一种多旋翼无人机技能训练设备
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及无人机技能训练设备技术领域,尤其涉及一种多旋翼无人机技能训练设备。
背景技术
无人机(UAV)是无人航空器(UnmannedAerialVehicle)的简称,是一种不载操作人员、用空气动力产生运载工具升力、能够自主或遥控飞行、能够一次使用或回收并且载有杀伤或非杀伤有效载荷的有动力的航空器,总的来说,分为固定翼无人机、无人直升机和多旋翼无人机三大类,其中,多旋翼无人机是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机。
无人机的操作涉及起飞、降落、上升、下降、俯仰、偏航等等,然而,对于无人机的初学者来说,要熟练掌握无人机的这些操作,则需要进行大量的训练,若直接使用无人机在空中训练,则容易由于操作不熟练或者操作不当导致无人机坠毁,因此,本发明提供一种多旋翼无人机技能训练设备。
发明内容
为了解决上述背景技术中所提到的问题,而提出的一种多旋翼无人机技能训练设备。
为了实现上述目的,本发明采用了如下技术方案:
一种多旋翼无人机技能训练设备,包括底座和无人机本体,所述底座顶部固定连接有多个支撑杆,所述支撑杆顶部固定连接有顶板,所述底座顶部通过多个弹簧弹性连接有支撑板,所述支撑板顶部转动安装有多个伸缩杆,多个所述伸缩杆的自由端转动连接有调节箱,所述调节箱上设有固定无人机本体的夹持装置;
多个所述支撑杆顶部均贯穿有水平设置的U形杆,所述U形杆的自由端固定连接有弧形杆,所述弧形杆上可拆卸安装有风扇;
所述无人机本体底部固定连接有连接柱,所述夹持装置包括位于连接柱两侧的夹紧臂,所述调节箱内部在水平方向上依次开设有第一凹槽、第三滑槽和第二凹槽,所述调节箱内部开设有位于第一凹槽两侧的第一滑槽,所述第三滑槽内滑动连接有滑板,两侧所述第一滑槽内均滑动连接有第一滑块,所述滑板和第一滑块之间通过连杆转动连接,所述夹紧臂的底部与连杆和第一滑块转动连接,所述调节箱内具有驱动滑板在竖直方向移动的驱动装置。
作为上述技术方案的进一步描述:
所述驱动装置包括转动安装在第二凹槽内的传动轴和驱动传动轴转动的驱动机构,所述传动轴的自由端固定连接有转盘,所述转盘上固定连接有偏心设置的第二滑块,所述滑板上具有与第二滑块滑动连接的第二滑槽。
作为上述技术方案的进一步描述:
所述驱动机构包括固定安装在传动轴上的蜗轮,所述第二凹槽内固定安装有驱动电机,所述驱动电机的输出轴传动连接有与蜗轮啮合连接的蜗杆。
作为上述技术方案的进一步描述:
所述连接柱两侧具有与夹紧臂水平端相适配的定位槽。
作为上述技术方案的进一步描述:
所述U形杆竖直端的中部固定连接有穿过支撑杆的第一定位杆,所述第一定位杆上开设有多个第一定位孔,所述支撑杆上具有穿过第一定位孔的第一定位螺栓。
作为上述技术方案的进一步描述:
所述弧形杆上开设有第四滑槽,所述风扇一端具有与第四滑槽相适配的第二定位杆,所述弧形杆上开设有多个第二定位孔,所述弧形杆上具有穿过第二定位孔和第二定位杆的第二定位螺栓。
作为上述技术方案的进一步描述:
多个所述支撑杆绕底座的中心线等角度分布。
作为上述技术方案的进一步描述:
多个所述伸缩杆绕支撑板的中心线等角度分布。
作为上述技术方案的进一步描述:
所述第一凹槽一侧具有两个水平设置的第一滑槽。
作为上述技术方案的进一步描述:
所述第一滑槽的宽度大于第一凹槽的宽度。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,在弹簧的弹性作用下,使得支撑板处于不稳定状态,同时,在伸缩杆的伸缩作用下,使得调节箱处于同样处于不稳定状态,通过夹持装置将无人机本体固定在调节箱上,从而使得使用者既可以操作无人机本体进行飞行训练,而又有一定的支撑,避免操作失误造成无人机本体坠毁的问题。
2、本发明中,通过驱动装置驱动滑板在竖直方向上向下运动,在连杆的作用下,推动两侧的第一滑块相互靠近移动,进而带动两侧的夹紧臂靠近连接柱,从而通过两侧的夹紧臂将无人机本体固定在调节箱上,同理当滑板在竖直方向上向下运动时,解除夹紧臂对无人机本体的固定,便于无人机本体的拆装,从而便于安装不同的无人机本体在训练设备上进行技能训练。
3、本发明中,通过调节风扇的位置,以及调节风扇的扇叶转动速度,来调节风向和风速,最大程度化的模拟有风环境,以提高使用者操作无人机本体飞行时的训练效果。
附图说明
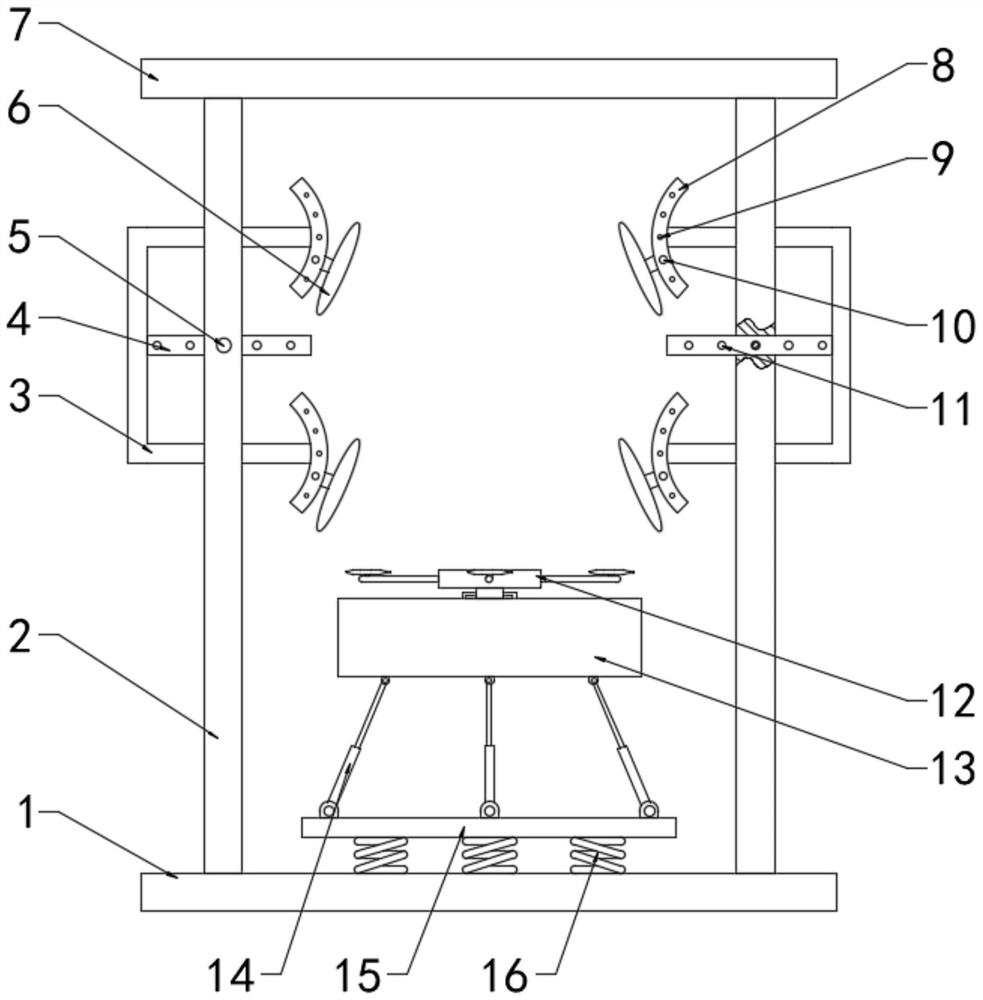
图1示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的结构示意图;
图2示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的调节箱在第一凹槽处的正视示意图;
图3示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的调节箱在第三滑槽处的侧视示意图;
图4示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的调节箱在第一滑槽处的侧视示意图;
图5示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的无人机本体的俯视示意图;
图6示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的弧形杆的剖视示意图;
图7示出了根据本发明实施例提供的一种多旋翼无人机技能训练设备的底座的俯视示意图。
图例说明:
1、底座;2、支撑杆;3、U形杆;4、第一定位杆;5、第一定位螺栓;6、风扇;7、顶板;8、弧形杆;9、第二定位孔;10、第二定位螺栓;11、第一定位孔;12、无人机本体;13、调节箱;14、伸缩杆;15、支撑板;16、弹簧;17、连接柱;18、定位槽;19、夹紧臂;20、第一凹槽;21、第二滑块;22、第三滑槽;23、滑板;24、第二滑槽;25、连杆;26、第一滑块;27、第一滑槽;28、第二凹槽;29、传动轴;30、蜗轮;31、蜗杆;32、驱动电机;33、转盘;34、第四滑槽;35、第二定位杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一
请参阅图1-7,本发明提供一种技术方案:一种多旋翼无人机技能训练设备,包括底座1和无人机本体12,底座1顶部固定连接有多个支撑杆2,多个支撑杆2绕底座1的中心线等角度分布,支撑杆2顶部固定连接有顶板7,底座1顶部通过多个弹簧16弹性连接有支撑板15,支撑板15顶部转动安装有多个伸缩杆14,多个伸缩杆14的自由端转动连接有调节箱13,多个伸缩杆14绕支撑板15的中心线等角度分布,调节箱13上设有固定无人机本体12的夹持装置;
在弹簧16的弹性作用下,使得支撑板15处于不稳定状态,同时,在伸缩杆14的伸缩作用下,使得调节箱13处于同样处于不稳定状态,通过夹持装置将无人机本体12固定在调节箱13上,从而使得使用者既可以操作无人机本体12进行飞行训练,而又有一定的支撑,避免操作失误造成无人机本体12坠毁的问题;
多个支撑杆2顶部均贯穿有水平设置的U形杆3,U形杆3的自由端固定连接有弧形杆8,弧形杆8上可拆卸安装有风扇6;
通过调节风扇6的位置,以及调节风扇6的扇叶转动速度,来调节风向和风速,最大程度化的模拟有风环境,以提高使用者操作无人机本体12飞行时的训练效果;
无人机本体12底部固定连接有连接柱17,夹持装置包括位于连接柱17两侧的夹紧臂19,调节箱13内部在水平方向上依次开设有第一凹槽20、第三滑槽22和第二凹槽28,调节箱13内部开设有位于第一凹槽20两侧的第一滑槽27,第一凹槽20一侧具有两个水平设置的第一滑槽27,第一滑槽27的宽度大于第一凹槽20的宽度,第三滑槽22内滑动连接有滑板23,两侧第一滑槽27内均滑动连接有第一滑块26,滑板23和第一滑块26之间通过连杆25转动连接,夹紧臂19的底部与连杆25和第一滑块26转动连接,调节箱13内具有驱动滑板23在竖直方向移动的驱动装置;
通过驱动装置驱动滑板23在竖直方向上向下运动,在连杆25的作用下,推动两侧的第一滑块26相互靠近移动,进而带动两侧的夹紧臂19靠近连接柱17,从而通过两侧的夹紧臂19将无人机本体12固定在调节箱13上;
通过驱动装置驱动滑板23在竖直方向上向上运动,在连杆25的作用下,推动两侧的第一滑块26相互远离移动,进而带动两侧的夹紧臂19远离连接柱17,解除夹紧臂19对无人机本体12的固定,便于无人机本体12的拆装,从而便于安装不同的无人机本体12在训练设备上进行技能训练。
请参阅图1-3,驱动装置包括转动安装在第二凹槽28内的传动轴29和驱动传动轴29转动的驱动机构,传动轴29的自由端固定连接有转盘33,转盘33上固定连接有偏心设置的第二滑块21,滑板23上具有与第二滑块21滑动连接的第二滑槽24;
驱动机构包括固定安装在传动轴29上的蜗轮30,第二凹槽28内固定安装有驱动电机32,驱动电机32的输出轴传动连接有与蜗轮30啮合连接的蜗杆31;
通过驱动电机32驱动蜗杆31转动,根据卡齿的啮合传动原理,驱动蜗轮30带动传动轴29和转盘33转动,进而带动第二滑块21转动,由于第二滑块21与第二滑槽24滑动连接,从而带动滑板23在竖直方向上运动,其中,根据蜗轮30和蜗杆31之间的自锁原理,实现夹紧臂19的定位目的。
请参阅图2,连接柱17两侧具有与夹紧臂19水平端相适配的定位槽18,提高夹紧臂19与连接柱17之间的定位稳定性,从而提高无人机本体12在调节箱13上的固定稳定性。
请参阅图1,U形杆3竖直端的中部固定连接有穿过支撑杆2的第一定位杆4,第一定位杆4上开设有多个第一定位孔11,支撑杆2上具有穿过第一定位孔11的第一定位螺栓5,通过调节第一定位螺栓5与不同位置的第一定位孔11连接,来调节U形杆3的水平位置,从而调节风扇6距离无人机本体12的远近,调节风向,从而以便于更好地模拟有风环境来提高训练效果。
请参阅图1和图6,弧形杆8上开设有第四滑槽34,风扇6一端具有与第四滑槽34相适配的第二定位杆35,弧形杆8上开设有多个第二定位孔9,弧形杆8上具有穿过第二定位孔9和第二定位杆35的第二定位螺栓10,通过调节第二定位杆35在第四滑槽34内滑动,来调节风扇6的角度,进一步实现风向调节,同时,通过调节第二定位螺栓10与不同位置第二定位杆35连接,定位风扇6。
工作原理:使用时,首先,通过驱动电机32驱动蜗杆31转动,根据卡齿的啮合传动原理,驱动蜗轮30带动传动轴29和转盘33转动,进而带动第二滑块21转动,由于第二滑块21与第二滑槽24滑动连接,从而带动滑板23在竖直方向上运动,其中,根据蜗轮30和蜗杆31之间的自锁原理,实现夹紧臂19的定位目的;
当滑板23在竖直方向上向下运动,在连杆25的作用下,推动两侧的第一滑块26相互靠近移动,进而带动两侧的夹紧臂19靠近连接柱17,从而通过两侧的夹紧臂19将无人机本体12固定在调节箱13上,而当滑板23在竖直方向上向上运动,在连杆25的作用下,推动两侧的第一滑块26相互远离移动,进而带动两侧的夹紧臂19远离连接柱17,解除夹紧臂19对无人机本体12的固定,便于无人机本体12的拆装,从而便于安装不同的无人机本体12在训练设备上进行技能训练;
其次,通过调节第一定位螺栓5与不同位置的第一定位孔11连接,来调节U形杆3的水平位置,从而调节风扇6距离无人机本体12的远近,调节风向,其次,通过调节第二定位杆35在第四滑槽34内滑动,来调节风扇6的角度,进一步实现风向调节,同时,通过调节第二定位螺栓10与不同位置第二定位杆35连接,定位风扇6,通过调节风扇6的位置,以及调节风扇6的扇叶转动速度,来调节风向和风速,最大程度化的模拟有风环境,以提高使用者操作无人机本体12飞行时的训练效果。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种多旋翼无人机技能训练设备
- 一种电子通信类专业技能训练设备