一种工业机器人控制系统
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及工业机器人领域,尤其涉及一种工业机器人控制系统。
背景技术
工业机器人是由机械本体、控制器、伺服驱动系统和检测传感器装置构成的一种能仿人操作、可自动控制、重复编程、并能在三维空间完成各种作业任务的机电一体化设备。目前己广泛应用于汽车及汽车零部件制造、机械加工、电子电气制造、食品加工等许多领域,成为柔性制造系统(FMS)、工厂自动化(FA)、计算机集成制造系统(CIMS)的先进自动化工具。
现代工业的快速发展迫切需要进一步提高生产效率、产品质量及产品更新换代的速度,因而工业机器人己进入高速、高精度、智能和模块化的发展阶段,尤其在高速高精度方面,己成为现代工业机器人发展的主要趋势,如应用于激光焊接、激光切割的工业机器人需要更高的跟踪精度。因此,实现工业机器人高速高精度的运动控制,具有重要意义。
但在现有技术中,在对工业机器人进行控制中存在以下三个问题:
第一、工业机器人的供电装置在电量不足时往往不能及时发现,且发现后也不能以最优路径前往充电设备进行充电作业;
第二、在工业机器人在根据预设地图进行行进的过程中,不能有效辨识地图中的障碍物是否会导致工业机器人发生碰撞;
第三、工业机器人在运行时的振动参数是表征工业机器人故障的重要参数,现有技术中的测试精度均较低。
发明内容
因此,为了克服上述问题,本发明提供一种工业机器人控制系统包括:
一工业机器人控制器,所述工业机器人控制器包括内部存储单元、指令发送单元、地图生成单元,所述内部存储单元用于存储数据,所述指令发送单元用于向外部设备发送控制指令,所述地图生成单元用于根据外部设备生成预设工业机器人行进地图;以及,
一输入装置,所述输入装置与所述地图生成单元连接,所述输入装置向所述地图生成单元输入预设工业机器人行进地图;以及,
一电压传感器,所述电压传感器用于监测所述工业机器人的供电装置电量;以及,
一驱动控制器,所述驱动控制器包括充电控制单元和指令执行单元;以及,
一振动传感器,所述振动传感器用于监测所述工业机器人在行进过程中的振动信号;以及,
一信号调理器,所述信号调理器与所述振动传感器连接,所述信号调理器对所述振动传感器采集的振动信号进行信号调理;以及,
一激光测距器,所述激光测距器用于监测所述工业机器人在行进过程中与前方物体的距离信息;以及,
一输出装置,所述输出装置用于输出数据。
在所述工业机器人行进前,所述输入装置向所述工业机器人输入预设行进地图,所述地图生成单元接收到预设行进地图后,所述指令发送单元控制所述工业机器人按照预设行进地图进行运行,所述激光测距器将采集的距离信息实时传输至所述内部存储单元,所述内部存储单元内存储有距离预警值,若所述内部存储单元接收到的距离信息小于所述距离预警值,则所述指令发送单元向所述驱动控制器发送缓行指令,所述指令执行单元接收到所述缓行指令后控制所述工业机器人行进速度降为预设速度值,同时,所述地图生成单元根据所述工业机器人目前所在位置结合预设行进地图,判断所述工业机器人是否有转向指令,若无,则所述指令发送单元向所述驱动控制器发送停止指令,所述指令执行单元接收到所述停止指令后控制所述工业机器人停止行进;所述振动传感器将采集到的电压信号传输至所述内部存储器,所述内部存储器内存储有振动阈值,若所述内部存储器接收到的振动信号大于所述振动阈值,则所述指令发送单元发送停止指令至所述驱动控制器,所述指令执行单元接收到所述停止指令后控制所述工业机器人停止行进;所述电压传感器将采集到的电压信号传输至所述内部存储器,所述内部存储器内存储有电压阈值,若所述内部存储器接收到的电压信号小于所述电压阈值,则所述指令发送单元发送充电指令至所述驱动控制器,所述指令执行单元接收到所述充电指令后控制所述工业机器人按照所述充电控制单元设计路线前往设置于场地边界上的充电设备进行充电;所述工业机器人控制器将接收到的预设行进地图、电压信号、距离信息以及振动信号通过所述输出装置传输至远程监测设备。
优选的是,所述充电控制单元控制流程为:
步骤S1:以自主移动工业机器人的中心确定第一有效区域,工业机器人在初始位置处以其自身为中心,确定一个圆形区域,并在该圆形区域中确定第一有效区域,该圆形区域的半径可根据工业机器人的型号及实际行进面积而定。
步骤S2:在第一有效区域的边界上确定最佳点,其中,最佳点为在此处剩余面积最大之点,剩余面积定义为:以最佳点为中心确定的第二有效区域的不与第一有效区域重叠之剩余区域之面积。
步骤S3:控制自主移动工业机器人的中心移动至最佳点。
步骤S4:当自主移动工业机器人移动至最佳点时,重复上述步骤S1-S3,即以自主移动工业机器人的中心继续确定有效区域,并在有效区域的边界上继续确定最佳点,直至工业机器人行进至充电设备信号发射区域内,此时工业机器人根据充电设备信号发射区域内的充电设备信号对接充电设备,以对工业机器人进行充电。
优选的是,该圆形区域之半径设为1.5m,其中,有效区域中不包括墙壁等障碍物且不包括禁区。
优选的是,工业机器人在确定第二有效区域时的半径与在确定第一有效区域时的半径相等。
优选的是,所述信号调理电路包括第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第一电容、第二电容、第三电容、第四电容、第一运算放大器以及第二运算放大器。
其中,所述振动传感器的输出端与所述第一电阻的一端连接,所述第一电阻的另一端与所述第二电阻的一端连接,所述第一电阻的另一端与所述第一电容的一端连接,所述第一电容的另一端与所述第一运算放大器的输出端连接,所述第二电容的一端接地,所述第二电容的另一端与所述第一运算放大器的同相输入端连接,所述第二电阻的另一端与所述第一运算放大器的同相输入端连接,所述第二电阻的另一端与所述第二电容的另一端连接,所述第三电阻的一端接地,所述第三电阻的另一端与所述第一运算放大器的反相输入端连接,所述第三电阻的另一端与所述第四电阻的一端连接,所述第四电阻的另一端与所述第一运算放大器的输出端连接,所述第一运算放大器的输出端与所述第五电阻的一端连接,所述第五电阻的另一端与所述第六电阻的一端连接,所述第五电阻的一端与所述第三电容的一端连接,所述第四电容的一端接地,所述第四电容的另一端与所述第二运算放大器的同相输入端连接,所述第六电阻的另一端与所述第二运算放大器的同相输入端连接,所述第三电容的另一端与所述第二运算放大器的输出端连接,所述第七电阻的一端接地,所述第七电阻的另一端与所述第八电阻的一端连接,所述第七电阻的另一端与所述第二运算放大器的反相输入端连接,所述第八电阻的另一端与所述第二运算放大器的输出端连接,所述第二运算放大器的输出端与所述内部存储单元连接。
与现有技术相比,本发明具有如下的有益效果:
本发明提供的工业机器人控制系统包括工业机器人控制器、输入装置、电压传感器、驱动控制器、振动传感器、信号调理器、激光测距器、输出装置,其中,电压传感器能够实时获取工业机器人的供电装置的电压信号,当电压信号小于预设电压阈值时,则说明工业机器人电力支持不足,则由驱动控制器中的充电控制单元控制工业机器人以优选路线前往充电设备,工业机器人在行进过程中的振动信号能够表征工业机器人的故障特征,因此,在此对工业机器人在行进过程中的使用振动传感器和信号调理器对其振动信号的精确监测至关重要,另外,激光测距器能够获取工业机器人在行进过程中与前方障碍物的距离信息,结合预设行进地图对工业机器人是否会发生碰撞进行分析,即,根据预设行进地图中工业机器人的行进线路,以及目前工业机器人的位置判断工业机器人下一时刻的运行方向,若方向发生改变,则能够避免发生碰撞,若不发生改变,则工业机器人控制器控制驱动控制器使工业机器人停止,以免发生碰撞,如此能够对工业机器人行进过程中突现障碍进行避让。
附图说明
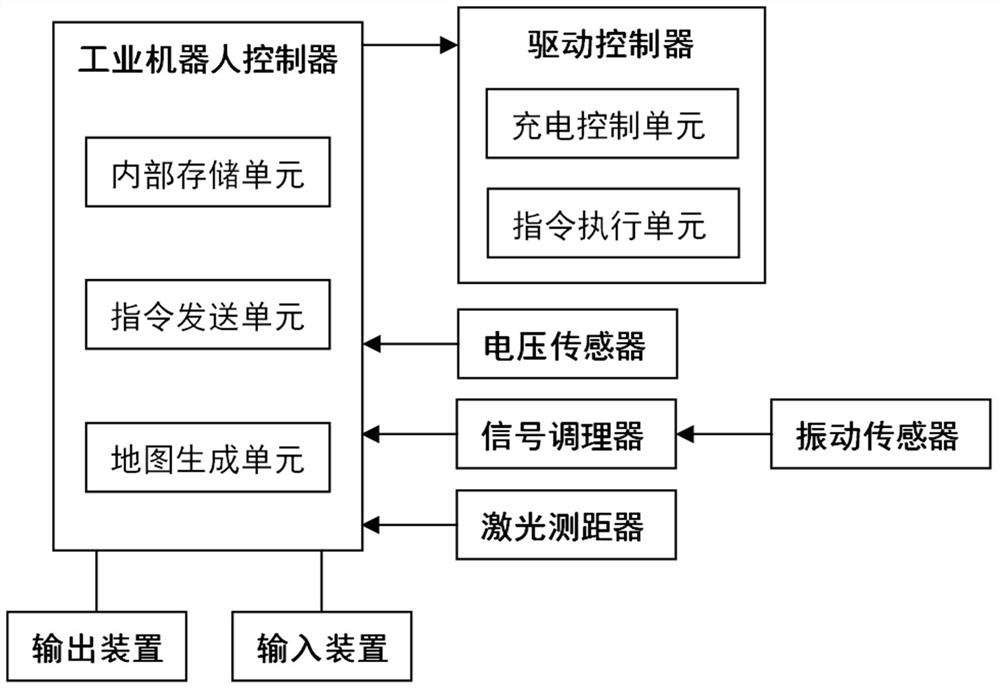
图1为本发明的工业机器人控制系统的功能图;
图2为本发明的充电控制单元路径控制的第一示意图;
图3为本发明的充电控制单元路径控制的第二示意图;
图4为本发明的充电控制单元路径控制的第三示意图;
图5为本发明的信号调理器的电路图。
具体实施方式
下面结合附图和实施例对本发明提供的工业机器人控制系统进行详细说明。
如图1所示,本发明提供的工业机器人控制系统包括:
一工业机器人控制器,所述工业机器人控制器包括内部存储单元、指令发送单元、地图生成单元,所述内部存储单元用于存储数据,所述指令发送单元用于向外部设备发送控制指令,所述地图生成单元用于根据外部设备生成预设工业机器人行进地图;以及,
一输入装置,所述输入装置与所述地图生成单元连接,所述输入装置向所述地图生成单元输入预设工业机器人行进地图;以及,
一电压传感器,所述电压传感器用于监测所述工业机器人的供电装置电量;以及,
一驱动控制器,所述驱动控制器包括充电控制单元和指令执行单元;以及,
一振动传感器,所述振动传感器用于监测所述工业机器人在行进过程中的振动信号;以及,
一信号调理器,所述信号调理器与所述振动传感器连接,所述信号调理器对所述振动传感器采集的振动信号进行信号调理;以及,
一激光测距器,所述激光测距器用于监测所述工业机器人在行进过程中与前方物体的距离信息;以及,
一输出装置,所述输出装置用于输出数据。
在所述工业机器人行进前,所述输入装置向所述工业机器人输入预设行进地图,所述地图生成单元接收到预设行进地图后,所述指令发送单元控制所述工业机器人按照预设行进地图进行运行,所述激光测距器将采集的距离信息实时传输至所述内部存储单元,所述内部存储单元内存储有距离预警值,若所述内部存储单元接收到的距离信息小于所述距离预警值,则所述指令发送单元向所述驱动控制器发送缓行指令,所述指令执行单元接收到所述缓行指令后控制所述工业机器人行进速度降为预设速度值,同时,所述地图生成单元根据所述工业机器人目前所在位置结合预设行进地图,判断所述工业机器人是否有转向指令,若无,则所述指令发送单元向所述驱动控制器发送停止指令,所述指令执行单元接收到所述停止指令后控制所述工业机器人停止行进;所述振动传感器将采集到的电压信号传输至所述内部存储器,所述内部存储器内存储有振动阈值,若所述内部存储器接收到的振动信号大于所述振动阈值,则所述指令发送单元发送停止指令至所述驱动控制器,所述指令执行单元接收到所述停止指令后控制所述工业机器人停止行进;所述电压传感器将采集到的电压信号传输至所述内部存储器,所述内部存储器内存储有电压阈值,若所述内部存储器接收到的电压信号小于所述电压阈值,则所述指令发送单元发送充电指令至所述驱动控制器,所述指令执行单元接收到所述充电指令后控制所述工业机器人按照所述充电控制单元设计路线前往设置于场地边界1上的充电设备2进行充电;所述工业机器人控制器将接收到的预设行进地图、电压信号、距离信息以及振动信号通过所述输出装置传输至远程监测设备。
上述实施方式中,本发明提供的工业机器人控制系统包括工业机器人控制器、输入装置、电压传感器、驱动控制器、振动传感器、信号调理器、激光测距器、输出装置,其中,电压传感器能够实时获取工业机器人的供电装置的电压信号,当电压信号小于预设电压阈值时,则说明工业机器人电力支持不足,则由驱动控制器中的充电控制单元控制工业机器人以优选路线前往充电设备,工业机器人在行进过程中的振动信号能够表征工业机器人的故障特征,因此,在此对工业机器人在行进过程中的使用振动传感器和信号调理器对其振动信号的精确监测至关重要,另外,激光测距器能够获取工业机器人在行进过程中与前方障碍物的距离信息,结合预设行进地图对工业机器人是否会发生碰撞进行分析,即,根据预设行进地图中工业机器人的行进线路,以及目前工业机器人的位置判断工业机器人下一时刻的运行方向,若方向发生改变,则能够避免发生碰撞,若不发生改变,则工业机器人控制器控制驱动控制器使工业机器人停止,以免发生碰撞,如此能够对工业机器人行进过程中突现障碍进行避让。
如图2所示,所述充电控制单元控制流程为:
步骤S1:以自主移动工业机器人的中心确定第一有效区域,具体地,工业机器人在初始位置处以其自身为中心,确定一个圆形区域,并在该圆形区域中确定第一有效区域4,该圆形区域的半径可根据工业机器人的型号及实际行进面积而定,在一个实施例中,该圆形区域之半径设为1.5m,其中,有效区域中不包括墙壁等障碍物且不包括禁区。
步骤S2:在第一有效区域4的边界上确定最佳点,其中,最佳点为在此处剩余面积最大之点,剩余面积定义为:以最佳点为中心确定的第二有效区域的不与第一有效区域重叠之剩余区域之面积。以图3及4为例,在图3中,假设A为最佳点,则以A为中心确定形的第二有效区域5,剩余区域即为第二有效区域5的不与第一有效区域4重叠的区域。与图3类似,图4中的剩余区域即为以B为中心确定的第二有效区域5的不第一有效区域4重叠的区域。很明显,图4中的剩余面积比图3中之剩余面积大,因此图4中之点B确定为最佳点。在实际运用过程中,充电控制单元可通过其处理器的运算程式而自动确定最佳点。优选地,工业机器人在确定第二有效区域5时的半径与在确定第一有效区域4时的半径相等。
步骤S3:控制自主移动工业机器人的中心移动至最佳点;
步骤S4:当自主移动工业机器人移动至最佳点时,重复上步骤S1-S3,即以自主移动工业机器人的中心继续确定有效区域,并在有效区域的边界上继续确定最佳点,直至工业机器人行进至充电设备信号发射区域3内,此时工业机器人根据充电设备信号发射区域3内的充电设备信号对接充电设备2,以对工业机器人进行充电。
需要说明的是,在工业机器人每一步的行进过程中,确定的最佳点可能不止一个,那么他们的权重是相同的。在实际使用过程中可由工业机器人的遍历演算法确定下一步要去的点总体趋势是使机器人朝向广阔区域行走,以较大概率获得充电设备2的信号。
进一步地,如图5所示,所述信号调理电路包括第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第一电容、第二电容、第三电容、第四电容、第一运算放大器以及第二运算放大器。
其中,所述振动传感器的输出端与所述第一电阻的一端连接,所述第一电阻的另一端与所述第二电阻的一端连接,所述第一电阻的另一端与所述第一电容的一端连接,所述第一电容的另一端与所述第一运算放大器的输出端连接,所述第二电容的一端接地,所述第二电容的另一端与所述第一运算放大器的同相输入端连接,所述第二电阻的另一端与所述第一运算放大器的同相输入端连接,所述第二电阻的另一端与所述第二电容的另一端连接,所述第三电阻的一端接地,所述第三电阻的另一端与所述第一运算放大器的反相输入端连接,所述第三电阻的另一端与所述第四电阻的一端连接,所述第四电阻的另一端与所述第一运算放大器的输出端连接,所述第一运算放大器的输出端与所述第五电阻的一端连接,所述第五电阻的另一端与所述第六电阻的一端连接,所述第五电阻的一端与所述第三电容的一端连接,所述第四电容的一端接地,所述第四电容的另一端与所述第二运算放大器的同相输入端连接,所述第六电阻的另一端与所述第二运算放大器的同相输入端连接,所述第三电容的另一端与所述第二运算放大器的输出端连接,所述第七电阻的一端接地,所述第七电阻的另一端与所述第八电阻的一端连接,所述第七电阻的另一端与所述第二运算放大器的反相输入端连接,所述第八电阻的另一端与所述第二运算放大器的输出端连接,所述第二运算放大器的输出端与所述内部存储单元连接。
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种开放式工业机器人控制系统及一种开放式工业机器人
- 一种工业机器人控制系统及工业机器人