基于机器学习的光智能水肥一体机及工艺
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及基于机器学习的光智能水肥一体机及工艺。
背景技术
北京市水资源匮乏,属于严重缺水的特大型城市,人均水资源量不足全国平均水平的10%,2019年北京市市用水总量41.7亿立方米,其中农业用水为3.69亿立方米,占全市用水总量的比例为9%,农业用水中设施农业用水占比31.9%,为种植业中第一用水大户。北京市提出了农业灌溉水利用系数提高到0.75、农田有效灌溉面积达到95%以上、水资源利用率提高15%以上等目标,其中,设施蔬菜年用水量不超过500方/亩,在农业节肥方面提出了农用化肥利用率提高到40%,实现以上目标,灌溉施肥精准调控是必不可少的技术环节。
作物灌溉施肥受到温度、湿度、光照等较多因素影响,其中,光照是影响作物蒸腾蒸发的关键因素之一,发明人经过研究发现光照与作物耗水呈线性关系,可以利用光照指导灌溉,实现精准水肥调控。水肥一体机研发硬件设备组装大同小异,但是缺乏精准灌溉施肥主控机决策,不利于精准灌溉施肥技术的推广应用。目前农业从业人员老龄化严重,亟需简单易操作,技术门槛低的农业产品,目前市场上水肥一体机产品操作较为复杂,不能短时间内掌握使用流程,导致设备安装后弃用的现象,造成资源浪费,基于以上的背景条件,本发明集成研发了一种基于机器学习的“光智能”水肥一体机,操作简单,容易掌握,预制“光智能”精准灌溉等决策,实现机器学习功能,提高了设备的智能和精准性。
发明内容
本发明所要解决的技术问题总的来说是提供一种基于机器学习的光智能水肥一体机及工艺。
为解决上述问题,本发明所采取的技术方案是:
一种基于机器学习的光智能水肥工艺,包括以下工艺;
S1,建立基于光照、时序和土壤水分的灌溉决策;
S2,建立基于比例和EC值的施肥决策;
在步骤S1中,执行S1.1,建立基于光照的灌溉决策并分为作物参数模型控制和机器学习参数控制模式;首先,建立作物参数模型,控制依据以下公式,自动计算出单次灌溉时长;
I=A*Wm*J 公式(1);
I:单次灌水定额,单位,mL/m
然后,确定单次灌溉时长T,单位,min;
T=60*I*10
I:单次灌水定额,单位,mL/m
其次,生产者根据种植情况,将参数输入水肥一体机,参数包括种植作物、茬口、生育时期、定植密度和/或滴头流量;
再次,灌溉系数A由在先试验结果根据种植预制,水量倍数J功能,根据经验值调整;
之后,执行机器学习参数控制,当日累计光辐射达到光辐射阈值,则判断当前天气为晴天,采样之前若干晴天光辐射的平均值计算为日均辐射,作为光辐射阈值;随着,每个月对日均辐射值进行校正;再后,生产者根据种植情况,输入日灌溉次数和单次灌溉时长,单位为min,系统自动计算出光辐射启动门槛;
S1.2,建立基于时序和土壤水分的精准灌溉决策;
首先,建立基于时序控制的灌溉决策,即按照生产者设置的灌溉起止时间和间隔,自动启动和/或停止灌溉;然后,建立基于土壤水分控制的灌溉决策,将土壤水分探头插入作物根系设定范围内,根据设置的土壤水分上下限管理灌溉;
S2,建立精准施肥决策;
S2.1,首先,根据作物养分需求,进行肥料配置并溶解于设定不同比例的施肥桶内;然后,基于比例调节的施肥控制需要输入定义施肥桶A、B、C的不同注肥比例,从而控制三个施肥桶不同的肥料吸入量,采用注肥泵抽取肥料桶内的营养液;
S2.2,基于EC值调节,首先,预制EC值和营养液浓度的相关模型,根据输入的EC值,自动调控注肥泵的转速,根据输入的PH值,自动调控施肥桶C的吸肥量,还设置了施肥桶A:施肥桶B的不同吸肥比例输入;
根据种植需求输入施肥时间和冲洗时长,但是施肥时间必须小于等于灌溉时间。
一种基于机器学习的光智能水肥一体机,包括施肥部件、监测部件和/或控制部件。
作为上述技术方案的进一步改进:
施肥部件包括水肥配比罐,水肥配比罐包括至少三个施肥桶体;其中,
三个施肥桶体分为施肥桶A、施肥桶B及施肥桶C;
水肥配比罐通过水肥管路连接有作为控制部件的施肥主控机;
在施肥桶体与水肥管路之间连接有带有注肥泵和/或过滤器的施肥输出倒锥管道;
监测部件包括测定光辐射的光照探头、温湿度探头和/或检测土壤水分的探头;
施肥主控机为施肥主控机的主体,
控制部件包括处理器、载有预先试验数据的数据库、电源和/或与处理器电连接且用于控制调控注肥泵的电机和/或电磁阀启停的执行电路;
处理器负责采集光照、土壤水分的监测数据并下达灌溉施肥指令给执行电路控制对应电机启停,根据生产者设置的灌溉施肥参数,调控注肥泵的电机和/或电磁阀启停;
检测土壤水分的探头包括表层土壤水分探头、中层土壤水分探头和/或下层土壤水分探头,以监测对应土壤层的含水率及差值变化;
温湿度探头,用于温度采集。
一种水肥一体机,包括水肥汇集腔,水肥汇集腔分别连接有给水管的输出端、田间管道的输入端及水肥管路的输出端;水肥配比罐连接有水肥管路的输入端;
在田间管道上分布有定量灌溉组件及增压补给组件。
作为上述技术方案的进一步改进:
水肥配比罐包括施肥桶体;在施肥桶体上部设置有施肥搅拌装置及施肥送料管道;
在施肥桶体下端设置有带有注肥泵的施肥输出倒锥管道;
施肥输出倒锥管道上大下小设置;施肥输出倒锥管道下部还旁接有施肥清堵组件;
施肥搅拌装置包括具有旋转及伸缩动作的搅拌清理移动轴;在搅拌清理移动轴悬臂端具有搅拌固定支座;在搅拌固定支座的四十五度倾斜面上垂直旋转有搅拌旋转垂直中心轴;
在搅拌旋转垂直中心轴端部垂直旋转有搅拌旋转支座的四十五度斜面;
在搅拌旋转支座斜面上设置有与搅拌固定支座对应且与搅拌旋转垂直中心轴同轴的搅拌旋转导向环轨;
在搅拌旋转支座上设置有用于对施肥桶体内水肥进行搅拌的搅拌搅龙;
搅拌搅龙具有朝下且位于施肥桶体内的搅拌工作工位,搅拌搅龙水平朝向且离开施肥桶体的搅拌清理工位;
在搅拌搅龙的外侧壁上设置有搅拌工艺沟槽;
在搅拌清理工位上设置有搅拌摆动倾斜刷;在搅拌摆动倾斜刷上设置有搅拌清理喷嘴,以下吹附着物;
在搅拌摆动倾斜刷上方设置有搅拌固定架;在搅拌固定架下端连接有若干搅拌连接弹簧,在搅拌连接弹簧下端连接有搅拌下拍板,在搅拌固定架下端设置有搅拌敲击锤,以接触上升搅拌下拍板的上表面;
搅拌摆动倾斜刷下摆后,以与搅拌搅龙上部背侧接触以清理附着物;
搅拌摆动倾斜刷上摆后,以与接触上升的搅拌下拍板下表面接触振动清理,同时使得搅拌下拍板上升接触搅拌敲击锤而被敲击后振动。
施肥清堵组件包括上端口与施肥输出倒锥管道连接的清堵导向管套;在清堵导向管套中被推动旋转的清堵旋转导向盘;
在清堵旋转导向盘上设置有清堵顶杆,在清堵旋转导向盘上倾斜分布有清堵进水孔;
在清堵旋转导向盘端面上设置有波轮片。
定量灌溉组件包括送入水肥的灌溉支管;在灌溉支管上分布有伸入到土壤中的灌溉毛细纤维的根部;在灌溉支管下端设置有灌溉进入管的上端;
在灌溉进入管下端连接有埋入到土壤中的灌溉出口存储头,灌溉出口存储头连接有灌溉充气泵管路的下端口;
在灌溉出口存储头下倾斜侧面设置有灌溉V型出液口,在灌溉V型出液口上端铰接有灌溉遮挡板,在灌溉遮挡板上端连接有灌溉上遮盖板,以遮挡灌溉出口存储头。
一种水肥一体机施肥工艺,包括以下步骤;
步骤一,根据调配的水肥配比罐的比例,水肥配比罐输出水肥;
步骤二,打开田间管道上对应电磁阀,以向待灌溉区域作为输送水肥,并在田间管道设定管路位置上,通过增压补给组件进行增压并混入气泡或水肥。
作为上述技术方案的进一步改进:
当需要清搅拌时,首先,在搅拌工作工位,在搅拌搅龙对水肥搅拌,防止沉淀堵塞;然后,移动搅拌固定支座,搅拌搅龙对施肥桶体不同位置进行搅拌;其次,搅拌旋转垂直中心轴旋转将待清理的搅拌搅龙上摆到搅拌清理工位并旋转;再次,搅拌摆动倾斜刷下摆后,以与搅拌搅龙上部背侧接触以清理附着物;之后,搅拌摆动倾斜刷上摆后,以与接触上升的搅拌下拍板下表面接触振动清理,同时使得搅拌下拍板上升接触搅拌敲击锤而被敲击后振动;
当需要清理施肥输出倒锥管道时,首先,清堵导向管套送入清洗液;然后,清洗液通过清堵进水孔及波轮片;使得清堵旋转导向盘旋转,实现旋转清理施肥输出倒锥管道内壁,通过内锥面进行聚集冲洗。
首先,水肥通过灌溉进入管输出到灌溉出口存储头的灌溉V型出液口;然后,灌溉充气泵管路与灌溉进入管及灌溉V型出液口形成文丘里管,灌溉遮挡板打开,从而将混有空气或二氧化碳的气体增压送入,补充氧气或二氧化碳。
本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。
附图说明
图1是本发明的使用结构示意图。
图2是本发明的施肥搅拌装置结构示意图。
图3是本发明的施肥清堵组件结构示意图。
图4是本发明的田间管道结构示意图。
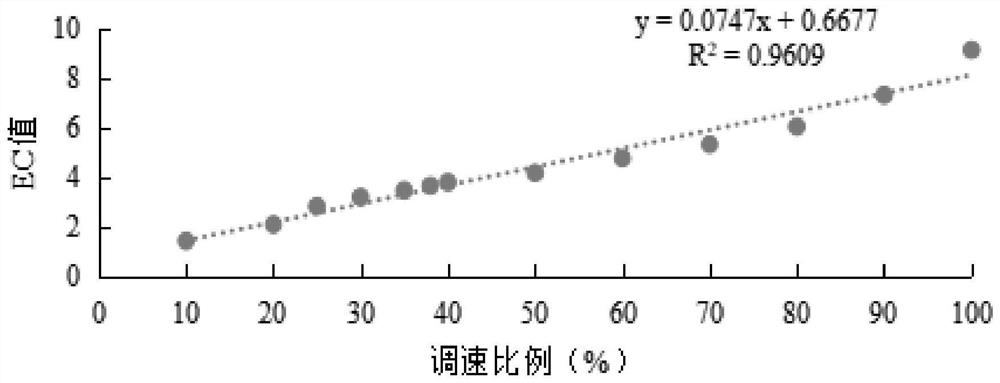
图5是本发明的注肥泵调速比例和营养液EC值相关性示意图。
其中:1、水肥配比罐;2、水肥管路;3、施肥主控机;4、光照探头;5、温湿度探头;6、给水管;7、中层土壤水分探头;8、表层土壤水分探头;9、下层土壤水分探头;10、田间管道;11、定量灌溉组件;12、增压补给组件;13、施肥桶体;14、施肥搅拌装置;15、施肥送料管道;16、施肥输出倒锥管道;17、施肥清堵组件;18、搅拌清理移动轴;19、搅拌固定支座;20、搅拌旋转支座;21、搅拌旋转导向环轨;22、搅拌旋转垂直中心轴;23、搅拌工作工位;24、搅拌清理工位;25、搅拌搅龙;26、搅拌工艺沟槽;27、搅拌摆动倾斜刷;28、搅拌清理喷嘴;29、搅拌固定架;30、搅拌连接弹簧;31、搅拌下拍板;32、搅拌敲击锤;33、清堵导向管套;34、清堵旋转导向盘;35、清堵顶杆;36、清堵进水孔;37、灌溉支管;38、灌溉毛细纤维;39、灌溉充气泵管路;40、灌溉进入管;41、灌溉出口存储头;42、灌溉V型出液口;43、灌溉遮挡板;44、灌溉上遮盖板。
具体实施方式
如图5,实施例1,本发明集成了基于光照、时序和土壤水分的精准灌溉决策,以及基于比例和EC值的两种精准施肥决策。
其中,(a)、基于光照的精准灌溉决策
基于光照的灌溉决策主要分为作物参数模型控制和机器学习参数控制两种模式,作物参数模型控制依据以下公式,自动计算出单次灌溉时长;
I=A*Wm*J 公式(1)
I:单次灌水定额,单位,mL/m
T=60*I*10
T:单次灌溉时长,单位,min;I:单次灌水定额,单位,mL/m
生产者根据种植情况,将种植作物、茬口、生育时期、定植密度和滴头流量等参数输入水肥一体机。
灌溉系数由前期试验结果根据种植预制,自动确定特定茬口作物不同生育时期的灌溉系数,生产者可以调整使用水量倍数功能,调整模型计算的灌水定额。比如,春茬番茄结果期灌溉系数为3.0,定植密度为3株/m
机器学习参数控制中,当日累计光辐射达到700J/cm
(b)、基于时序和土壤水分的精准灌溉决策
(b1)、基于时序控制的灌溉决策,是指按照生产者设置的灌溉起止时间,自动启动停止灌溉,水肥一体机共设置了三个时间段和间隔,以及单次灌溉时长输入口,比如生产者设置上午8:00~12:00,间隔120min,灌溉5min,则10:00和12:00分别启动两次,10:05和12:05分别停止灌溉。
(b2)、基于土壤水分控制的灌溉决策,将土壤水分探头插入作物根系10cm范围内,根据设置的土壤水分上下限管理灌溉,比如输入当土壤体积含水量低于20%开始灌溉,当达到30%时候则停止灌溉。该功能区还设置了允许工作时间段和全天灌溉时长限制,比如输入8:00~16:00,则在该时间段外即使达到灌溉下限20%也不进行灌溉,只有进入允许工作时间段,才能开始灌溉。全天灌溉时长限制比如输入200min,则每天最长允许灌溉200min,即使没有得到灌溉上限30%,也不再进行灌溉。
(c)、精准施肥决策
根据作物养分需求,进行肥料配置,溶解于施肥桶内,采用注肥泵抽取肥料桶内的营养液,基于比例调节的精准施肥控制需要生产者输入定义A、B、C三个桶的不同注肥比例,比如A设置为50%,B设置为30%,C设置为20%,则A桶的注肥泵按照50%的转速运行,B按照30%,C按照20%,从而控制三个施肥桶不同的肥料吸入量。EC值是指溶液中可溶性盐的浓度的值,也可以用来代表液体肥料或种植介质中的可溶性离子浓度。
基于EC值调节,预制EC值和营养液浓度的相关模型,根据生产者输入的EC值,自动调控注肥泵的转速,根据生产者输入的PH值,自动调控酸桶(一般为C桶)的吸肥量,还设置了A:B的不同吸肥比例输入端,比如设置为2.0,则保证EC值达到输入值的前提下,A桶的注肥量为B桶的2倍。
生产者根据种植需求输入施肥时间和冲洗时长,但是施肥时间必须小于等于灌溉时间,比如灌溉时间输入10min,施肥时间输入10min,冲洗时长输入1min,则灌溉10min营养液,再灌溉1min的清水冲洗管道。
(d)、水肥一体机采用10寸触摸屏,控制界面分区明确,功能简单。主要分为显示区和控制区两大板块,显示区包括灌溉策略、施肥策略、施肥主控机信息和综合信息四个方面,灌溉决策可以选择光辐射、时序、土壤水分或者手动控制,施肥策略显示的是施肥相关的参数设置情况,包括施肥时长、冲洗时长、调节方式,EC设定值、PH设定值和AB肥比例,施肥主控机信息显示主管路、A通道、B通道、C通道的流速和日流量,以及当前实时的EC和PH值,综合信息为空气温度、空气湿度、基质温度、基质湿度、光照强度、日累计辐射、日灌溉次数和日灌溉时长的实时数据。控制区主要包括灌溉设置、施肥设置、历史记录、系统设置和锁定屏幕五个功能区,可以实现灌溉施肥参数设置和水肥一体机运行的历史记录查询等功能。
基于机器学习的光智能水肥一体机主要包括三个方面:施肥部件、监测部件和控制部件,施肥部件主要包括ABC三个施肥桶、注肥泵和过滤器等,监测部件主要包括测定光辐射的光照探头和检测土壤水分的探头,控制部件为施肥主控机的主体,负责采集光照、土壤水分等监测数据和下达灌溉施肥指令,根据生产者设置的灌溉施肥参数,调控注肥泵和电磁阀启停。
具体田间应用
在北京市昌平区、大兴区和密云区进行田间试验示范,示范面积8亩,昌平区鑫诚园供试品种为“红颜”,栽培模式为高架基质栽培,1月11日安装施肥主控机,至5月17日草莓拉秧,共用水46m3,灌溉施肥66次,施肥主控机工作总时长776min,草莓糖酸比为28.5,比常规管理提高了8.5%,亩节省灌溉施肥用工2个。
如图1-5所示,本实施例的基于机器学习的光智能水肥一体机,包括施肥部件、监测部件和/或控制部件。
施肥部件包括水肥配比罐1,水肥配比罐1包括至少三个施肥桶体13;其中,三个施肥桶体13分为施肥桶A、施肥桶B及施肥桶C;
水肥配比罐1通过水肥管路2连接有作为控制部件的施肥主控机3;
在施肥桶体13与水肥管路2之间连接有带有注肥泵和/或过滤器的施肥输出倒锥管道16;
监测部件包括测定光辐射的光照探头4、温湿度探头5和/或检测土壤水分的探头;
施肥主控机3为施肥主控机的主体,
控制部件包括处理器、载有预先试验数据的数据库、电源和/或与处理器电连接且用于控制调控注肥泵的电机和/或电磁阀启停的执行电路;
处理器负责采集光照、土壤水分的监测数据并下达灌溉施肥指令给执行电路控制对应电机启停,根据生产者设置的灌溉施肥参数,调控注肥泵的电机和/或电磁阀启停;
检测土壤水分的探头包括表层土壤水分探头8、中层土壤水分探头7和/或下层土壤水分探头9,以监测对应土壤层的含水率及差值变化;
温湿度探头5,用于空气温度、空气相对湿度采集。
本实施例的水肥一体机,包括水肥汇集腔,水肥汇集腔分别连接有给水管6的输出端、田间管道10的输入端及水肥管路2的输出端;水肥配比罐1连接有水肥管路2的输入端;
在田间管道10上分布有定量灌溉组件11及增压补给组件12。
水肥配比罐1包括施肥桶体13;在施肥桶体13上部设置有施肥搅拌装置14及施肥送料管道15;
在施肥桶体13下端设置有带有注肥泵的施肥输出倒锥管道16;
施肥输出倒锥管道16上大下小设置;施肥输出倒锥管道16下部还旁接有施肥清堵组件17;
施肥搅拌装置14包括具有旋转及伸缩动作的搅拌清理移动轴18;在搅拌清理移动轴18悬臂端具有搅拌固定支座19;在搅拌固定支座19的四十五度倾斜面上垂直旋转有搅拌旋转垂直中心轴22;
在搅拌旋转垂直中心轴22端部垂直旋转有搅拌旋转支座20的四十五度斜面;
在搅拌旋转支座20斜面上设置有与搅拌固定支座19对应且与搅拌旋转垂直中心轴22同轴的搅拌旋转导向环轨21;
在搅拌旋转支座20上设置有用于对施肥桶体13内水肥进行搅拌的搅拌搅龙25;
搅拌搅龙25具有朝下且位于施肥桶体13内的搅拌工作工位23,搅拌搅龙25水平朝向且离开施肥桶体13的搅拌清理工位24;
在搅拌搅龙25的外侧壁上设置有搅拌工艺沟槽26;
在搅拌清理工位24上设置有搅拌摆动倾斜刷27;在搅拌摆动倾斜刷27上设置有搅拌清理喷嘴28,以下吹附着物;
在搅拌摆动倾斜刷27上方设置有搅拌固定架29;在搅拌固定架29下端连接有若干搅拌连接弹簧30,在搅拌连接弹簧30下端连接有搅拌下拍板31,在搅拌固定架29下端设置有搅拌敲击锤32,以接触上升搅拌下拍板31的上表面;
搅拌摆动倾斜刷27下摆后,以与搅拌搅龙25上部背侧接触以清理附着物;
搅拌摆动倾斜刷27上摆后,以与接触上升的搅拌下拍板31下表面接触振动清理,同时使得搅拌下拍板31上升接触搅拌敲击锤32而被敲击后振动。
施肥清堵组件17包括上端口与施肥输出倒锥管道16连接的清堵导向管套33;在清堵导向管套33中被推动旋转的清堵旋转导向盘34;
在清堵旋转导向盘34上设置有清堵顶杆35,在清堵旋转导向盘34上倾斜分布有清堵进水孔36;
在清堵旋转导向盘34端面上设置有波轮片。
定量灌溉组件11包括送入水肥的灌溉支管37;在灌溉支管37上分布有伸入到土壤中的灌溉毛细纤维38的根部;在灌溉支管37下端设置有灌溉进入管40的上端;
在灌溉进入管40下端连接有埋入到土壤中的灌溉出口存储头41,灌溉出口存储头41连接有灌溉充气泵管路39的下端口;
在灌溉出口存储头41下倾斜侧面设置有灌溉V型出液口42,在灌溉V型出液口42上端铰接有灌溉遮挡板43,在灌溉遮挡板43上端连接有灌溉上遮盖板44,以遮挡灌溉出口存储头41。
本实施例的水肥一体机施肥工艺,包括以下步骤;
步骤一,根据调配的水肥配比罐1的比例,水肥配比罐1输出水肥;
步骤二,打开田间管道10上对应电磁阀,以向待灌溉区域作为输送水肥,并在田间管道10设定管路位置上,通过增压补给组件12进行增压并混入气泡或水肥。
当需要清搅拌时,首先,在搅拌工作工位23,在搅拌搅龙25对水肥搅拌,防止沉淀堵塞;然后,移动搅拌固定支座19,搅拌搅龙25对施肥桶体13不同位置进行搅拌;其次,搅拌旋转垂直中心轴22旋转将待清理的搅拌搅龙25上摆到搅拌清理工位24并旋转;再次,搅拌摆动倾斜刷27下摆后,以与搅拌搅龙25上部背侧接触以清理附着物;之后,搅拌摆动倾斜刷27上摆后,以与接触上升的搅拌下拍板31下表面接触振动清理,同时使得搅拌下拍板31上升接触搅拌敲击锤32而被敲击后振动;
当需要清理施肥输出倒锥管道16时,首先,清堵导向管套33送入清洗液;然后,清洗液通过清堵进水孔36及波轮片;使得清堵旋转导向盘34旋转,实现旋转清理施肥输出倒锥管道16内壁,通过内锥面进行聚集冲洗。
首先,水肥通过灌溉进入管40输出到灌溉出口存储头41的灌溉V型出液口42;然后,灌溉充气泵管路39与灌溉进入管40及灌溉V型出液口42形成文丘里管,灌溉遮挡板43打开,从而将混有空气或二氧化碳的气体增压送入,补充氧气或二氧化碳。
本发明实现了水肥配比罐1的搅拌,防止堵塞,搅拌均匀,自动清理更换刷子,通过光照探头4,温湿度探头5实现检测,给水管6实现补充水,中层土壤水分探头7,表层土壤水分探头8,下层土壤水分探头9实现了对不同层进行检测,田间管道10分布在田地中,定量灌溉组件11实现了精准灌田,增压补给组件12利用文丘里原理实现增压补充,肥输出倒锥管道16实现了快速下落,施肥清堵组件17实现管道冲洗,搅拌清理移动轴18实现自由移动,搅拌固定支座19,搅拌旋转支座20,搅拌旋转导向环轨21,搅拌旋转垂直中心轴22实现搅拌工作工位23,搅拌清理工位24的变化,搅拌搅龙25实现搅拌,搅拌工艺沟槽26方便附着物掉落,搅拌摆动倾斜刷27实现了快速切向清理水肥附着物,搅拌清理喷嘴28实现吹风清理,搅拌固定架29为载体,搅拌连接弹簧30实现了振动晃动,搅拌下拍板31实现与毛刷拍击清理,搅拌敲击锤32实现振动清理,灌溉毛细纤维38实现了渗水保持湿润,灌溉充气泵管路39实现补充气体及松动,灌溉出口存储头41实现定期灌溉,灌溉V型出液口42,形成V口,从而方便打开,灌溉遮挡板43实现密封,灌溉上遮盖板44遮挡土壤。
本发明充分描述是为了更加清楚的公开,而对于现有技术就不再一一列举。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;作为本领域技术人员对本发明的多个技术方案进行组合是显而易见的。而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
- 基于机器学习的光智能水肥一体机及工艺
- 基于机器学习的光智能水肥一体机