惯性轮增能组件