一种基于北斗系统的农业机组运动状态识别系统及方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及农机信息采集与分析决策领域,特别是一种基于北斗系统的农业机组运动状态识别系统及方法。
背景技术
随着我国农业机械化的发展,质量效益型农业机械化已经成为政府及农业生产者追求的目标,农业机组时间利用率和技术生产率是衡量机组质量效益的重要指标。而识别农业机组的运动状态是计算机组时间利用率和技术生产率的前提和基础,因此更高效精确地采集相关参数,识别农业机组作业过程中的运动状态,是定量研究农业机组时间利用率和技术生产率的技术基础。
现有技术中,在识别农业机组运动状态方面,有基于GPS和机组发动机数据判别农业机组作业状态、田间转移状态和怠速状态;还有根据采样点的空间紧密程度及瞬时油耗等确定农机田间作业状态。这些技术主要实现了农业机组的故障监测及查询,但不能区分机组运动和静止状态,更不能识别农业机组作业过程中发生的各种运动状态,且技术较为复杂。
发明内容
本发明的目的是要解决现有技术中存在的不足,提供一种基于北斗系统的农业机组运动状态识别系统及方法,可获取相关测试数据,实时识别农业机组作业过程中的各种状态,为识别农业机组的运动状态提供科学适用测试系统及方法。
为达到上述目的,本发明是按照以下技术方案实施的:
一种基于北斗系统的农业机组运动状态识别系统,包括农业机组,所述基于北斗系统的农业机组运动状态识别系统还包括高精度北斗/GPS双模农机定位模块、密桢图像采集模块、高精度箱底压力测试模块、无线数据传输模块、车载信息控制终端和服务器;
所述高精度北斗/GPS双模农机定位模块安装在农业机组上,用于采集农业机组所处地块的定位信息和农业机组作业过程位置信息、作业轨迹及对应时刻,并通过无线数据传输模块与车载信息控制终端进行数据传输;
所述密桢图像采集模块安装在农业机组上且具有一定高度,用于进行360 度旋转拍摄,采集农业机组停机时的作业现场密桢图片,并通过无线数据传输模块与车载信息控制终端进行数据传输;
所述高精度箱底压力测试模块安装在带有物料箱的农业机组的物料箱底部,用于采集物料箱内物料对箱体底部的压力信息,并通过无线数据传输模块与车载信息控制终端进行数据传输;
所述车载信息控制终端,包括平板电脑及其内置有密帧图像采集模块的控制软件,所述平板电脑安装在农业机组的驾驶室内,用于接收并暂存高精度北斗/GPS双模农机定位模块、密桢图像采集模块、高精度箱底压力测试模块采集的数据信息,并通过无线数据传输模块与服务器连接进行数据传输;所述密帧图像采集模块的控制软件用于依据北斗定位信息识别农业机组作业过程中出现静止状态,立即启动密帧图像采集模块旋转360度拍摄农业机组停机时作业现场的图片,旋转拍摄的帧频密度可根据实际情况设置,反之识别农业机组在作业过程中从静止变为移动状态,立即关闭密帧图像采集模块;
所述服务器包括电脑和安装在电脑内的机组运动状态识别软件,所述电脑用于接收并存储车载信息控制终端传输的数据信息,机组运动状态识别软件通过分析处理数据信息以识别出农业机组的运动状态。
进一步地,所述农业机组的运动状态包括农业机组的移动状态和停机状态,所述农业机组的移动状态包括正常作业状态、地头转弯状态和地块转移状态,所述农业机组的停机状态包括工艺停机状态、故障停机状态、检查保养停机状态、换班停机状态、组织不当停机状态。
进一步地,所述无线数据传输模块包括Zigbee模块和GPRS模块,所述高精度北斗/GPS双模农机定位模块、密桢图像采集模块和高精度箱底压力测试模块的数据信息通过Zigbee模块传输至车载信息控制终端;车载信息控制终端和服务器之间通过GPRS模块进行数据传输。
另外,本发明还提供了一种基于北斗系统的农业机组运动状态识别方法,利用上述基于北斗系统的农业机组运动状态识别系统进行识别,包括以下步骤:
S1.根据高精度北斗/GPS双模农机定位模块采集的地块位置信息和农业机组作业过程位置信息、作业轨迹及对应时刻,判断农业机组在作业地块中的运动状态,即农业机组的移动状态和停机状态;
S2.当农业机组在作业地块中直线移动时,此时农业机组在作业地块中为正常作业状态;
S3.当农业机组在作业地块中的地头曲线移动时,此时农业机组运动状态为地头转弯状态;
S4.当农业机组移动驶离当前作业地块,转移至另一作业地块时,此时其运动状态为地块转移状态;
S5.当农业机组在作业地块中停止移动时,根据农业机组停机时作业机械物料箱底部压力变化或作业现场的密帧图片判断不同停机状态;
S6.对于带有物料箱的作业机械同时观测其物料对于物料箱底部压力变化情况判断机组是否处于工艺停机状态,对于收获机组,若其粮箱底部压力减少,则该机组为卸粮工艺停机状态,对于播种、施肥、施药机组,若物料箱底部压力增大,则为加种、加肥或加药工艺停机状态;
S7.对于农业机组其他的停机状态,依据密桢图像采集模块获取的密桢图片,以人工观察图片的方式判断具体停机原因,包括故障停机状态、检查保养停机状态、换班停机状态、组织不当停机状态。
与现有技术相比,本发明具有以下有益效果:
本发明由车载信息控制终端接收高精度北斗/GPS双模农机定位模块、密桢图像采集模块和高精度箱底压力测试模块通过Zigbee模块传输的数据信息,并通过GPRS模块将数据信息发送至服务器,由服务器中的机组运动状态识别软件实时识别出农业机组的运动状态;通过本发明可以为研究农业机组的运动状态提供科学监测及方法。
附图说明
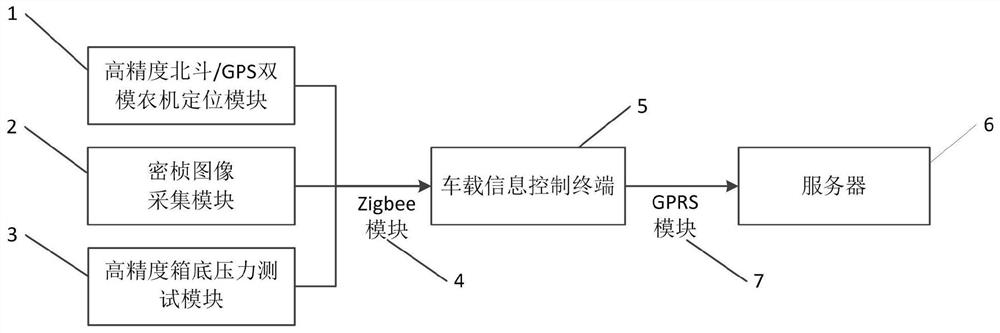
图1为本发明的基于北斗系统的农业机组运动状态识别系统的结构框图。
图2为本发明的基于北斗系统的农业机组运动状态识别方法实施流程图。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步的详细说明。此处所描述的具体实施例仅用于解释本发明,并不用于限定发明。
实施例1
如图1所示,本实施例提供了一种基于北斗系统的农业机组运动状态识别系统,包括农业机组,所述基于北斗系统的农业机组运动状态识别系统还包括高精度北斗/GPS双模农机定位模块1、密桢图像采集模块2、高精度箱底压力测试模块3、无线数据传输模块、车载信息控制终端5和服务器6;
所述高精度北斗/GPS双模农机定位模块1安装在农业机组合适位置,用于采集农业机组所处地块的定位信息和农业机组作业过程位置信息、作业轨迹及对应时刻,为识别农业机组的移动状态以及停机状态提供技术基础,并通过 Zigbee模块4与车载信息控制终端5进行数据传输;本实施例中,高精度北斗 /GPS双模农机定位模块1可以根据需要安装于动力机械的合适位置,通过接收北斗卫星信号精准采集地块位置及其长宽等数据信息,和以秒为单位精准采集农业机组作业过程的位置信息及对应时刻,所述地块位置及其长宽等数据信息是由装有高精度北斗/GPS双模农机定位模块1的农业机组围绕作业地块移动一周得到的移动轨迹而实现。
所述密桢图像采集模块2安装在农业机组上且具有一定高度,可进行360 度旋转拍摄,采集农业机组停机时的作业现场密桢图片,并通过Zigbee模块4 与车载信息控制终端5进行数据传输;
所述高精度箱底压力测试模块3安装在带有物料箱的农业机组的物料箱底部(例如播种机的种箱及肥箱底部、喷药机组的药箱底部和收获机的粮箱底部),用于采集物料箱内物料对箱体底部的压力信息,为识别相应机组的工艺停机状态提供技术基础,并通过Zigbee模块4与车载信息控制终端5进行数据传输;该高精度箱底压力测试模块3还应具有放水防腐、不易生锈等特性。
所述车载信息控制终端5,包括平板电脑及其内置有密帧图像采集模块的控制软件,所述平板电脑安装在农业机组的驾驶室内,用于接收并暂存高精度北斗/GPS双模农机定位模块1、密桢图像采集模块2、高精度箱底压力测试模块3 采集的数据信息,并通过GPRS模块7与服务器6连接进行数据传输;所述密帧图像采集模块的控制软件用于依据北斗定位信息识别农业机组作业过程中出现静止状态,立即启动密帧图像采集模块旋转360度拍摄农业机组停机时作业现场的图片,旋转拍摄的帧频密度可根据实际情况设置,反之识别农业机组在作业过程中从静止变为移动状态,立即关闭密帧图像采集模块;
所述服务器6包括电脑和安装在电脑内的机组运动状态识别软件,所述电脑用于接收并存储车载信息控制终端5传输的数据信息,机组运动状态识别软件通过分析处理数据信息以识别出农业机组的运动状态,农业机组的运动状态包括农业机组的移动状态和停机状态,所述农业机组的移动状态包括正常作业状态、地头转弯状态和地块转移状态,所述农业机组的停机状态包括工艺停机状态、故障停机状态、检查保养停机状态、换班停机状态、组织不当停机状态。
实施例2
如图2所示,本实施例还提供了一种基于北斗系统的农业机组运动状态识别方法,利用上述基于北斗系统的农业机组运动状态识别系统进行识别,包括以下步骤:
S1.根据高精度北斗/GPS双模农机定位模块采集的地块位置信息和农业机组作业过程位置信息、作业轨迹及对应时刻,判断农业机组在作业地块中的运动状态,即农业机组的移动状态和停机状态;
S2.当农业机组在作业地块中直线移动时,此时农业机组在作业地块中为正常作业状态;
S3.当农业机组在作业地块中的地头曲线移动时,此时农业机组运动状态为地头转弯状态;
S4.当农业机组移动驶离当前作业地块,转移至另一作业地块时,此时其运动状态为地块转移状态;
S5.当农业机组在作业地块中停止移动时,根据农业机组停机时作业机械物料箱底部压力变化或作业现场的密帧图片判断不同停机状态;
S6.对于带有物料箱的作业机械同时观测其物料对于物料箱底部压力变化情况判断机组是否处于工艺停机状态,对于收获机组,若其粮箱底部压力减少,则该机组为卸粮工艺停机状态,对于播种、施肥、施药机组,若物料箱底部压力增大,则为加种、加肥或加药工艺停机状态;
S7.对于农业机组其他的停机状态,依据密桢图像采集模块获取的密桢图片,以人工观察图片的方式判断具体停机原因,包括故障停机状态、检查保养停机状态、换班停机状态、组织不当停机状态。
本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
- 一种基于北斗系统的农业机组运动状态识别系统及方法
- 一种基于Android平台的运动状态识别系统和方法