武术敏捷度的训练设备
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及武术训练装置技术领域,特别涉及一种武术敏捷度的训练设备。
背景技术
中国武术文化是一种朴素的传统体育文化,是中国文化的一个组成部分,它在极为丰富多彩的理论和技术中反映出较为深刻的中国古代哲学思想和高尚文明,体现了质朴的民族精神和智慧,是中国传统文化的一种载体。
中国武术以民间拳种为主,它集技击和体用为一身,对武术运动员自身的敏捷度要求较高,因此在学习中国武术的过程中常常需要对武术运动员的敏捷度进行训练,在传统武术训练方法中便有利用梅花桩来对武术运动员的敏捷度、协调性以及稳定性进行训练的方法。
随着科技的发展,一些自动化武术训练器械也被发明出来并逐渐被应用到武术运动员的日常武术训练中,如公告号为CN109675281B的中国发明专利,公开了一种具有主动进攻能力的调节式武术训练桩及其训练方法,该具有主动进攻能力的调节式武术训练桩,包括承载方柱、限位板、承载架、控制器、无线信号接收器、显示屏、控制面板、延展机构、缓冲支撑腿、接电插口,所述限位板设置在承载方柱内腔的正面,承载架背面的一端固定连接在承载方柱内壁背面的底部,控制器底部的一端固定连接在承载架顶部的背面。该具有主动进攻能力的调节式武术训练桩,通过无序伸出五个受力装置接受击打,调整不同的伸出速率,达到锻炼武术、训练身体敏捷度的效果。然而该装置无法针对武术运动员的身法进行训练,存在功能性单一的缺陷。
发明内容
针对现有技术中存在的功能性单一的技术问题,本发明实施例提供了一种武术敏捷度的训练设备,包含:上层承载板、承载平台、中层承载板、下层承载板、若干个承载立柱、步法训练模块与身法训练模块;
上层承载板为圆盘状;
承载平台嵌设于上层承载板中,承载平台的顶部暴露于上层承载板的顶部表面,承载平台的底部暴露于上层承载板的底部表面;
若干个承载立柱固定设置在上层承载板的底部,任一个承载立柱垂直于上层承载板,若干个承载立柱围绕上层承载板的中心轴圆周阵列分布;
下层承载板固定设置在若干个承载立柱的底部,下层承载板平行于上层承载板;
中层承载板固定设置在若干个承载立柱上,中层承载板位于上层承载板与下层承载板之间;
步法训练模块设置在承载平台与中层承载板上,步法训练模块与外部的控制设备电性连接,用于训练武术运动员的步法技巧;
身法训练模块设置在上层承载板、中层承载板以及下层承载板上,身法训练模块与控制设备电性连接,用于训练武术运动员的身法技巧。
进一步,步法训练模块包含:若干个装配槽、若干个步法训练组件与若干个信号灯带;
若干个装配槽开设在承载平台的顶部,装配槽的径向截面形状为六边形,若干个装配槽呈蜂窝状排列;
若干个步法训练组件设置在承载平台与中层承载板上,若干个步法训练组件分别与若干个装配槽相连,若干个步法训练组件与控制设备电性连接,用于训练武术运动员的步法技巧;
若干个信号灯带嵌设于承载平台中,若干个信号灯带暴露于承载平台的顶部表面,若干个信号灯带分别与若干个装配槽的位置相匹配,任一条信号灯带围绕对应的装配槽的顶部槽口布置,若干个信号灯带与控制设备电性连接。
进一步,步法训练组件包含:盖板、若干个通孔、托盘、若干个第一球型槽、若干个第一滚球、若干个第一弹簧、托板、拉绳、螺孔、顶升电机、套筒与顶升构件;
盖板固定盖设于装配槽的顶部槽口处;
若干个通孔开设在盖板的顶部,任一通孔贯穿盖板与装配槽的内腔连通,若干个通孔在盖板上均匀分布;
托盘轴向活动设置在装配槽的内腔中,托盘与装配槽的径向截面形状相匹配,托盘位于盖板的下侧;
若干个第一球型槽均匀开设在托盘的顶部表面,若干个第一球型槽与若干个通孔的位置一一对应;
若干个第一滚球分别转动设置在若干个第一球型槽的内腔中,第一滚球与第一球型槽的形状相匹配,当托盘的顶部与盖板的底部抵接时,若干个第一滚球分别通过若干个通孔凸出于盖板的顶部表面;
托板轴向活动设置在装配槽的内腔中,托板与装配槽的径向截面形状相匹配,托板位于托盘的下侧;
若干个第一弹簧设置在托板的顶部,若干个第一弹簧与托盘的底部相连,用于支撑托盘;
拉绳的两端分别与托板的顶部以及托盘的底部固定连接;
螺孔开设在承载平台的底部表面,螺孔贯穿承载平台的外壁与对应的装配槽的内腔底部连通;
顶升电机固定设置在中层承载板的顶部,顶升电机与控制设备电性连接;
套筒固定设置在顶升电机的执行端,套筒的顶部采用开放式设计,套筒的内腔径向截面形状为矩形;
顶升构件沿套筒的轴向活动插设于套筒的内腔中,顶升构件的底部与套筒的内腔形状相匹配,顶升构件的顶部穿过螺孔与托板的底部转动连接,顶升构件与螺孔螺纹连接。
进一步,顶升构件包含:驱动段与连接段;
连接段为圆柱体,连接段的顶部与托板的底部转动连接,连接段与螺孔的形状相匹配,连接段与螺孔螺纹连接;
驱动段固定设置在连接段的底部,驱动段与连接段的中心轴相同,驱动段与套筒的内腔形状相匹配,用于带动连接段转动。
进一步,身法训练模块包含:承载圆环、若干个连接立柱、齿圈、若干个第二球型槽、若干个第二滚球、调姿组件与若干个身法训练组件;
承载圆环套设在上层承载板上,承载圆环与上层承载板的中心轴相同,承载圆环与上层承载板转动连接;
若干个连接立柱固定设置在承载圆环的底部,任一个连接立柱垂直于承载圆环,若干个连接立柱围绕承载圆环的中心轴圆周阵列分布;
齿圈固定设置在若干个连接立柱的底部,齿圈平行于承载圆环,齿圈与承载圆环的中心轴相同,齿圈位于下层承载板与承载圆环之间;
若干个第二球型槽开设在齿圈的底部,若干个第二球型槽围绕齿圈的中心轴圆周阵列分布;
若干个第二滚球分别转动设置在若干个第二球型槽的内腔中,第二滚球与第二球型槽的形状相匹配,若干个第二滚球与下层承载板的顶部表面抵接;
调姿组件设置在中层承载板以及下层承载板上,调姿组件与齿圈相连,调姿组件与控制设备电性连接,用于驱动齿圈转动;
若干个身法训练组件固定设置在上层承载板、承载圆环上,若干个身法训练组件分别与控制设备电性连接,若干个身法训练组件围绕承载平台圆周阵列分布,用于对武术运动员进行身法技巧训练。
进一步,调姿组件包含:主动齿轮、若干个从动齿轮与调姿电机;
主动齿轮转动设置在中层承载板的底部,主动齿轮与齿圈的中心轴相同;
若干个从动齿轮分别转动设置在中层承载板的底部,若干个从动齿轮围绕主动齿轮圆周阵列分布,任一个从动齿轮与主动齿轮以及齿圈相啮合,用于带动齿圈转动;
调姿电机固定设置在下层承载板的顶部,调姿电机的执行端与主动齿轮相连,用于驱动主动齿轮转动。
进一步,身法训练组件包含:一对定位弹射机构、蓄力弹射机构、一对弹力绳、牵引绳、撞击球与摄像头;
一对定位弹射机构固定设置在上层承载板的顶部,一对定位弹射机构分列于承载平台的两侧,一对定位弹射机构与控制设备电性连接;
蓄力弹射机构固定设置在承载圆环的顶部,蓄力弹射机构与控制设备电性连接;
撞击球设置在上层承载板的上侧;
牵引绳的一端与蓄力弹射机构相连,牵引绳的另一端与撞击球固定连接;
一对弹力绳的一端分别与一对定位弹射机构相连,一对弹力绳的另一端与撞击球固定连接;
摄像头设置在定位弹射机构上,摄像头与控制设备电性连接,用于捕捉武术运动员的位置信息。
进一步,蓄力弹射机构包含:承载框体、导向立柱、一对链轮、传动链、升降电机、安装顶板、安装底板、支撑板、传动轴、蓄力电机、工字轮、压板、第二弹簧、电动伸缩杆、安装盘、若干个顶升立柱、若干个第三球型槽、若干个第三滚球;
承载框体固定设置在承载圆环的顶部,承载框体垂直于承载圆环设置;
导向立柱固定设置在承载框体的内腔中,导向立柱沿承载框体的轴向设置;
安装顶板上开设有第一导向孔,安装顶板通过第一导向孔套设在导向立柱上;
安装底板上开设有第二导向孔,安装底板通过第二导向孔套设在导向立柱上,安装底板位于安装顶板的下侧;
传动轴设置在安装顶板与安装底板之间,传动轴的顶部与安装顶板转动连接,传动轴的底部与安装底板转动连接,传动轴的上半段部分为圆柱体,传动轴的下半段部分为四棱柱体;
支撑板设置在安装顶板与安装底板之间,支撑板的顶部与安装顶板固定连接,支撑板的底部与安装底板固定连接,支撑板位于传动轴与导向立柱之间;
工字轮的中心轴处开设有装配孔,工字轮通过装配孔套设在传动轴上,工字轮与牵引绳的一端固定连接,装配孔的上半段部分与传动轴的上半段部分的形状相匹配,装配孔的下半段部分与传动轴的下半段部分的形状相匹配;
压板套设在传动轴上,压板与工字轮的顶部抵接;
第二弹簧套设在传动轴上,第二弹簧的一端与安装顶板相连,第二弹簧的另一端与压板相连;
蓄力电机固定设置在安装顶板的顶部,蓄力电机的执行端贯穿安装顶板与传动轴的顶部相连,蓄力电机与控制设备电性连接,用于驱动传动轴转动;
电动伸缩杆固定设置在安装底板的底部,电动伸缩杆与控制设备电性连接;
安装盘设置在电动伸缩杆的执行端;
若干个顶升立柱固定设置在安装盘的顶部,任一顶升立柱垂直于安装盘设置,顶升立柱的顶部贯穿安装底板凸出于安装底板的顶部表面;
若干个第三球型槽分别开设在若干个顶升立柱的顶部;
若干个第三滚球分别转动设置在若干个第三球型槽的内腔中,第三滚球与第三球型槽的形状相匹配,若干个第三滚球与工字轮的底部表面抵接;
其中一个链轮转动设置在承载框体的内腔底部,另一个链轮转动设置在承载框体的内腔顶部;
传动链套设在一对链轮上,传动链与一对链轮啮合,传动链与安装顶板、安装底板固定连接,传动链的传动方向平行于导向立柱的轴向,用于带动安装顶板、安装底板进行升降;
升降电机固定设置在承载框体上,升降电机的执行端与其中一个链轮相连,升降电机与控制设备电性连接,用于驱动链轮转动。
进一步,定位弹射机构包含:螺柱、承载壳体、装配缺口、定位电机、螺母与万向节;
承载壳体设置在上层承载板的顶部表面,承载壳体的底部采用开放式设计,承载壳体的底部与上层承载板固定连接,承载壳体垂直于上层承载板,摄像头固定设置在承载壳体的顶部;
装配缺口开设在承载壳体的曲面侧壁上,装配缺口贯穿承载壳体的外壁与承载壳体的内腔连通,装配缺口沿承载壳体的轴向设置;
螺柱设置在上层承载板的顶部表面,螺柱的底部与上层承载板的顶部转动连接,螺柱与承载壳体的中心轴相同;
螺母套设在螺柱上,螺母与螺柱螺纹连接;
万向节固定设置在螺母的侧壁上,万向节穿过装配缺口凸出于承载壳体的外表面,万向节与弹力绳的一端固定连接;
定位电机固定设置在上层承载板的底部,定位电机的执行端贯穿上层承载板与螺柱相连,定位电机与控制设备电性连接,用于驱动螺柱转动。
进一步,撞击球包含:球皮、内胆、缓冲填充物与接头;
球皮的外表面与牵引绳的另一端、弹力绳的另一端固定连接;
内胆设置在球皮的内腔中;
接头依次贯穿球皮以及内胆的外壁与内胆的内腔连通,接头与球皮的外壁以及内胆的外壁固定连接,接头凸出于球皮的外表面;
缓冲填充物设置在球皮的内腔中。
根据本发明实施例的武术敏捷度的训练设备,具备如下有益效果:本装置通过步法训练模块以及身法训练模块相配合,能够同时针对武术运动员的身法技巧以及步法技巧进行训练,以达到提升武术运动员的敏捷度以及移动稳定性的目的,解决了现有技术中存在的功能性单一的缺陷,具备实用性强的特点。
要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
附图说明
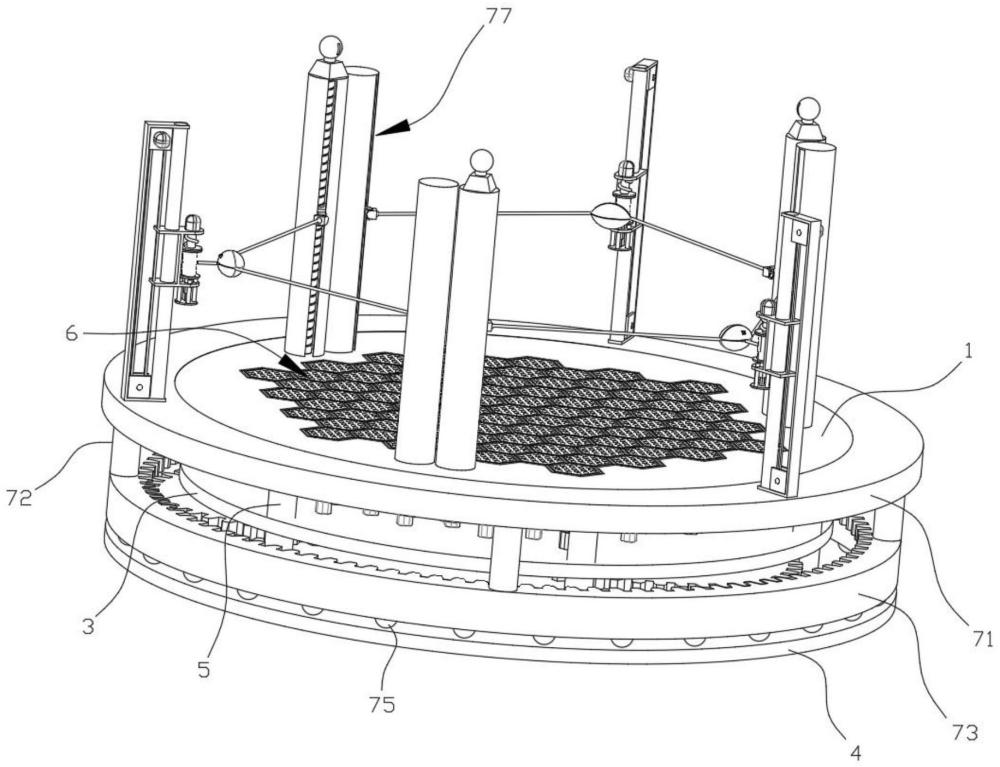
图1为根据本发明实施例的立体图;
图2为根据本发明实施例的步法训练模块的立体图;
图3为根据本发明实施例的步法训练模块的结构分解图;
图4为图3中A区域的局部放大示意图;
图5为图3中B区域的局部放大示意图;
图6为根据本发明实施例的步法训练组件的装配示意图;
图7为根据本发明实施例的调姿组件的结构分解图;
图8为根据本发明实施例的身法训练组件的装配示意图;
图9为根据本发明实施例的蓄力弹射机构的结构分解图;
图10为图9中C区域的局部放大示意图;
图11为根据本发明实施例的定位弹射机构的结构分解图;
图12为根据本发明实施例的撞击球的内部结构示意图。
具体实施方式
以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明,此外,在全部实施例中,相同的附图标号表示相同的元件。
首先,将结合图1~12描述根据本发明实施例的武术敏捷度的训练设备,用于武术运动员日常训练使用,其应用场景广阔。
如图1、2所示,本发明实施例的武术敏捷度的训练设备,包含:上层承载板1、承载平台2、中层承载板3、下层承载板4、若干个承载立柱5、步法训练模块6与身法训练模块。
具体地,如图1、2所示,上层承载板1为圆盘状;承载平台2嵌设于上层承载板1中,承载平台2的顶部暴露于上层承载板1的顶部表面,承载平台2的底部暴露于上层承载板1的底部表面;若干个承载立柱5固定设置在上层承载板1的底部,任一个承载立柱5垂直于上层承载板1,若干个承载立柱5围绕上层承载板1的中心轴圆周阵列分布;下层承载板4固定设置在若干个承载立柱5的底部,下层承载板4平行于上层承载板1;中层承载板3固定设置在若干个承载立柱5上,中层承载板3位于上层承载板1与下层承载板4之间;步法训练模块6设置在承载平台2与中层承载板3上,步法训练模块6与外部的控制设备电性连接,用于训练武术运动员的步法技巧。
进一步,如图1~6所示,步法训练模块6包含:若干个装配槽61、若干个步法训练组件与若干个信号灯带62;若干个装配槽61开设在承载平台2的顶部,装配槽61的径向截面形状为六边形,若干个装配槽61呈蜂窝状排列;若干个步法训练组件设置在承载平台2与中层承载板3上,若干个步法训练组件分别与若干个装配槽61相连,若干个步法训练组件与控制设备电性连接,用于训练武术运动员的步法技巧;若干个信号灯带62嵌设于承载平台2中,若干个信号灯带62暴露于承载平台2的顶部表面,若干个信号灯带62分别与若干个装配槽61的位置相匹配,任一条信号灯带62围绕对应的装配槽61的顶部槽口布置,若干个信号灯带62与控制设备电性连接。
进一步,如图1~6所示,步法训练组件包含:盖板631、若干个通孔6311、托盘632、若干个第一球型槽633、若干个第一滚球634、若干个第一弹簧635、托板636、拉绳637、螺孔(图上未示出)、顶升电机638、套筒639与顶升构件640;盖板631固定盖设于装配槽61的顶部槽口处;若干个通孔6311开设在盖板631的顶部,任一通孔6311贯穿盖板631与装配槽61的内腔连通,若干个通孔6311在盖板631上均匀分布;托盘632轴向活动设置在装配槽61的内腔中,托盘632与装配槽61的径向截面形状相匹配,托盘632位于盖板631的下侧;若干个第一球型槽633均匀开设在托盘632的顶部表面,若干个第一球型槽633与若干个通孔6311的位置一一对应;若干个第一滚球634分别转动设置在若干个第一球型槽633的内腔中,第一滚球634与第一球型槽633的形状相匹配,当托盘632的顶部与盖板631的底部抵接时,若干个第一滚球634分别通过若干个通孔6311凸出于盖板631的顶部表面;托板636轴向活动设置在装配槽61的内腔中,托板636与装配槽61的径向截面形状相匹配,托板636位于托盘632的下侧;若干个第一弹簧635设置在托板636的顶部,若干个第一弹簧635与托盘632的底部相连,用于支撑托盘632;拉绳637的两端分别与托板636的顶部以及托盘632的底部固定连接;螺孔开设在承载平台2的底部表面,螺孔贯穿承载平台2的外壁与对应的装配槽61的内腔底部连通;顶升电机638固定设置在中层承载板3的顶部,顶升电机638与控制设备电性连接;套筒639固定设置在顶升电机638的执行端,套筒639的顶部采用开放式设计,套筒639的内腔径向截面形状为矩形;顶升构件640沿套筒639的轴向活动插设于套筒639的内腔中,顶升构件640的底部与套筒639的内腔形状相匹配,顶升构件640的顶部穿过螺孔与托板636的底部转动连接,顶升构件640与螺孔螺纹连接。
进一步,如图1~6所示,顶升构件640包含:驱动段6401与连接段6402;连接段6402为圆柱体,连接段6402的顶部与托板636的底部转动连接,连接段6402与螺孔的形状相匹配,连接段6402与螺孔螺纹连接;驱动段6401固定设置在连接段6402的底部,驱动段6401与连接段6402的中心轴相同,驱动段6401与套筒639的内腔形状相匹配,用于带动连接段6402转动。
本装置的步法训练模块6包含如下两种训练模式:
训练模式一,控制设备首先控制所有步法训练组件的顶升电机638启动,所有步法训练组件的顶升电机638分别驱动对应的套筒639旋转,进而使套筒639带动顶升构件640正向转动,顶升构件640在转动的过程中,由于顶升构件640的连接段6402的顶端穿过螺孔与托板636转动连接且顶升构件640的连接段6402与螺孔螺纹连接,因此在顶升构件640正向转动的过程中,顶升构件640会将托板636顶起,托板636将若干个第一弹簧635、拉绳637、托盘632以及若干个第一滚球634托起,使托盘632的顶部表面与盖板631的底部表面抵接,若干个第一滚球634分别通过开设在盖板631上的若干通孔6311凸出于盖板631的顶部表面,直至若干个第一弹簧635被托板636压缩到极致将托盘632顶死,所有步法训练组件的顶升电机638才停止运行,使武术运动员踩到凸出盖板631顶部表面的第一滚球634时容易被滑倒;然后,控制设备结合武术运动员所练习的拳种的步法路数,定时开放某两个步法训练组件,当步法训练组件被开放时,控制设备控制顶升电机638启动,顶升电机638驱动套筒639反向旋转,套筒639带动顶升构件640反向旋转,由于顶升构件640的连接段6402的顶端穿过螺孔与托板636转动连接且顶升构件640的连接段6402与螺孔螺纹连接,因此在顶升构件640反向转动的过程中,顶升构件640会带动托板636下降,直至托板636下降一定距离后,若干个第一弹簧635完全恢复形变,拉绳637被托板636牵动,托板636通过拉绳637拉动托盘632下降一定距离,使若干个第一滚球634缩回装配槽61的内腔中,顶升电机638停止运行,或者在托板636下降一定距离后,第一弹簧635未完全恢复形变,第一弹簧635的弹力降低到第一值,但第一滚球634仍然处于凸出于盖板631的顶部表面的位置,在此状态下,当武术运动员的脚部向处于开放状态的身法训练组件77的第一滚球634施加一定的压力时,第一弹簧635会被压缩,使第一滚球634缩回至装配槽61的内腔中;在步法训练组件进入开放状态后,位置与之对应的信号灯带62也会随之亮起,对武术运动员进行位置提示,并且控制设备会根据处于开放状态的步法训练组件的第一滚球634是否凸出盖板631的顶部表面来通过信号灯带62表征出两种颜色,以达到对武术运动员进行提示的目的;本装置通过定时开放某两组步法训练组件的方式来对武术运动员的敏捷度进行训练,并且本装置通过步法训练模块6的训练模式一将武术运动员所练习的武术拳种的步法路数融入到武术运动员的敏捷度训练中,使武术运动员在进行日常的敏捷度训练时能够加深对其所练习的武术拳种的步法路数的记忆,增强了本装置的实用性。
训练模式二,控制设备控制所有步法训练组件的顶升电机638启动,所有步法训练组件的顶升电机638分别驱动对应的套筒639旋转,进而使套筒639带动顶升构件640正向转动,顶升构件640在转动的过程中,由于顶升构件640的连接段6402的顶端穿过螺孔与托板636转动连接且顶升构件640的连接段6402与螺孔螺纹连接,因此在顶升构件640正向转动的过程中,顶升构件640会将托板636顶起,托板636将若干个第一弹簧635、拉绳637、托盘632以及若干个第一滚球634托起,使托盘632的顶部表面与盖板631的底部表面抵接,若干个第一滚球634分别通过开设在盖板631上的若干通孔6311凸出于盖板631的顶部表面,在此模式下,第一弹簧635被托板636压缩而发生一定程度的弹性形变,使托板636与托盘632之间的弹力保持在一定值,当武术运动员的脚部向第一滚球634施加一定的压力时,第一弹簧635会被压缩,使第一滚球634缩回至装配槽61的内腔中;在步法训练模块6的训练模式二的模式下,武术运动员可以在承载平台2上自由移动,武术运动员在移动的过程中,在武术运动员的脚步落地时需要武术运动员的脚步适当发力将对应位置的第一滚球634压下去,否则武术运动员在移动时容易被第一滚球634滑倒,本装置通过步法训练模块6的训练模式二可以针对武术运动员的脚步发力技巧进行训练,以达到增强武术运动员移动稳定性的目的,进一步增强了本装置的实用性。
具体地,如图1、2所示,身法训练模块设置在上层承载板1、中层承载板3以及下层承载板4上,身法训练模块与控制设备电性连接,用于训练武术运动员的身法技巧。
进一步,如图1、2、7所示,身法训练模块包含:承载圆环71、若干个连接立柱72、齿圈73、若干个第二球型槽74、若干个第二滚球75、调姿组件与若干个身法训练组件77;承载圆环71套设在上层承载板1上,承载圆环71与上层承载板1的中心轴相同,承载圆环71与上层承载板1转动连接;若干个连接立柱72固定设置在承载圆环71的底部,任一个连接立柱72垂直于承载圆环71,若干个连接立柱72围绕承载圆环71的中心轴圆周阵列分布;齿圈73固定设置在若干个连接立柱72的底部,齿圈73平行于承载圆环71,齿圈73与承载圆环71的中心轴相同,齿圈73位于下层承载板4与承载圆环71之间;若干个第二球型槽74开设在齿圈73的底部,若干个第二球型槽74围绕齿圈73的中心轴圆周阵列分布;若干个第二滚球75分别转动设置在若干个第二球型槽74的内腔中,第二滚球75与第二球型槽74的形状相匹配,若干个第二滚球75与下层承载板4的顶部表面抵接;调姿组件设置在中层承载板3以及下层承载板4上,调姿组件与齿圈73相连,调姿组件与控制设备电性连接,用于驱动齿圈73转动;若干个身法训练组件77固定设置在上层承载板1、承载圆环71上,若干个身法训练组件77分别与控制设备电性连接,若干个身法训练组件77围绕承载平台2圆周阵列分布,用于对武术运动员进行身法技巧训练。
进一步,如图1、2、7所示,调姿组件包含:主动齿轮761、若干个从动齿轮762与调姿电机763;主动齿轮761转动设置在中层承载板3的底部,主动齿轮761与齿圈73的中心轴相同;若干个从动齿轮762分别转动设置在中层承载板3的底部,若干个从动齿轮762围绕主动齿轮761圆周阵列分布,任一个从动齿轮762与主动齿轮761以及齿圈73相啮合,用于带动齿圈73转动;调姿电机763固定设置在下层承载板4的顶部,调姿电机763的执行端与主动齿轮761相连,用于驱动主动齿轮761转动。
进一步,如图1、2、7、8所示,身法训练组件77包含:一对定位弹射机构772、蓄力弹射机构771、一对弹力绳773、牵引绳774、撞击球776与摄像头775;一对定位弹射机构772固定设置在上层承载板1的顶部,一对定位弹射机构772分列于承载平台2的两侧,一对定位弹射机构772与控制设备电性连接;蓄力弹射机构771固定设置在承载圆环71的顶部,蓄力弹射机构771与控制设备电性连接;撞击球776设置在上层承载板1的上侧;牵引绳774的一端与蓄力弹射机构771相连,牵引绳774的另一端与撞击球776固定连接;一对弹力绳773的一端分别与一对定位弹射机构772相连,一对弹力绳773的另一端与撞击球776固定连接;摄像头775设置在定位弹射机构772上,摄像头775与控制设备电性连接,用于捕捉武术运动员的位置信息。
进一步,如图1、2、7~10所示,蓄力弹射机构771包含:承载框体7711、导向立柱7712、一对链轮7713、传动链7714、升降电机7715、安装顶板7716、安装底板7717、支撑板7718、传动轴7719、蓄力电机7720、工字轮7721、压板7722、第二弹簧7723、电动伸缩杆7724、安装盘7725、若干个顶升立柱7726、若干个第三球型槽7727、若干个第三滚球7728;承载框体7711固定设置在承载圆环71的顶部,承载框体7711垂直于承载圆环71设置;导向立柱7712固定设置在承载框体7711的内腔中,导向立柱7712沿承载框体7711的轴向设置;安装顶板7716上开设有第一导向孔77161,安装顶板7716通过第一导向孔77161套设在导向立柱7712上;安装底板7717上开设有第二导向孔77171,安装底板7717通过第二导向孔77171套设在导向立柱7712上,安装底板7717位于安装顶板7716的下侧;传动轴7719设置在安装顶板7716与安装底板7717之间,传动轴7719的顶部与安装顶板7716转动连接,传动轴7719的底部与安装底板7717转动连接,传动轴7719的上半段部分为圆柱体,传动轴7719的下半段部分为四棱柱体;支撑板7718设置在安装顶板7716与安装底板7717之间,支撑板7718的顶部与安装顶板7716固定连接,支撑板7718的底部与安装底板7717固定连接,支撑板7718位于传动轴7719与导向立柱7712之间;工字轮7721的中心轴处开设有装配孔77211,工字轮7721通过装配孔77211套设在传动轴7719上,工字轮7721与牵引绳774的一端固定连接,装配孔77211的上半段部分与传动轴7719的上半段部分的形状相匹配,装配孔77211的下半段部分与传动轴7719的下半段部分的形状相匹配;压板7722套设在传动轴7719上,压板7722与工字轮7721的顶部抵接;第二弹簧7723套设在传动轴7719上,第二弹簧7723的一端与安装顶板7716相连,第二弹簧7723的另一端与压板7722相连;蓄力电机7720固定设置在安装顶板7716的顶部,蓄力电机7720的执行端贯穿安装顶板7716与传动轴7719的顶部相连,蓄力电机7720与控制设备电性连接,用于驱动传动轴7719转动;电动伸缩杆7724固定设置在安装底板7717的底部,电动伸缩杆7724与控制设备电性连接;安装盘7725设置在电动伸缩杆7724的执行端;若干个顶升立柱7726固定设置在安装盘7725的顶部,任一顶升立柱7726垂直于安装盘7725设置,顶升立柱7726的顶部贯穿安装底板7717凸出于安装底板7717的顶部表面;若干个第三球型槽7727分别开设在若干个顶升立柱7726的顶部;若干个第三滚球7728分别转动设置在若干个第三球型槽7727的内腔中,第三滚球7728与第三球型槽7727的形状相匹配,若干个第三滚球7728与工字轮7721的底部表面抵接;其中一个链轮7713转动设置在承载框体7711的内腔底部,另一个链轮7713转动设置在承载框体7711的内腔顶部;传动链7714套设在一对链轮7713上,传动链7714与一对链轮7713啮合,传动链7714与安装顶板7716、安装底板7717固定连接,传动链7714的传动方向平行于导向立柱7712的轴向,用于带动安装顶板7716、安装底板7717进行升降;升降电机7715固定设置在承载框体7711上,升降电机7715的执行端与其中一个链轮7713相连,升降电机7715与控制设备电性连接,用于驱动链轮7713转动。
进一步,如图1、2、7、8、11所示,定位弹射机构772包含:螺柱7721、承载壳体7722、装配缺口7723、定位电机7724、螺母7725与万向节7726;承载壳体7722设置在上层承载板1的顶部表面,承载壳体7722的底部采用开放式设计,承载壳体7722的底部与上层承载板1固定连接,承载壳体7722垂直于上层承载板1,摄像头775固定设置在承载壳体7722的顶部;装配缺口7723开设在承载壳体7722的曲面侧壁上,装配缺口7723贯穿承载壳体7722的外壁与承载壳体7722的内腔连通,装配缺口7723沿承载壳体7722的轴向设置;螺柱7721设置在上层承载板1的顶部表面,螺柱7721的底部与上层承载板1的顶部转动连接,螺柱7721与承载壳体7722的中心轴相同;螺母7725套设在螺柱7721上,螺母7725与螺柱7721螺纹连接;万向节7726固定设置在螺母7725的侧壁上,万向节7726穿过装配缺口7723凸出于承载壳体7722的外表面,万向节7726与弹力绳773的一端固定连接;定位电机7724固定设置在上层承载板1的底部,定位电机7724的执行端贯穿上层承载板1与螺柱7721相连,定位电机7724与控制设备电性连接,用于驱动螺柱7721转动。
进一步,如图1、2、7、8、11、12所示,撞击球776包含:球皮7761、内胆7762、缓冲填充物7763与接头7764;球皮7761的外表面与牵引绳774的另一端、弹力绳773的另一端固定连接,球皮7761选用透气性良好且弹性差的材料缝制而成;内胆7762设置在球皮7761的内腔中;接头7764依次贯穿球皮7761以及内胆7762的外壁与内胆7762的内腔连通,接头7764与球皮7761的外壁以及内胆7762的外壁固定连接,接头7764凸出于球皮7761的外表面,内胆7762选用弹性良好且不透气的材料制成;缓冲填充物7763设置在球皮7761的内腔中。
本装置的身法训练模块工作原理如下:
控制设备通过定时击发某一个或多个蓄力弹射机构771,利用弹力绳773的弹力将撞击球776射出,对处于承载平台2上的武术运动员进行攻击,迫使武术运动员进行躲避或防御,以达到对武术运动员的敏捷度进行训练的目的,在撞击球776被射出后,蓄力弹射机构771可通过牵引绳774拉回撞击球776,对撞击球776进行蓄力;并且本装置还可以通过调节蓄力弹射机构771以及定位弹射机构772,来对撞击球776的射出角度进行调整。
本装置的蓄力弹射机构771的工作原理如下:
当蓄力弹射机构771对撞击球776进行蓄力时,蓄力电机7720驱动传动轴7719转动,使传动轴7719带动工字轮7721转动,工字轮7721在转动的过程中对牵引绳774进行卷绕,从而将撞击球776拉向工字轮7721,使一对弹力绳773被拉伸,发生弹性形变,进而完成撞击球776的蓄力,控制设备可以通过控制工字轮7721对牵引绳774的卷绕圈数来对弹力绳773的变形程度进行调节,进而对撞击球776蓄力的大小进行控制;在撞击球776完成蓄力后,电动伸缩杆7724驱动安装盘7725上升,使安装盘7725带动顶升立柱7726同步上升,顶升立柱7726通过第三滚球7728将工字轮7721顶升,工字轮7721带动压板7722同步上升,第二弹簧7723被压缩,直至装配孔77211的下半段部分与传动轴7719的下半段部分脱离,工字轮7721被释放,一对弹力绳773恢复形变驱动撞击球776射出,撞击球776被射出的过程中将牵引绳774拉出,带动工字轮7721在传动轴7719的连接段6402部分进行旋转;当蓄力弹射机构771对撞击球776进行再次蓄力时,电动伸缩杆7724驱动安装盘7725复位,进而带动设置在安装盘7725上的顶升立柱7726以及第三滚球7728复位,第二弹簧7723恢复形变,第二弹簧7723通过压板7722向工字轮7721施加压力,促使装配孔77211的下半部分腔体套设在传动轴7719的下半部分上;在蓄力弹射机构771对撞击球776进行蓄力的过程中,升降电机7715驱动其中一个链轮7713转动,其中一个链轮7713通过传动链7714的动力传动带动另一个链轮7713转动,在传动链7714进行动力传动的过程中,带动安装顶板7716、安装底板7717进行上升或下降,进而对撞击球776的射出角度进行调节,以达到控制设备根据摄像头775捕捉到的武术运动员的位置控制蓄力弹射机构771对武术运动员进行多角度攻击的目的;本装置通过蓄力弹射机构771来对武术运动员进行多角度攻击来针对武术运动员闪躲的敏捷度以及防御反应的敏捷度进行训练,进一步增强了本装置的实用性。
本装置的定位弹射机构772的工作原理如下:
在蓄力弹射机构771完成对撞击球776的蓄力之前,控制设备分别控制一对定位弹射机构772的定位电机7724启动,定位电机7724驱动螺柱7721转动,由于套设在螺柱7721上的螺母7725与螺柱7721螺纹连接且固定设置在螺母7725侧壁上的万向节7726通过装配缺口7723伸出于承载壳体7722的外表面,因此在螺柱7721转动的过程中,螺母7725会沿着螺柱7721的轴向滑动,带动万向节7726沿着装配缺口7723的轴向位移值某一高度,进而对撞击球776的射出角度进行调节,以达到控制设备根据摄像头775捕捉到的武术运动员的位置控制蓄力弹射机构771对武术运动员进行多角度攻击的目的;本装置通过定位弹射机构772来对武术运动员进行多角度攻击来针对武术运动员身体闪避的敏捷度以及防御反应的敏捷度进行训练,进一步增强了本装置的实用性。
本装置的调姿组件的工作原理如下:
在蓄力弹射机构771完成对撞击球776的蓄力之前,控制设备控制调姿电机763启动,调姿电机763驱动主动齿轮761转动,主动齿轮761通过与从动齿轮762啮合而带动从动齿轮762进行转动,从动齿轮762通过与齿圈73啮合而带动齿圈73进行转动,齿圈73通过连接立柱72与承载圆环71固定连接,进而带动承载圆环71进行转动,进而使承载圆环71带动蓄力弹射机构771进行位移,从而对撞击球776的射出角度进行调节,以达到控制设备根据摄像头775捕捉到的武术运动员的位置控制蓄力弹射机构771对武术运动员进行多角度攻击的目的;本装置通过调姿组件来对武术运动员进行多角度攻击来针对武术运动员闪躲的敏捷度以及防御反应的敏捷度进行训练,进一步增强了本装置的实用性。
同时本装置可以利用气泵或水泵通过接头7764向内胆7762中充入定量的气体或液体,来对撞击球776整体的质量进行调节,以达到对撞击球776的攻击力度以及射出速度进行调节的目的,并且当内胆7762在膨胀到一定程度时会对填充在球皮7761内腔中的缓冲填充物7763进行压缩,撞击球776的硬度也会随之发生变化,因此使用者可以通过调节充入至内胆7762的内腔中的气体或液体的量来对撞击球776的硬度进行调节,方便武术运动员根据自身身体素质情况利用本装置进行抗击打训练,进一步增强了本装置的实用性。
以上,参照图1~12描述了根据本发明实施例的武术敏捷度的训练设备,具备如下有益效果:本装置通过步法训练模块以及身法训练模块相配合,能够同时针对武术运动员的身法技巧以及步法技巧进行训练,以达到提升武术运动员的敏捷度以及移动稳定性的目的,解决了现有技术中存在的功能性单一的缺陷,具备实用性强的特点。
需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。