人脸聚类子类合并方法、装置及设备
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及人脸识别技术领域,具体涉及一种人脸聚类子类合并方法、装 置及设备。
背景技术
现有技术中,使用比较多的人脸聚类技术有基于融合特征的聚类方法和图 挖掘聚类方法,但是这两种聚类方法在执行时都会出现同一个人脸被分割到不 同子类中的情况,从而导致人脸聚类的准确度较低。
发明内容
本发明实施例提供一种人脸聚类子类合并方法、装置及设备,用以提高人 脸聚类的准确度。
根据第一方面,一种实施例中提供一种人脸聚类子类合并方法,所述方法 包括:
获取目标时间段内、目标区域范围内的多个待聚类人脸图像,并通过预设 人脸聚类算法得到各所述待聚类人脸图像的子类编号;
提取各所述待聚类人脸图像的时空单元,所述时空单元包括各所述待聚类 人脸图像对应的摄像头编号和拍摄时间戳;
将各所述待聚类人脸图像的子类编号和各所述待聚类人脸图像的时空单元 进行关联,得到各所述待聚类人脸图像的时空轨迹特征,其中,所述时空轨迹 特征用于描述所述待聚类人脸图像对应人员的时空轨迹;
根据各所述待聚类人脸图像的时空轨迹特征,计算各所述子类编号的时空 轨迹特征概率分布;
根据所述时空轨迹特征概率分布,通过预设相似度公式,计算两个所述子 类编号之间的概率分布相似度;
若所述概率分布相似度大于第一预设阈值,则合并两个所述子类编号。
可选的,所述合并两个所述子类编号,包括:
将两个所述子类编号合并为相同的子类编号。
可选的,所述根据各所述待聚类人脸图像的时空轨迹特征,计算各所述子 类编号的时空轨迹特征概率分布,包括:
统计各所述子类编号对应人员在每个所述时空单元中出现的第一次数,并 统计各所述子类编号对应人员在所有所述时空单元中出现的第二次数;
将所述第一次数与所述第二次数的比值作为各所述子类编号对应人员在每 个所述时空单元中出现的概率;
将各所述子类编号对应人员在每个所述时空单元中出现的概率,作为各所 述子类编号的时空轨迹特征概率分布。
可选的,所述方法还包括:
计算两个所述子类编号所对应的多个所述时空单元的重合度;
若所述重合度大于第二预设阈值,则计算两个所述子类编号的轨迹特征相 似度。
可选的,所述预设相似度公式为JS散度公式。
可选的,所述拍摄时间戳以拍摄星期和拍摄小时进行度量。
根据第二方面,一种实施例中提供一种人脸聚类子类合并装置,所述装置 包括:
获取模块,用于获取目标时间段内、目标区域范围内的多个待聚类人脸图 像,并通过预设人脸聚类算法得到各所述待聚类人脸图像的子类编号;
提取模块,用于提取各所述待聚类人脸图像的时空单元,所述时空单元包 括各所述待聚类人脸图像对应的摄像头编号和拍摄时间戳;
关联模块,用于将各所述待聚类人脸图像的子类编号和各所述待聚类人脸 图像的时空单元进行关联,得到各所述待聚类人脸图像的时空轨迹特征,其中, 所述时空轨迹特征用于描述所述待聚类人脸图像对应人员的时空轨迹;
第一计算模块,用于根据各所述待聚类人脸图像的时空轨迹特征,计算各 所述子类编号的时空轨迹特征概率分布;
第二计算模块,用于根据所述时空轨迹特征概率分布,通过预设相似度公 式,计算两个所述子类编号之间的概率分布相似度;
合并模块,用于若所述概率分布相似度大于第一预设阈值,则合并两个所 述子类编号。
可选的,所述合并模块,具体用于将两个所述子类编号合并为相同的子类 编号。
可选的,所述第一计算模块,具体用于统计各所述子类编号对应人员在每 个所述时空单元中出现的第一次数,并统计各所述子类编号对应人员在所有所 述时空单元中出现的第二次数;将所述第一次数与所述第二次数的比值作为各 所述子类编号对应人员在每个所述时空单元中出现的概率;将各所述子类编号 对应人员在每个所述时空单元中出现的概率,作为各所述子类编号的时空轨迹 特征概率分布。
可选的,所述装置还包括第三计算模块,用于计算两个所述子类编号所对 应的多个所述时空单元的重合度;若所述重合度大于第二预设阈值,则计算两 个所述子类编号的轨迹特征相似度。
可选的,所述预设相似度公式为JS散度公式。
可选的,所述拍摄时间戳以拍摄星期和拍摄小时进行度量。
根据第三方面,一种实施例中提供一种电子设备,包括:存储器,用于存 储程序;处理器,用于通过执行所述存储器存储的程序以实现上述第一方面中 任一项所述的人脸聚类子类合并方法。
根据第四方面,一种实施例中提供一种计算机可读存储介质,所述介质上 存储有程序,所述程序能够被处理器执行以实现上述第一方面中任一项所述的 人脸聚类子类合并方法。
本发明实施例提供一种人脸聚类子类合并方法、装置及设备,通过获取目 标时间段内、目标区域范围内的多个待聚类人脸图像,并通过预设人脸聚类算 法得到各待聚类人脸图像的子类编号;提取各待聚类人脸图像的时空单元,时 空单元包括各待聚类人脸图像对应的摄像头编号和拍摄时间戳;将各待聚类人 脸图像的子类编号和各待聚类人脸图像的时空单元进行关联,得到各待聚类人 脸图像的时空轨迹特征,其中,时空轨迹特征用于描述待聚类人脸图像对应人 员的时空轨迹;根据各待聚类人脸图像的时空轨迹特征,计算各子类编号的时 空轨迹特征概率分布;通过预设相似度公式,根据时空轨迹特征概率分布,计 算两个子类编号之间的概率分布相似度;若概率分布相似度大于第一预设阈值, 则合并两个子类编号。通过人员时空轨迹特征可以补充数据的维度,并且通过 一定周期的时空轨迹特征的统计规律,可以保证每个子类中的各个人脸特征是 高内聚的,从而提高了人脸聚类的准确度。
附图说明
图1为本发明实施例提供的一种人脸聚类子类合并方法的实施例一的流程 示意图;
图2为本发明实施例提供的一种人脸聚类子类合并方法的实施例二的流程 示意图;
图3为本发明实施例提供的一种人脸聚类子类合并方法的实施例三的流程 示意图;
图4为本发明实施例提供的一种人脸聚类子类合并方法的实施例四的流程 示意图;
图5为本发明实施例提供的一种人脸聚类子类合并装置的结构示意图。
具体实施方式
下面通过具体实施方式结合附图对本发明作进一步详细说明。其中不同实 施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很 多细节描述是为了使得本申请能被更好的理解。然而,本领域技术人员可以毫 不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他 元件、材料、方法所替代。在某些情况下,本申请相关的一些操作并没有在说 明书中显示或者描述,这是为了避免本申请的核心部分被过多的描述所淹没, 而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据 说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合 形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技 术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各 种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有 说明其中某个顺序是必须遵循的。
本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描 述的对象,不具有任何顺序或技术含义。而本申请所说“连接”、“联接”,如无 特别说明,均包括直接和间接连接(联接)。
由于现有技术中,使用比较多的人脸聚类技术有基于融合特征的聚类方法 和图挖掘聚类方法,但是这两种聚类方法在执行时都会出现同一个人脸被分割 到不同子类中的情况,从而导致人脸聚类的准确度较低。为了提高人脸聚类的 准确度,本发明实施例提供了一种人脸聚类子类合并方法、装置及设备,以下 分别进行详细说明。
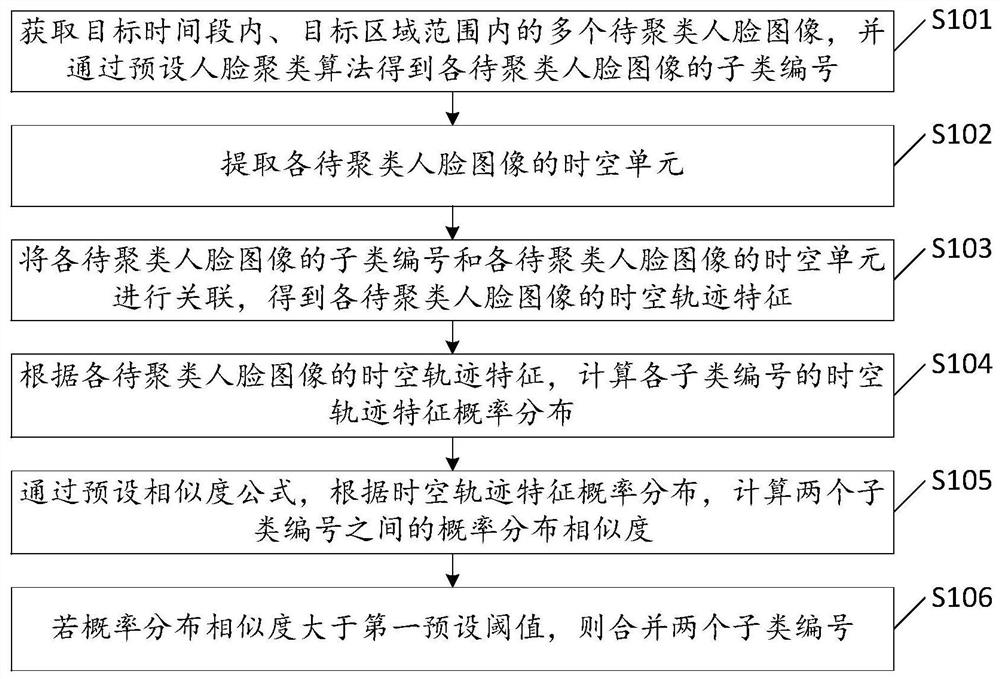
图1为本发明实施例提供的一种人脸聚类子类合并方法的实施例一的流程 示意图,本发明实施例的执行主体为任意具有处理能力的设备。如图1所示, 本实施例提供的人脸聚类子类合并方法可以包括:
S101,获取目标时间段内、目标区域范围内的多个待聚类人脸图像,并通 过预设人脸聚类算法得到各待聚类人脸图像的子类编号。
具体实现时,例如可以获取一周时间内(或者其他时间段内)、××小区(或 者街道、社区区域等其他合适的区域)的多个待聚类人脸图像,用于分析该小 区在这一周时间内出现的人员。在获取各待聚类人脸图像的子类编号时,可以 通过现有的人脸聚类算法实现,例如基于融合特征的聚类算法和图挖掘聚类算 法获取各待聚类人脸图像的子类编号,本发明实施例不对预设人脸聚类算法做 具体的限定。通过上述S101,可以得到各待聚类人脸图像的初始子类编号,便 于后续进行进一步的人脸聚类。
S102,提取各待聚类人脸图像的时空单元。
其中,上述时空单元可以包括各待聚类人脸图像对应的摄像头编号和拍摄 时间戳。具体的,待聚类人脸图像对应的摄像头编号可以反映该人脸出现的空 间信息,例如,待聚类人脸图像对应的摄像头编号为“1”;待聚类人脸图像对 应的拍摄时间戳可以反映摄像头抓拍到该人脸的时间信息,例如,该待聚类人 脸图像对应的拍摄时间戳为“星期三,14时”。一般地,时间戳属性通常需要分 离成多个维度,比如年、月、日、小时、分钟和秒钟。但是在很多的应用中, 过密的信息是不需要的。在本发明实施例中,可以通过日、小时维度,进行拍 摄时间戳信息的提取。具体的,可以将每个小时作为一个时间分区或者将每两 个小时作为一个时间分区,从而大幅降低数据量的提取速度。
S103,将各待聚类人脸图像的子类编号和各待聚类人脸图像的时空单元进 行关联,得到各待聚类人脸图像的时空轨迹特征。
其中,时空轨迹特征用于描述待聚类人脸图像对应人员的时空轨迹。例如, 假设待聚类人脸图像的子类编号(PERSONID)为“5”,该待聚类人脸图像的时 空单元包括的摄像头编号(CAMERA)为“摄像头1”,该待聚类人脸图像的时 空单元包括的拍摄时间戳为“星期一,15时”,将该聚类人脸图像的子类编号和 各待聚类人脸图像的时空单元进行关联后,得到的该待聚类人脸图像的时空轨 迹特征为((CAMERA1,WEEKDAY1,HOUR15),PERSONID5)。
S104,根据各待聚类人脸图像的时空轨迹特征,计算各子类编号的时空轨 迹特征概率分布。
由于各待聚类人脸图像的时空轨迹特征中可以包括待聚类人脸图像的初始 子类编号、空间信息和时间信息,因此可以根据时空轨迹特征,统计各子类编 号对应人员在每个时空单元中出现的概率,从而得到各子类编号的时空轨迹特 征概率分布。具体的,可以通过以下步骤得到各子类编号的时空轨迹特征概率 分布:
步骤a:统计各子类编号对应人员在每个时空单元中出现的第一次数,并统 计各子类编号对应人员在所有时空单元中出现的第二次数。
步骤b:将第一次数与第二次数的比值作为各子类编号对应人员在每个时空 单元中出现的概率。
步骤c:将各子类编号对应人员在每个时空单元中出现的概率,作为各子类 编号的时空轨迹特征概率分布。
例如,假设通过上述S101得到10个子类编号,分别为子类编号1-5,子类 编号1对应3个待聚类人脸图像,子类编号2对应7个待聚类人脸图像,子类 编号3对应5个待聚类人脸图像,子类编号4对应4个待聚类人脸图像,子类 编号5对应6个待聚类人脸图像。其中,这25个待聚类人脸图像对应的所有时 空单元共有100个,假设子类编号1对应人员在时空单元1中出现的第一次数 为3次,子类编号1对应人员在时空单元2中出现的第一次数为10次,子类编 号1对应人员在所有时空单元中出现的第二次数为50次,那么,子类编号1对 应人员在时空单元1中出现的概率为0.06,子类编号1对应人员在时空单元2 中出现的概率为0.1,以此类推,得到子类编号1对应人员在剩余的98个时空 单元中出现的概率,将子类编号1对应人员分别在100个时空单元中出现的概 率作为子类编号1的时空轨迹特征概率分布。以此类推,得到子类编号2-5的时 空轨迹特征概率分布。
S105,通过预设相似度公式,根据时空轨迹特征概率分布,计算两个子类 编号之间的概率分布相似度。
具体实现时,可以通过JS散度(Jensen-Shannon Divergence)公式计算两个 子类编号之间的概率分布相似度。其中,JS散度可以度量两个概率分布的相似 度,它在KL散度(Kullback–Leibler Divergence)的基础上进行计算,解决了 KL散度非对称的问题。
S106,若概率分布相似度大于第一预设阈值,则合并两个子类编号。
具体实现时,若概率分布相似度大于第一预设阈值,则将这两个子类编号 合并为相同的子类编号。举例说明,若概率分布相似度大于第一预设阈值,可 以将二者中较大的子类编号修改为二者中较小的子类编号,例如,若子类编号 10和子类编号2之间的概率分布相似度大于第一预设阈值,则将子类编号10修 改为子类编号2,即实现了子类编号10和子类编号2的合并;若概率分布相似 度大于第一预设阈值,可以将二者中较小的子类编号修改为二者中较大的子类 编号,例如,若子类编号15和子类编号5之间的概率分布相似度大于第一预设 阈值,则将子类编号5修改为子类编号15,即实现了子类编号5和子类编号15的合并;若概率分布相似度大于第一预设阈值,可以将这两个子类编号统一修 改为预设子类编号,例如,若子类编号8和子类编号9之间的概率分布相似度 大于第一预设阈值,则将子类编号8和子类编号9修改为预设的子类编号100, 即实现了子类编号8和子类编号9的合并。
本发明实施例提供的人脸聚类子类合并方法,通过获取目标时间段内、目 标区域范围内的多个待聚类人脸图像,并通过预设人脸聚类算法得到各待聚类 人脸图像的子类编号;提取各待聚类人脸图像的时空单元,时空单元包括各待 聚类人脸图像对应的摄像头编号和拍摄时间戳;将各待聚类人脸图像的子类编 号和各待聚类人脸图像的时空单元进行关联,得到各待聚类人脸图像的时空轨 迹特征,其中,时空轨迹特征用于描述待聚类人脸图像对应人员的时空轨迹; 根据各待聚类人脸图像的时空轨迹特征,计算各子类编号的时空轨迹特征概率 分布;根据时空轨迹特征概率分布,通过预设相似度公式,计算两个子类编号 之间的概率分布相似度;若概率分布相似度大于第一预设阈值,则合并两个子 类编号。通过人员时空轨迹特征可以补充数据的维度,并且通过一定周期的时 空轨迹特征的统计规律,可以保证每个子类中的各个人脸特征是高内聚的,从 而提高了人脸聚类的准确度。
图2为本发明实施例提供的一种人脸聚类子类合并方法的实施例二的流程 示意图,如图2所示,本实施例提供的人脸聚类子类合并方法可以包括:
S201,获取目标时间段内、目标区域范围内的多个待聚类人脸图像,并通 过预设人脸聚类算法得到各待聚类人脸图像的子类编号。
S202,提取各待聚类人脸图像的时空单元。
S203,将各待聚类人脸图像的子类编号和各待聚类人脸图像的时空单元进 行关联,得到各待聚类人脸图像的时空轨迹特征。
S204,根据各待聚类人脸图像的时空轨迹特征,计算各子类编号的时空轨 迹特征概率分布。
S205,计算两个子类编号所对应的多个时空单元的重合度。
举例说明,例如子类编号1对应20个待聚类人脸图像,这20个待聚类人 脸图像所对应的时空单元有50个,子类编号2对应30个待聚类人脸图像,这 30个待聚类人脸图像所对应的时空单元有60个,其中,子类编号1所对应的 50个时空单元中,有40个时空单元与子类编号2所对应的时空单元重合。那么, 针对子类编号1,子类编号2与子类编号1的时空单元重合度为80%;针对子类 编号2,子类编号1与子类编号2的时空单元重合度为66.7%,则确定子类编号 1与子类编号2的时空单元的重合度较高。
S206,若重合度大于第二预设阈值,则根据时空轨迹特征概率分布,通过 预设相似度公式,计算两个子类编号之间的概率分布相似度。
S207,若概率分布相似度大于第一预设阈值,则合并两个子类编号。
本发明实施例提供的人脸聚类子类合并方法,通过计算两个子类编号所对 应的多个时空单元的重合度,可以只选取具有较高时空单元重合度的两个子类 编号,进行概率分布相似度的计算,从而大幅降低计算量。
图3为本发明实施例提供的一种人脸聚类子类合并方法的实施例三的流程 示意图,如图3所示,本实施例提供的人脸聚类子类合并方法可以包括:
S301,构造人员时空轨迹特征。
具体实现时,可以选取每个待聚类人脸图像对应的摄像头编号、拍摄时间 戳和预先获取到的人员聚类编号三个维度的数据用于构造人员时空轨迹特征。
上述构造人员时空轨迹特征可以包括以下步骤:
步骤a:选择特征。
特征选择的目的是从待聚类人脸图像对应的特征集合中挑选一组对于分析 目标最具统计意义的特征子集,从而达到数据降维的效果。在本发明实施例中, 可以选择每个待聚类人脸图像对应的摄像头编号、拍摄时间戳和人员聚类编号 (即上文中的子类编号)这三个特征,用于描述人员活动轨迹特征。
步骤b:拍摄时间戳分区。
时间戳属性通常需要分离成多个维度,比如年、月、日、小时、分钟和秒 钟。但是在很多的应用中,过密的信息是不需要的。因此在本发明实施例中, 不需要通过分钟和秒钟去学习人员时空轨迹特征,并且维度“年”和“月”也 不能很好的给模型增加值的变化,因此,仅仅需要日维度和小时维度即可。进 一步的,可以把每个小时作为一个时间分区,也可以把每两个小时作为一个时 间分区,本发明实施例不做具体的限定。通过这样的拍摄时间戳分区方法,可 以大幅降低数据量,从而提升计算速度。
步骤c:构造时空单元交叉特征。
交叉特征是特征工程中非常重要的方法之一,它是将两个或更多的类别属 性组合成一个,组合的特征有时要比单个特征更好。数学上来说,是对多个类 别特征的所有可能值进行交叉相乘。假如选择了两个特征,特征A和特征B, 特征A有两个可能值{A1,A2},特征B有两个可能值{B1,B2},那么,特征A和 特征B之间的交叉特征可以包括:{(A1,B1),(A1,B2),(A2,B1),(A2,B2)},每个组 合特征代表着A和B各自信息的协同作用。
在本发明实施例中,可以选择待聚类人脸图像对应的摄像头编号、拍摄星 期和拍摄小时联合,构造交叉特征,用于描述时空轨迹的时空单元。例如,形 成的时空单元交交叉特征可以为:
{(CAMERA1,WEEKDAY1,HOUR1),(CAMERA1,WEEKDAY1,HOUR2),(CA MERA2,WEEKDAY1,HOUR1),(CAMERA2,WEEKDAY2,HOUR2)}。
步骤d:构造时空轨迹特征。
构造时空轨迹特征的目的是用于描述人员在各个时空单元的活动轨迹。具 体的,时空轨迹特征包含时空单元交叉特征和对应的人员聚类编号,其中,时 空单元交叉特征包含待聚类人脸图像对应的摄像头编号、拍摄的星期和拍摄小 时,这三个维度的数据,人员轨迹使用人员聚类编号来描述。例如,形成的时 空轨迹特征可以为:
{((CAMERA1,WEEKDAY1,HOUR1),PERSONID1),((CAMERA1,WEEKDA Y1,HOUR2),PERSONID1),((CAMERA2,WEEKDAY1,HOUR1),PERSONID1),((C AMERA2,WEEKDAY2,HOUR2),PERSONID2)}。
S302,计算概率分布。
计算每个人员聚类编号(PERSONID)各周时间范围内在各个时空单元中的 概率分布p(i),p(i)的数据形式可以为 ((CAMERAID,WEEKDAY,HOUR),PERSONID,p)。
针对每个人员聚类编号PERSONID(i),在一周的时间周期内累加它在所有 时空单元中出现的总次数作为分母M,将它在每个时空单元出现的次数作为分 子N,相除得出的值N/M作为PERSONID(i)在每个时空单元中的出现概率p。 如果N/M为零的话,可以设定概率p为一个极小的正实数。因此,得到的概率 分布形式可以为:
{((CAMERA1,WEEKDAY1,HOUR1),PERSONID(i),p1),((CAMERA1,WEEK DAY1,HOUR2),PERSONID(i),p2)......}。
举例说明,现有10个人员聚类编号,这10个人员聚类编号对应的时空单 元共有10000个,其中,人员聚类编号1在所有时空单元中出现的总次数为50 次,由于人员聚类编号1出现过的时空单元只有时空单元1-10,并且人员聚类 编号1在时空单元1-10出现的次数分别为5次、2次,8次、3次、7次、4次、 6次、1次、9次和5次,那么人员聚类编号1在时空单元1-10中出现的概率为 0.1、0.04、0.16、0.06、0.14、0.08、0.12、0.02、0.18和0.1,人员聚类编号1 在剩余的时空单元11-100中出现的概率为极小的正实数。
S303,计算概率分布相似度。
首先,介绍一下KL散度。KL散度也叫作相对熵,用于衡量两个取值为正 的函数或概率分布之间的差异。其中,p(i)定义为真实事件的概率分布,q(i)定义 为拟合事件的概率分布。KL散度的计算公式如下:
从上述KL散度计算公式可以看到q的分布越接近p(q分布越拟合p),那 么散度值越小,即损失值越小。因为对数函数是凸函数,所以KL散度的值为非 负数。但是,KL散度不是对称的,并且KL散度不满足三角不等式。
其次,介绍一下JS散度。JS散度度量了两个概率分布的相似度,是基于 KL散度的变体,它解决了KL散度非对称的问题。一般地,JS散度是对称的, 其取值是0到1之间,适合于具有一定重合度的两个概率分布的相似度度量。JS 散度计算公式为:
在本发明实施例中,假设人员聚类编号A的概率分布为p,人员聚类编号B 的概率分布为q,通过上述JS散度计算公式,可以得出人员聚类编号A和人员 聚类编号B的轨迹特征相似度。具体的,令
具体实现时,可以只选取具有多个时空单元重合度的两个人员聚类编号对 应的空间轨迹进行相似度计算,从而大幅降低计算量。
S304,合并人员聚类编号。
当两个人员聚类编号的空间轨迹相似度达到一定的阈值,可以把两个人员 聚类编号统一修改为较小的人员聚类编号,从而完成子类档案的合并。
图4为本发明实施例提供的一种人脸聚类子类合并方法的实施例四的流程 示意图,如图4所示,本实施例提供的人脸聚类子类合并方法可以包括:
S401,选择特征。
具体的,选择每个待聚类人脸图像对应的摄像头编号、拍摄时间戳和人员 聚类编号(即上文中的子类编号)这三个特征,用于描述人员活动轨迹特征。
S402,构造时空单元。
具体的,获取各待聚类人脸图像对应的摄像头编号、拍摄的星期和拍摄小 时这三个维度的数据,并将这三个维度的数据关联后作为时空单元。
S403,计算各人员聚类编号的概率分布。
S404,获取人员聚类编号i的概率分布。
S405,获取人员聚类编号j的概率分布(i不等于j)。
S406,判断人员聚类编号i和j的时空单元重合度是否大于第二预设阈值。
若是,则执行S407;若否,则执行S409。
S407,计算并判断人员聚类编号i和j的概率分布相似度是否大于第一预设 阈值。
若是,则执行S408;若否,则执行S409。
S408,合并人员聚类编号i和j。
S409,令j=j+1。
令j=j+1后,返回执行S405。
图5为本发明实施例提供的一种人脸聚类子类合并装置的结构示意图,如 图5所示,该人脸聚类子类合并装置50可以包括:
获取模块510,用于获取目标时间段内、目标区域范围内的多个待聚类人脸 图像,并通过预设人脸聚类算法得到各待聚类人脸图像的子类编号。
提取模块520,可以用于提取各待聚类人脸图像的时空单元,时空单元包括 各待聚类人脸图像对应的摄像头编号和拍摄时间戳。
关联模块530,可以用于将各待聚类人脸图像的子类编号和各待聚类人脸图 像的时空单元进行关联,得到各待聚类人脸图像的时空轨迹特征,其中,时空 轨迹特征用于描述待聚类人脸图像对应人员的时空轨迹。
第一计算模块540,可以用于根据各待聚类人脸图像的时空轨迹特征,计算 各子类编号的时空轨迹特征概率分布。
第二计算模块550,可以用于根据时空轨迹特征概率分布,通过预设相似度 公式,计算两个子类编号之间的概率分布相似度。
合并模块560,可以用于若概率分布相似度大于第一预设阈值,则合并两个 子类编号。
本发明实施例提供的人脸聚类子类合并装置,通过获取模块,获取目标时 间段内、目标区域范围内的多个待聚类人脸图像,并通过预设人脸聚类算法得 到各待聚类人脸图像的子类编号;通过提取模块,提取各待聚类人脸图像的时 空单元,时空单元包括各待聚类人脸图像对应的摄像头编号和拍摄时间戳;通 过关联模块,将各待聚类人脸图像的子类编号和各待聚类人脸图像的时空单元 进行关联,得到各待聚类人脸图像的时空轨迹特征,其中,时空轨迹特征用于 描述待聚类人脸图像对应人员的时空轨迹;通过第一计算模块,根据各待聚类 人脸图像的时空轨迹特征,计算各子类编号的时空轨迹特征概率分布;通过第 二计算模块,根据时空轨迹特征概率分布,通过预设相似度公式,计算两个子 类编号之间的概率分布相似度;通过合并模块,若概率分布相似度大于第一预 设阈值,则合并两个子类编号。通过人员时空轨迹特征可以补充数据的维度, 并且通过一定周期的时空轨迹特征的统计规律,可以保证每个子类中的各个人 脸特征是高内聚的,从而提高了人脸聚类的准确度。
可选的,上述合并模块560,可以具体用于将两个子类编号合并为相同的子 类编号。
可选的,上述第一计算模块540,可以具体用于统计各子类编号对应人员在 每个时空单元中出现的第一次数,并统计各子类编号对应人员在所有时空单元 中出现的第二次数;将第一次数与第二次数的比值作为各子类编号对应人员在 每个时空单元中出现的概率;将各子类编号对应人员在每个时空单元中出现的 概率,作为各子类编号的时空轨迹特征概率分布。
可选的,上述装置还可以包括第三计算模块(图中未示出),可以用于计算 两个子类编号所对应的多个时空单元的重合度;若重合度大于第二预设阈值, 则计算两个子类编号的轨迹特征相似度。
可选的,上述预设相似度公式可以为JS散度公式。
可选的,上述拍摄时间戳可以以拍摄星期和拍摄小时进行度量。
另外,相应于上述实施例所提供的人脸聚类子类合并方法,本发明实施例 还提供了一种电子设备,该电子设备可以包括:存储器,用于存储程序;处理 器,用于通过执行存储器存储的程序以实现本发明实施例提供的人脸聚类子类 合并方法的所有步骤。
另外,相应于上述实施例所提供的人脸聚类子类合并方法,本发明实施例 还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机 执行指令,所述计算机执行指令被处理器执行时实现本发明实施例的人脸聚类 子类合并方法的所有步骤。
本领域技术人员可以理解,上述实施方式中各种方法的全部或部分功能可 以通过硬件的方式实现,也可以通过计算机程序的方式实现。当上述实施方式 中全部或部分功能通过计算机程序的方式实现时,该程序可以存储于一计算机 可读存储介质中,存储介质可以包括:只读存储器、随机存储器、磁盘、光盘、 硬盘等,通过计算机执行该程序以实现上述功能。例如,将程序存储在设备的 存储器中,当通过处理器执行存储器中程序,即可实现上述全部或部分功能。 另外,当上述实施方式中全部或部分功能通过计算机程序的方式实现时,该程 序也可以存储在服务器、另一计算机、磁盘、光盘、闪存盘或移动硬盘等存储 介质中,通过下载或复制保存到本地设备的存储器中,或对本地设备的系统进 行版本更新,当通过处理器执行存储器中的程序时,即可实现上述实施方式中 全部或部分功能。
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不 用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想, 还可以做出若干简单推演、变形或替换。