一种智能控制机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于智能机器人技术领域,具体是指一种智能控制机器人。
背景技术
随着国内生活水平的不断提高,扫地机器人走入平常百姓家,并被越来越多的人所接受,扫地机器人将在不久的将来像白色家电一样成为每个家庭必不可少的清洁帮手,产品也会由现在的初级智能向着更高程度的智能化程度发展,逐步的取代人工清洁。目前的扫地机器人在使用时往往只具备扫地的功能,而许多家庭在进行家务工作时往往需要听音乐或者观看电视,从而边做家务边打发时间,然而现有的机器人中功能单一,不能实现上述的效果。
发明内容
针对上述情况,为克服现有技术的缺陷,本发明提供了一种智能控制机器人,有效的解决了目前市场上扫地机器人功能单一的缺点,通过角度可以调节的支撑装置适应不同做家务的人群进行观看电视,从而实现打发时间与增加家务趣味的技术效果,是一种非常实用的智能控制机器人。
本发明采取的技术方案如下:本发明一种智能控制机器人,包括机器人本体、抽拉式灰尘箱、毛刷式垃圾收集装置、吸尘口、吸尘装置、灰尘吸附网、故障观察窗、升降支撑杆、音乐箱、角度调节支撑装置、抽拉把手和移动轮,所述移动轮铰接设于机器人本体上,所述抽拉式灰尘箱抽拉设于机器人本体上,所述毛刷式垃圾收集装置铰接设于机器人本体上,所述吸尘口设于机器人本体的底壁上,所述吸尘装置设于机器人本体上且设于抽拉式灰尘箱的上方,所述灰尘吸附网设于机器人本体上且设于吸尘装置的下方,所述故障观察窗设于机器人本体上且设于吸尘装置的上方,所述升降支撑杆设于机器人本体上,所述音乐箱设于升降支撑杆上,所述角度调节支撑装置铰接设于音乐箱上,所述抽拉把手设于抽拉式灰尘箱上,所述角度调节支撑装置包括铰接支撑杆、支撑连接杆、角度调节球、连杆和手机支撑架,所述铰接支撑杆设于音乐箱上,所述支撑连接杆铰接设于铰接支撑杆上,所述角度调节球设于支撑连接杆上,所述连杆铰接设于角度调节球上,所述手机支撑架设于连杆上,所述机器人本体起到支撑的作用,所述抽拉式灰尘箱起到收集灰尘与垃圾的作用,所述毛刷式垃圾收集装置起到将地面的垃圾集中的作用,所述吸尘口起到吸附的作用,所述吸尘装置起到产生气流将垃圾吸附进来的作用,所述灰尘吸附网起到将灰尘吸附住的作用,所述故障观察窗起到观察吸附装置使用状况的作用,所述升降支撑杆起到高度调节的作用,所述音乐箱起到播放音乐的作用,所述角度调节支撑装置起到支撑与调节角度的作用,所述铰接支撑杆起到支撑的作用,所述支撑连接杆起到支撑的作用,所述角度调节球起到连接的作用,所述连杆起到连接的作用,所述手机支撑架起到支撑用户手机的作用。
进一步地,所述毛刷式垃圾收集装置包括毛刷铰接杆、清洁毛刷和驱动控制器,所述毛刷铰接杆铰接设于机器人本体上,所述清洁毛刷设于毛刷铰接杆上,所述驱动控制器设于机器人本体上,所述毛刷铰接杆起到连接的作用,所述清洁毛刷起到清洁与手机垃圾的作用,所述驱动控制器起到控制的作用。
进一步地,所述吸尘装置包括吸尘支撑口、吸尘支撑杆、吸尘电机和吸尘扇,所述吸尘支撑口设于机器人本体上,所述故障观察窗设于吸尘支撑口内,所述灰尘吸附网设于吸尘支撑口内,所述吸尘支撑杆设于吸尘支撑口内,所述吸尘电机设于吸尘支撑杆上,所述吸尘扇设于吸尘电机的输出轴上,所述吸尘支撑口起到支撑的作用,所述吸尘支撑杆起到支撑的作用。
进一步地,所述连杆设于手机支撑架与角度调节球之间,所述角度调节球设于连杆与支撑连接杆之间,所述支撑连接杆设于角度调节球与铰接支撑杆之间,所述音乐箱设于支撑连接杆与升降支撑杆之间,所述升降支撑杆设于音乐箱与机器人本体之间,所述吸尘扇设于吸尘电机与灰尘吸附网之间,所述吸尘电机设于吸尘扇与故障观察窗之间,所述灰尘吸附网设于吸尘扇与抽拉式灰尘箱之间。
进一步地,所述机器人本体呈圆柱体设置,所述手机支撑架呈J型设置。
进一步地,所述清洁毛刷设有若干组,所述吸尘电机设有三组,所述吸尘扇设有若干组,所述抽拉式灰尘箱设有两组且呈对称设于机器人本体的两侧壁上,所述抽拉把手设有两组,所述升降支撑杆设有两组。
进一步地,作为优选的,所述故障观察窗采用玻璃材质设置,所述灰尘吸附网采用海绵材质设置。
采用上述结构本发明取得的有益效果如下:本方案一种智能控制机器人,有效的解决了目前市场上扫地机器人功能单一的缺点,通过角度可以调节的支撑装置适应不同做家务的人群进行观看电视,从而实现打发时间与增加家务趣味的技术效果,是一种非常实用的智能控制机器人。
附图说明
图1为本发明一种智能控制机器人的整体结构示意图;
图2为本发明一种智能控制机器人另一角度的结构示意图;
图3为本发明一种智能控制机器人的剖视图。
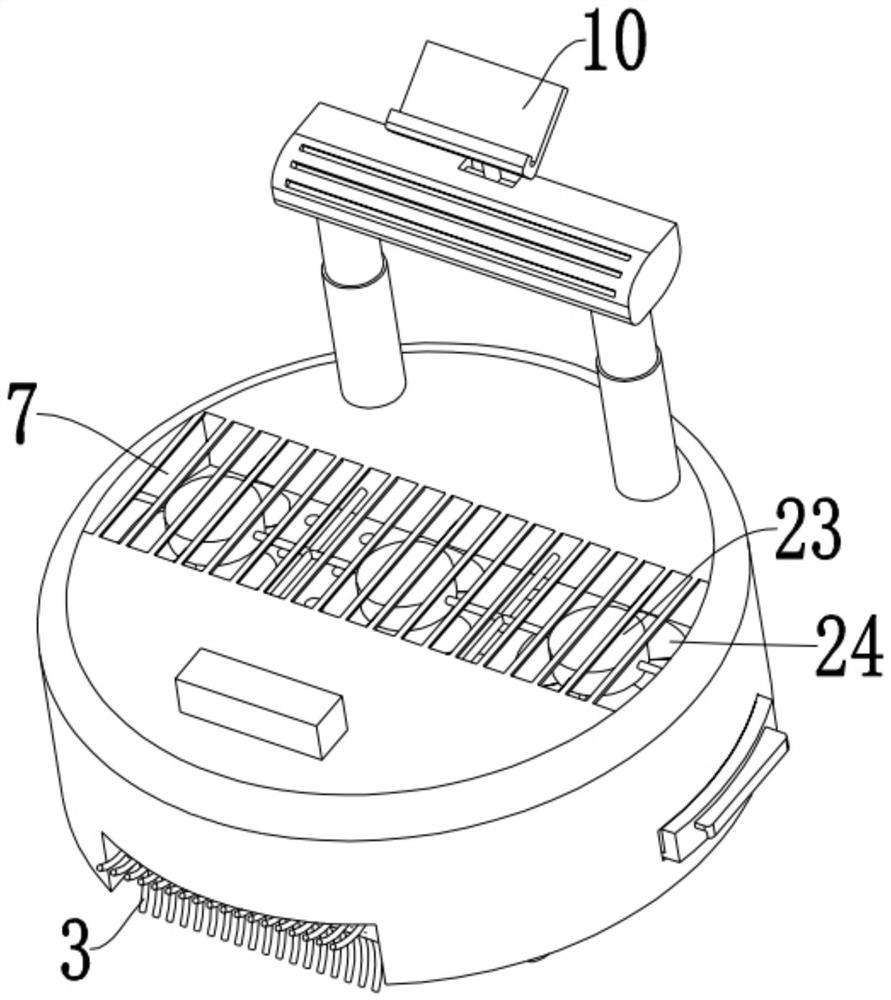
其中,1、机器人本体,2、抽拉式灰尘箱,3、毛刷式垃圾收集装置,4、吸尘口,5、吸尘装置,6、灰尘吸附网,7、故障观察窗,8、升降支撑杆,9、音乐箱,10、角度调节支撑装置,11、抽拉把手,12、移动轮,13、铰接支撑杆,14、支撑连接杆,15、角度调节球,16、连杆,17、手机支撑架,18、毛刷铰接杆,19、清洁毛刷,20、驱动控制器,21、吸尘支撑口,22、吸尘支撑杆,23、吸尘电机,24、吸尘扇。
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-3所示,本发明一种智能控制机器人,包括机器人本体1、抽拉式灰尘箱2、毛刷式垃圾收集装置3、吸尘口4、吸尘装置5、灰尘吸附网6、故障观察窗7、升降支撑杆8、音乐箱9、角度调节支撑装置10、抽拉把手11和移动轮12,所述移动轮12铰接设于机器人本体1上,所述抽拉式灰尘箱2抽拉设于机器人本体1上,所述毛刷式垃圾收集装置3铰接设于机器人本体1上,所述吸尘口4设于机器人本体1的底壁上,所述吸尘装置5设于机器人本体1上且设于抽拉式灰尘箱2的上方,所述灰尘吸附网6设于机器人本体1上且设于吸尘装置5的下方,所述故障观察窗7设于机器人本体1上且设于吸尘装置5的上方,所述升降支撑杆8设于机器人本体1上,所述音乐箱9设于升降支撑杆8上,所述角度调节支撑装置10铰接设于音乐箱9上,所述抽拉把手11设于抽拉式灰尘箱2上,所述角度调节支撑装置10包括铰接支撑杆13、支撑连接杆14、角度调节球15、连杆16和手机支撑架17,所述铰接支撑杆13设于音乐箱9上,所述支撑连接杆14铰接设于铰接支撑杆13上,所述角度调节球15设于支撑连接杆14上,所述连杆16铰接设于角度调节球15上,所述手机支撑架17设于连杆16上。
所述毛刷式垃圾收集装置3包括毛刷铰接杆18、清洁毛刷19和驱动控制器20,所述毛刷铰接杆18铰接设于机器人本体1上,所述清洁毛刷19设于毛刷铰接杆18上,所述驱动控制器20设于机器人本体1上。
所述吸尘装置5包括吸尘支撑口21、吸尘支撑杆22、吸尘电机23和吸尘扇24,所述吸尘支撑口21设于机器人本体1上,所述故障观察窗7设于吸尘支撑口21内,所述灰尘吸附网6设于吸尘支撑口21内,所述吸尘支撑杆22设于吸尘支撑口21内,所述吸尘电机23设于吸尘支撑杆22上,所述吸尘扇24设于吸尘电机23的输出轴上。
所述连杆16设于手机支撑架17与角度调节球15之间,所述角度调节球15设于连杆16与支撑连接杆14之间,所述支撑连接杆14设于角度调节球15与铰接支撑杆13之间,所述音乐箱9设于支撑连接杆14与升降支撑杆8之间,所述升降支撑杆8设于音乐箱9与机器人本体1之间,所述吸尘扇24设于吸尘电机23与灰尘吸附网6之间,所述吸尘电机23设于吸尘扇24与故障观察窗7之间,所述灰尘吸附网6设于吸尘扇24与抽拉式灰尘箱2之间。
所述机器人本体1呈圆柱体设置,所述手机支撑架17呈J型设置。
所述清洁毛刷19设有若干组,所述吸尘电机23设有三组,所述吸尘扇24设有若干组,所述抽拉式灰尘箱2设有两组且呈对称设于机器人本体1的两侧壁上,所述抽拉把手11设有两组,所述升降支撑杆8设有两组。
所述故障观察窗7采用玻璃材质设置,所述灰尘吸附网6采用海绵材质设置。
具体使用时,用户在做家务时,将机器人本体1放置在平整的地板上,随后将手机放置在手机支撑架17上,并通过调节手机支撑架17与连杆16在角度调节球15上的角度以实现对手机支撑架17的不同角度调节,从而适应用户不同的使用习惯,接着用户开启音乐箱9,音乐响播放音乐使得用户在家务工作过程中减轻烦躁感,同时用户可以通过将手机支撑架17上的手机与音乐箱9蓝牙连接,可以直接播放手机中的电视节目的声音,接着用户通过驱动控制器20开启毛刷铰接杆18使得毛刷铰接杆18转动,同时驱动控制器20控制移动轮12移动与吸尘电机23工作,此时毛刷铰接杆18带动清洁毛刷19转动,从而带动地面的垃圾被清洁毛刷19转动到机器人本体1的下方,随后机器人本体1在移动轮12的移动作用下,吸尘口4移动到垃圾的上方,此时吸尘电机23带动吸尘扇24工作从而产生气流,气流透过灰尘吸附网6经过吸尘抽拉式灰尘箱2和吸尘口4将垃圾吸附到抽拉式灰尘箱2内,同时垃圾中的灰尘在气流的作用下经过灰尘吸附网6时被灰尘吸附网6的海绵材质吸附住无法进入到吸尘支撑口21内,另外,用户可以通过故障观察窗7观察吸尘电机23的使用状况与故障情况,以便随时进行故障清理,以上便是整个智能控制机器人的使用流程。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种智能控制消防机器人
- 一种机器人柔性智能温控变色皮肤及智能控制系统