一种一体化电动多功能康复训练架
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于医疗康复设备技术领域,具体涉及一种一体化电动多功能康复站立训练架。
背景技术
脑卒中、脊髓损伤、下肢神经与软组织损伤、足踝关节及其周围结构损伤或术后等站立或运动功能障碍患者进行站立训练康复治疗是他们所渴求的,站立能力可以通过患者不懈努力的训练来恢复,这个时候有一个好的康复设备就显得尤为重要,可以使康复过程变得简单,也可预防改善骨质疏松、压疮、心肺功能降低等。
临床上常用踝足斜板站立架,但采用踝足斜板站立架训练时,需人工调整踝背伸角度,无法根据患者病情实时自动调整角度,此外,常用斜板站立架时间固定,不能根据人体运动学原理屈伸交替活动,过长的站立易致肌肉、肌腱疲劳,同时易刺激下肢后侧肌群肌张力增高。
发明内容
针对上述存在的不足,本发明根据人体踝关节运动学原理,通过控制面板可设定斜板站立屈伸活动角度、时间、频率,以及控制上支撑架的升降,从而提高患者训练效果。
本发明采用的技术方案是:
一种一体化电动多功能康复训练架,
包括底板和立架,所述底板上设置有脚踝训练组件、支撑板升降组件以及设置于支撑板升降组件上方的上支撑架,所述脚踝训练组件设置于底板上的安装槽内,且位于上支撑架下方,所述上支撑架的侧壁上设置有控制面板。
优选的,所述脚踝训练组件包括设置于底板上的安装槽内的第一安装座,所述第一安装座上设置有电动推杆,所述电动推杆的推杆端部设置有推拉连杆,所述推拉连杆的两端均铰接有第一支撑摇杆和第二支撑摇杆,所述第一支撑摇杆和第二支撑摇杆的端部分别与第一连杆和第二连杆铰接,所述第一连杆和第二连杆的一端分别铰接于第二安装座上,所述第一连杆和第二连杆的另一端分别铰接于脚支撑板下端面上的第三安装座上,所述脚支撑板随着第一连杆和第二连杆的旋转而产生角度变化。
优选的,所述电动推杆的底面设置有第一位移传感器,所述脚支撑板的底面设置有角度传感器且位于脚支撑板的中心位置,所述第一位移传感、角度传感器和电动推杆均与控制面板连接。
优选的,所述支撑板升降组件包括上撑杆,在底板与上撑杆之间设置有沿上撑杆长度方向错开布置的两个升降架,任一一个所述的升降架包括呈V形结构布置的两个第一升降杆和两个第二升降杆,两个所述第一升降杆下端与底板上的底座铰接,两个所述第二升降杆上端与上撑杆上的底座铰接,两个所述第一升降杆上端与两个第二升降杆下端铰接在同一销轴上的两端,所述销轴设置于水平连接杆的侧壁上的导向孔内,所述第一升降杆上铰接有第一连杆,所述第一连杆另一端与第二连杆通过同一销轴铰接在水平连接杆上,所述第二连接杆的另一端与第二升降杆铰接。
优选的,所述升降架中,第一升降杆与第二升降杆对称布置在水平连接杆的上、下两侧,所述第一连杆和第二连杆对称布置在水平连接杆的上、下两侧,所述第一连杆两端铰接中心之间的连线与第一升降杆两端铰接中心之间的连线平行,所述第二连杆两端铰接中心之间的连线与第二升降杆两端铰接中心之间的连线平行,且第二连杆两端铰接中心的连线的长度等于第二升降杆两端铰接中心之间的连线长度的一半,所述第一连杆两端铰接中心的连线的长度等于第一升降杆两端铰接中心之间的连线长度的一半。
优选的,所述两个支撑架中的第一升降杆及第二升降杆分别形成的两个V形结构的开口朝向相反;所述支撑板升降组件还包括驱动组件,所述驱动组件驱动两个支撑架中的第一升降杆及第二升降杆沿水平连接杆上的导向孔相向或相背远动,实现上撑杆的升降。
优选的,所述驱动组件包括丝杆,所述丝杆的两端设置于支座上,所述支座设置于底板上,所述丝杆由驱动电机及减速机驱动,所述丝杆带有螺纹旋向相反的两段,在螺纹旋向相反的两个丝杆段上分别设置有第一滑动块和第二滑动块,所述第一滑动块和第二滑动块上分别铰接有第一连接杆和第二连接杆,所述第一连接杆和第二连接杆的另一端分别铰接在上撑杆的下端面,所述上撑杆下端面还设置有第二位移传感器,所述第二位移传感和驱动电机均与控制面板连接。
优选的,所述上支撑架包括固定杆和上台面,所述固定杆设置于上台面与上撑杆之间,所述上台面的下方设置有“U”型杆,所述“U”型杆的两个水平部上滑动连接有第二滑动杆,所述第二滑动杆上设置有安装板,所述安装板面向上台面的一侧设置有背部护件,所述第二滑动杆的端部通过第二紧固件固定于“U”型杆的两个水平部上;所述“U”型杆的两个水平部的下端分别设置有竖直杆,两个所述竖直杆上滑动连接有第一滑动杆,所述第一滑动杆上通过固定片固定有两个膝盖护件,两个所述竖直杆上套设有绷带,所述第一滑动杆的两端通过第一紧固件固定于两个竖直杆上;所述上台面上设置有支撑架,所述支撑架上滑动设置有胸部护件,所述上台面的一侧设置有缺口,所述缺口位于胸部护件与背部护件之间。
优选的,所述控制面板固定于两个相邻的固定杆上;所述控制面板内部设置有处理单元、第一驱动单元、第二驱动单元和存储单元,所述控制面板上表面设置有显示触摸屏,所述显示触摸屏、第一驱动单元、第二驱动单元和存储单元分别与处理单元连接,所述第一驱动单元和第二驱动单元分别与电动推杆和驱动电机连接。
优选的,所述训练架还包括移动组件,其设置于底板的四周,所述移动组件包括走轮、导向杆和固定杆,所述行走轮设置于导向杆的下端,所述导向杆安装于底板上的安装孔内,所述导向杆的上端贯穿上方设置的固定块内的第一腔室并伸入第二腔室内,其端部设置有与导向杆垂直的支杆,所述第一腔室内设置有压缩弹簧且套设在导向杆外侧,所述第二腔室的侧壁上设置有滑动槽,所述支杆贯穿出滑动槽且与设置于固定块上端的固定杆通过调节螺杆连接。
本发明的有益效果:本发明基于人体运动学、工程学原理设计的一体化电动控制康复斜板训练架,使患者训练中更舒适,更符合临床需要,可用于神经康复,如脑卒中、脊髓损伤、下肢神经损伤等的踝关节屈伸活动训练、下肢跟腱挛缩挛缩的反复牵伸训练,有治疗肌痉挛、肌肉萎缩、预防血栓的作用;也可用于踝关节损伤或手术后、跟腱损伤或手术后的踝关节被动活动、肌腱牵伸训练,有治疗肌痉挛、肌肉萎缩、预防血栓的作用。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
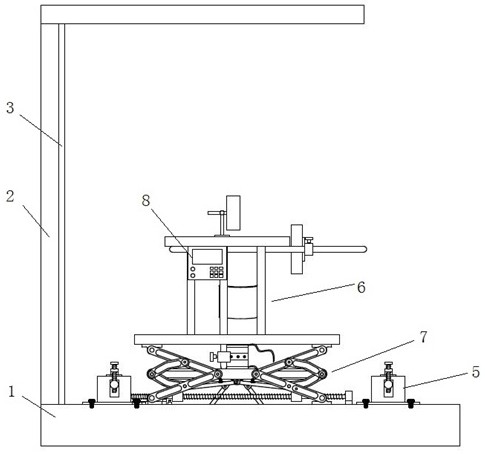
图1为本发明的一种一体化电动多功能康复训练架的主视图;
图2为图1的中上支撑板升降组件的打开后示意图;
图3为本发明的一种一体化电动多功能康复训练架的侧视图;
图4为本发明中脚踝训练组件的示意图;
图5为图4的变形后示意图;
图6为本发明中支撑板升降组件的示意图;
图7为图6的变形后示意图;
图8为本发明中上支撑架的示意图;
图9为本发明中移动组件的剖视图;
图10为本发明中控制原理图;
图11为本发明中处理单元的电路图。
其中,1-底板;2-立架;3-矫正镜;
4-脚踝训练组件;401-第一安装座;402-电动推杆;403-第一支撑摇杆;404-第二支撑摇杆;405-第一连杆;406-第二连杆;407-第二安装座;408-第三安装座;409-脚支撑板;410-第一位移传感器;411-角度传感器;
5-移动组件;501-安装孔;502-固定块;503-第一内腔;504-第二内腔;505-导向杆;506-行走轮;507-压缩弹簧;508-滑动槽;509-支杆;510-固定杆;511-调节螺杆;
6-上支撑架;601-固定杆;602-上台面;603-“U”型杆;604-竖直杆;605-第一滑动杆;606-膝盖护件;607-第一紧固件;608-绷带;609-第二滑动杆;610-安装板;611-背部护件;612-支撑架;613-胸部护件;614-第二紧固件;
7-支撑板升降组件;701-底座;702-第一升降杆;703-水平连接杆;704-导向孔;705-第二升降杆;706-第一活动杆;707-第二活动杆;708-驱动电机;709-支座;710-丝杆;711-第一滑动块;712-第二滑动块;713-第一连接杆;714-第二连接杆;715-上撑杆;716-第二位移传感器;
8-控制面板;801-处理单元;802-存储单元;803-第一驱动单元;804-第二驱动单元;805-触摸显示屏;
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明具体提供了一种一体化电动多功能康复训练架,如图1-3所示,包括底板1和立架2,所述底板1上设置有脚踝训练组件4、支撑板升降组件7以及设置于支撑板升降组件7上方的上支撑架6,所述脚踝训练组件4设置于底板1上的安装槽内,且位于上支撑架6下方,所述上支撑架6的侧壁上设置有控制面板8。
具体的,如图4和5所示,本发明中的脚踝训练组件4包括设置于底板1上的安装槽内的第一安装座401,所述第一安装座401上设置有电动推杆402,所述电动推杆402的推杆端部设置有推拉连杆(图中未显示),所述推拉连杆的两端均铰接有第一支撑摇杆403和第二支撑摇杆404,所述第一支撑摇杆403和第二支撑摇杆404的端部分别与第一连杆405和第二连杆406铰接,所述第一连杆405和第二连杆406的一端分别铰接于第二安装座407上,所述第一连杆405和第二连杆406的另一端分别铰接于脚支撑板409下端面上的第三安装座408上,所述脚支撑板409随着第一连杆405和第二连杆406的旋转而产生角度变化。
在电动推杆402的底部设置有第一位移传感器410,所述第一位移传感器410的端部与推杆端部连接,所述脚支撑板409的底部底面设置有角度传感器411且位于脚支撑板409的中心位置,所述第一位移传感410、角度传感器411和电动推杆402均与控制面板8连接。
所述第一支撑摇杆403、第二支撑摇杆404和第一连杆405、第二连杆406构成了双摇杆机构,随着第一支撑摇杆403和第二支撑摇杆404的旋转,带动第一连杆405和第二连杆406在双摇杆平面角度发生变化,则铰接在第一连杆405和第二连杆406上的脚支撑板409则随着随着第一连杆405和第二连杆406的旋转而产生角度变化,如图5所示。角度根据人体运动学设定踝关节安全范围:背屈0°~20°,跖屈0°~45°。
如图10所示,本发明中所述的控制面板8内部设置有处理单元801、第一驱动单元804、第二驱动单元804和存储单元802,所述控制面板8上表面设置有显示触摸屏805,所述显示触摸屏805、第一驱动单元804、第二驱动单元804和存储单元802分别与处理单元801连接,所述第一驱动单元803和第二驱动单元分别与电动推杆402和驱动电机716连接。
处理单元801可以为集成有处理器和其他辅助集成电路芯片,以及辅助电子元器件的印刷电路板,该印刷电路板上设置有不同类型的接口,用于处理单元和其他单元之间的通信连接或控制连接,如IC总线结构和并行总线接口。印刷电路板可方便的安装在控制面板内部,处理器则采用STM32F107单片机微处理器,如图11所示,该处理器相对于ARM微处理器,支持多种低功耗运行模式,并且STM32F107有自己的函数库,更便于软件开发。
STM32F107单片机微处理器通过运行其内的软件程序和和调用数据库达到控制第一驱动单元和第二驱动单元的目的;或者调用存储单元内的软件和调用存储单元内的数据库达到控制第一驱动单元和第二驱动单元控制对应的电动推杆和驱动电机的目的,存储单元优选包括随机存储器RAM。用户通过触摸显示屏805上用户界面的应用软件调用该训练架上的脚踝训练组件和支撑板升降组件完成特定操作。STM32F107单片机微处理器及其个组成部分的运行所需电能通过市电进行提供。
本发明在角度设定前,可用该装置评估患者安全活动范围,踝关节背伸和跖屈模式的交替时间,则通过测量两种情况下,电动推杆402上的推杆端部的移动距离,以及脚支撑板409的旋转角度,即第一位移传感器410和角度传感器411的测量数据上传至处理单元801,通过微处理器计算处推杆推出距离和收缩距离与脚支撑板409旋转角度之间的关系,则将该数据存储于存储单元,则通过STM32F107单片机微处理器编辑电动推杆402的工作模式,设置踝关节背伸和跖屈模式总治疗时长,包括时、分参数设置,其次踝关节背伸和跖屈模式交替时间,踝关节背伸和跖屈模式时长设置,包括分、秒参数设置,即实现脚支撑板409的变化角度,背屈0°~20°,跖屈0°~45°,可存储于STM32F107单片机上,也可以存储于存储单元内,使用时,通过操作界面调用该软件及数据库,进行控制电动推杆402进行工作。
如图6所示,所述支撑板升降组件7包括上撑杆715,在底板1与上撑杆715之间设置有沿上撑杆长度方向错开布置的两个升降架,任一一个所述的升降架包括呈V形结构布置的两个第一升降杆702和两个第二升降杆705,两个所述第一升降杆702下端与底板1上的底座701铰接,两个所述第二升降杆705上端与上撑杆715上的底座701铰接,两个所述第一升降杆702上端与两个第二升降杆705下端铰接在同一销轴(图中未显示)上的两端,所述销轴设置于水平连接杆703的侧壁上的导向孔704内,所述第一升降杆702上铰接有第一连杆706,所述第一连杆706另一端与第二连杆707通过同一销轴铰接在水平连接杆703上,所述第二连接杆707的另一端与第二升降杆705铰接。
所述升降架中,第一升降杆702与第二升降杆706对称布置在水平连接杆7036的上、下两侧,所述第一连杆706和第二连杆707对称布置在水平连接杆703的上、下两侧,所述第一连杆706两端铰接中心之间的连线与第一升降杆702两端铰接中心之间的连线平行,所述第二连杆707两端铰接中心之间的连线与第二升降杆705两端铰接中心之间的连线平行,且第二连杆707两端铰接中心的连线的长度等于第二升降杆705两端铰接中心之间的连线长度的一半,所述第一连杆706两端铰接中心的连线的长度等于第一升降杆702两端铰接中心之间的连线长度的一半。只要满足上述条件,当驱动驱动组件,怎能保证水平连接杆相对于底板只有垂直升降远动,能够避免水平连接杆703在水平方向上的错位运动,甚至是水平连接杆703根本无法实现运动。
所述两个支撑架中的第一升降杆702及第二升降杆705分别形成的两个V形结构的开口朝向相反;所述支撑板升降组件7还包括驱动组件,所述驱动组件驱动两个支撑架中的第一升降杆702及第二升降杆705沿水平连接杆703上的导向孔相向或相背远动,实现上撑杆715的升降。
所述驱动组件包括丝杆710,所述丝杆710的两端设置于支座709上,所述支座709设置于底板1上,所述丝杆710由驱动电机708及减速机驱动,所述丝杆710带有螺纹旋向相反的两段,在螺纹旋向相反的两个丝杆段上分别设置有第一滑动块711和第二滑动块712,所述第一滑动块711和第二滑动块712上分别铰接有第一连接杆713和第二连接杆714,所述第一连接杆713和第二连接杆714的另一端分别铰接在上撑杆715的下端面,所述上撑杆715下端面还设置有第二位移传感器716,所述第二位移传感器716和驱动电机708均与控制面板8连接,具体的,所述第二位移传感器716与处理单元801相连,驱动电机708与第二驱动单元804相连。
通过微处理器控制第二驱动单元804控制电机708及减速机驱动丝杆710,带动丝杆上的第一滑动块711和第二滑动块712沿其丝杆轴向做相向运动,则第一滑动块711上的第一连接杆713和第二滑动块712上的第二连接杆714相向靠拢,则推动铰接的水平连接杆703向上移动,则使得两个销轴沿着各自的导向孔704相背运动,带动第一升降杆702和第二升降杆705相背运动,则实现上撑杆715上升,调整上方的上支持架6的高度,满足不同用户的使用,如图7所示。若需要降低上撑杆715的高度,则通过驱动丝杆710旋转,第一滑动块711和第二滑动712块做相背运动,则实现水平连接杆703下降,进而调整上撑杆715的高度。
上撑杆715的下端面设置有第二位移传感器716,通过第二位移传感器716检测上撑杆715升降的高度,并将该信息上传至微处理器,并由触摸显示屏805进行显示,当上撑杆715的高度调节至合适位置时,则由第二驱动单元804接收微处理器的指令,控制驱动电机708停止工作。
如图8所示,本发明中所述的上支撑架6包括固定杆601和上台面602,所述固定杆601设置于上台面602与上撑杆716之间,所述上台面602的下方设置有“U”型杆603,所述“U”型杆603的两个水平部上滑动连接有第二滑动杆609,所述第二滑动杆609上设置有安装板610,所述安装板610面向上台面的一侧设置有背部护件611,所述第二滑动杆609的端部通过第二紧固件614固定于“U”型杆603的两个水平部上;所述“U”型杆603的两个水平部的下端分别设置有竖直杆604,两个所述竖直杆604上滑动连接有第一滑动杆605,所述第一滑动杆605上通过固定片固定有两个膝盖护件606,两个所述竖直杆604上套设有绷带608,所述第一滑动杆605的两端通过第一紧固件607固定于两个竖直杆604上;所述上台面602上设置有支撑架612,所述支撑架612上滑动设置有胸部护件613,所述上台面602的一侧设置有缺口,所述缺口位于胸部护件613与背部护件611之间。
使用时,将患者的上半身位于缺口内,其两只脚通过松紧带固定于脚支撑板上,并将膝盖卡在膝盖护件内,通过带子绑紧;根据人体间与足之间的高度参数设置,高度可在最低高度与最高高度之间通过微处理器控制第二驱动单元控制驱动单元工作,从而实现上支撑架高度的调整,以使患者上肢处于放松、舒适位置高度,同时对上肢起到支撑作用,减轻肩关节脱位。通过绷带对患者的大腿部进行固定,并通过胸部护件和背部护件对患者的上肢进行支撑和防护,则提高患者使用的舒适性。通过微处理器可实现站立总时间、背伸牵伸和趾屈放松时间及频率控制设定,控制第一驱动单元驱动电动推杆进行工作,反复训练刺激,提高训练效果,减少疲劳损伤。
此外,如图9所示,本发明还包括移动组件5,其设置于底板1的四周,包括走轮506和导向杆505,所述行走轮506设置于导向杆505的下端,所述导向杆505安装于底板1上的安装孔501内,所述导向杆505的上端贯穿上方设置的固定块502内的第一腔室503并伸入第二腔室504内,其端部设置有与导向杆505垂直的支杆509,所述第一腔室503内设置有压缩弹簧507且套设在导向杆505外侧,所述第二腔室504的侧壁上设置有滑动槽508,所述支杆509贯穿出滑动槽508且与设置于固定块502上端的固定杆510通过调节螺杆511连接。通过调节螺杆511调节导向杆505的高度,进而实现对行走轮506高度的调整,若要移动训练架,则通过扭转调节螺杆511,则带动支杆509沿着滑动槽508向下移动,则推动导向杆505沿着第一腔室503下移,则将安装孔501内的行走轮506推出底板1下部,方便移动训练架。
本发明中,在立架的竖直面设置有矫正镜,矫正镜可起到提醒患者自我矫正姿势的左右,提高康复训练成效。立架的水平部还可以设置有上肢锻炼组件,对患者的胳膊及手腕进行同步训练。
本发明的另一种变形:底板对称设置于立架的两侧,立架则为一双面镜结构,每个底板上分别设置有一套训练架,则可同时满足两个患者使用。
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种一体化电动多功能康复训练架
- 一种具有康复训练功能的多功能电动轮椅