一种延时断电系统、无人设备和延时断电方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明实施例涉及电源供电技术领域,尤其涉及一种延时断电系统、无人设备和延时断电方法。
背景技术
无人车可应用于农业植保领域中,如无人车上挂载各种作业设备后可实现无人车喷洒药剂、撒播种子、肥料等。
电能作为清洁能源被应用于无人车,如通过能够存储电能的电池来驱动无人车动作。当前,在无人车上,为了防止无人车运行过程中发生意外时能够及时停止运行,通常在无人车上设置有急停开关,当发生意外,如无人车前面有深沟或者有障碍物时,通过按下急停开关来断开电池的输出,使得无人车上所有的用电设备断电,无人车急停而避免意外发生,然而,按下急停开关后断开所有用电设备的供电,导致部分需要延时断电的用电设备无法及时执行保存数据、复位等操作,造成需要延时断电的用电设备立刻断电发生故障。
发明内容
本发明实施例的目的在于:提供一种延时断电系统、无人设备和延时断电方法,以解决急停开关触发电池停止输出造成需要延时断电的用电设备发生故障的问题。
为达此目的,本发明实施例采用以下技术方案:
第一方面,提供一种延时断电系统,包括:
电源;
第一执行设备,所述第一执行设备通过电子开关与所述电源连接,所述第一执行设备为不需要延时断电的用电设备;
第二执行设备,所述第二执行设备与所述电源连接,所述第二执行设备为需要延时断电的用电设备;
急停开关,所述急停开关与所述电子开关连接,所述急停开关处于指定状态时控制所述电子开关截止;
控制器,所述控制器与所述急停开关、所述第二执行设备和所述电源通信连接,所述控制器用于在检测到所述急停开关处于所述指定状态时,向所述第二执行设备发送关机指令,以及在预设延时时长后向所述电源发送关机指令;
所述电源用于向所述第一执行设备和所述第二执行设备供电,以及在接收到关机指令时关机。
可选地,所述电子开关为MOS管。
可选地,所述电源通过总线与所述控制器、所述第二执行设备和所述第一执行设备通信连接。
可选地,所述控制器还用于:
接收延时时长的设置指令,并根据所述设置指令设置延时时长,所述设置指令包括所述延时时长的时长值。
可选地,所述控制器还用于:
在检测到所述急停开关处于所述指定状态时,判断是否设置有延时时长;
若是,执行向所述第二执行设备发送关机指令,以及在预设延时时长后向所述电源发送关机指令的步骤;
若否,向所述电源发送关机指令。
可选地,所述控制器还用于:
在与所述电源断开通信的时长大于预设时长时,向所述第二执行设备发送关机指令。
可选地,所述电源还用于:
在每次关机时,记录关机原因并生成日志发送到上位机。
第二方面,提供一种无人设备,所述无人设备包括第一方面任一项所述的延时断电系统。
第三方面,提供一种延时断电方法,应用于第二方面所述的无人设备,所述延时断电方法包括:
检测急停开关的状态;
在检测到所述急停开关的状态为指定状态时,向第二执行设备发送关机指令,所述第二执行设备在接收到所述关机指令后执行关机操作;
在预设延时时长后向电源发送关机指令,所述电源在接收到关机指令时关机。
可选地,在向第二执行设备发送关机指令之前,还包括:
在检测到所述急停开关处于所述指定状态时,判断是否设置有延时时长;
若是,执行向所述第二执行设备发送关机指令的步骤;
若否,向所述电源发送关机指令。
可选地,还包括:
在检测到所述急停开关的状态不是所述指定状态时,判断与所述电源断开通信的时长是否大于预设时长;
若是,向所述第二执行设备发送关机指令;
若否,返回检测所述急停开关的状态的步骤。
本发明实施例的延时断电系统,不需要延时断电的第一执行设备通过电子开关与电源连接,需要延时断电的第二执行设备与电源连接,急停开关与电子开关连接,急停开关在指定状态时控制电子开关截止,控制器与急停开关、电源、第二执行设备通信,控制器在检测到急停开关处于指定状态时,向第二执行设备发送关机指令,以及在预设延时时长后向电源发送关机指令。一方面,急停开关被按下处于指定状态时通过控制电子开关截止以使得第一执行设备立即断电,第一执行设备能够急停来避免意外发生,另一方面,控制器可以在急停开关被按下时通过发送关机指令来通知需要延时断电的第二执行设备执行关机操作,并且在延时时长之后发送关机指令来控制电源关机,使得第二执行设备能够在延时时长内执行关机前的数据保存、复位等关机操作,即第二执行设备能够在急停开关按下后延时关机,避免第二执行设备断电关机发生故障,保证了第二执行设备的运行安全。
附图说明
下面根据附图和实施例对本发明作进一步详细说明。
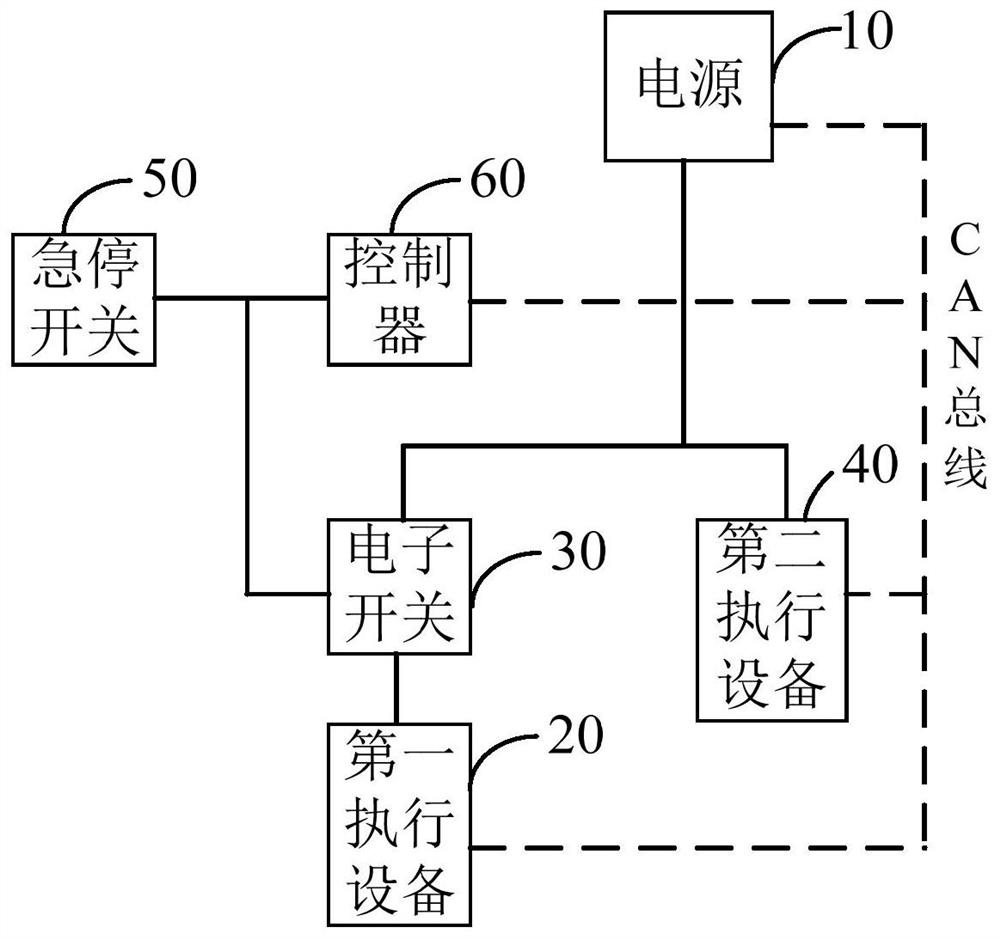
图1为本发明实施例一的一种延时断电系统的结构框图。
图2为本发明实施例二的一种延时断电方法的步骤流程图。
图3为本发明实施例三的一种延时断电方法的步骤流程图。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例一
图1为本发明实施例一的一种延时断电系统的结构框图,如图1所示,本发明实施例的延时断电系统包括电源10、第一执行设备20、电子开关30、第二执行设备40、急停开关50和控制器60。
本发明实施例中,电源10可以是智能电源,例如可以是智能电池,如可以是智能锂电池、铅蓄电池等,电源10可以自动实现开机和关机,即通过发送指令到电源10可以控制电源10开关或者关机。
第一执行设备20可以是无人设备上不需要延时断电的用电设备,需要说明的是,无人设备是指无需人员操作即可以自动运行的设备,示例性地,无人设备可以是无人车、无人船或者机器人等,无人设备可以无需人员操作,但遇到紧急情况时监控人员可以按下无人设备上的急停开关,为了方便说明,本发明实施例以无人设备为无人车作为示例。在无人车上,第一执行设备20可以是驱动无人车移动的底盘模块,该底盘模块可以包括电机和控制电机的控制模块,底盘模块需要断电时立即断电从而使得无人车断电即停止移动,以避免发生意外,当然,第一执行设备20还可以是无人车上其他断电急停的设备。
第二执行设备40可以是无人车上需要延时断电的用电设备,示例性地,第二执行设备40可以是无人车上的各种处理器、存储器等关机前需要保存数据、备份数据或者复位的电子元件,第二执行设备40还可以是断电前需要执行保护动作的设备,如喷洒装置的阀门在断电前需要关闭。
在实际应用中,本领域技术人员可以根据实际需要将无人车上的用电设备分为不需要延时断电的第一执行设备和需要延时断电的第二执行设备,本发明实施例对第一执行设备和第二执行设备不加以限制,对第一执行设备和第二执行设备的数量也不加以限制。
电子开关30可以是通过控制端控制电子开关30导通或者截止的开关,可选地,电子开关30可以是三极管、MOS管、继电器等,优选地,电子开关30可以是MOS管,MOS管相对于继电器等机械开关,MOS管无机械触点吸合,避免了电子开关30导通瞬间发生打火、产生电弧和电磁干扰等现象。
急停开关50可以是机械按钮或者机械按键,当急停开关50被按下时,急停开关50被按下的状态为指定状态。
本发明实施例中,第一执行设备20可以通过电子开关30与电源10连接,第二执行设备40与电源10连接,急停开关50与电子开关30连接,控制器60与急停开关50、第二执行设备40和电源10通信连接,控制器60在检测到急停开关50处于指定状态时,向第二执行设备40发送关机指令,以及在预设延时时长后向电源10发送关机指令,使得第二执行设备40在接收到关机指令时执行关机操作,电源10在接收到关机指令时关机以停止输出电流。
本发明实施例延时断电的原理如下:
如图1所示,电源10的输出端分为两路输出,一路输出通过电子开关30连接到不需要延时断电的第一执行设备20,一路输出连接到需要延时断电的第二执行设备40,其中,电子开关30的控制端与急停开关50连接,控制器60的一个引脚与急停开关50连接,急停开关50被按下处于按下状态时,急停开关50与电子开关30和控制器60的连接点的电位被拉低至地,使得电子开关30的控制端处于低电平,电子开关30截止,电源10无法向第一执行设备20供电,第一执行设备20停止运行,即实现了急停开关50被按下时第一执行设备20立即停止运行,示例性地,第一执行设备20为无人车的底盘模块,从而可以实现急停开关50被按下,无人车的底盘模块即停止运行,无人车急停可以避免无人车碰撞障碍物、农作物等。同时,控制器60与急停开关50连接的引脚在急停开关50被按下时处于低电平,控制器60通过该低电平检测到急停开关50被按下,控制器60通过与第二执行设备40的通信将关机指令发送到第二执行设备40,第二执行设备40执行数据保存、复位等关机操作,控制器60在预设延时时长后,通过与电源10的通信将关机指令发送到电源10,电源10接收到关机指令后停止向外输出电流,使得无人车上所有的用电设备断电关机。
本发明实施例的延时断电系统,一方面,急停开关被按下处于指定状态时通过控制电子开关截止以使得第一执行设备立即断电,第一执行设备能够急停来避免意外发生,另一方面,控制器可以在急停开关被按下时通过发送关机指令来通知需要延时断电的第二执行设备执行关机操作,并且在延时时长之后发送关机指令来控制电源关机,使得第二执行设备能够在延时时长内执行关机前的数据保存、复位等关机操作,即第二执行设备能够在急停开关按下后延时关机,避免第二执行设备断电关机发生故障,保证了第二执行设备的运行安全。
如图1所示,在本发明的可选实施例中,电源10通过总线与控制器60、第二执行设备40和第一执行设备10通信连接,优选地,电源10设置有CAN总线,控制器60、第二执行设备40和第一执行设备10可以挂接在CAN总线上,CAN(控制器局域网络,Controller AreaNetwork)是ISO国际标准化的串行通信协议,CAN总线是一种有效支持分布式控制或实时控制的串行通信网络,被广泛应用于车辆上控制模块与设备之间的数据交换,是一种多主设备总线,CAN总线上任意节点挂载的设备可以在任意时刻主动地向总线上其它节点挂载的设备发送信息而不分主次,因此可在各节点挂载的设备之间实现自由通信。
在本发明的另一可选实施例中,控制器60还可以接收延时时长的设置指令,并根据设置指令设置延时时长的时长值,在一个示例中,用户可以通过地面站设置延时时长的时长值,通过地面站将延时时长的时长值以设置指令发送到无人车上的通信模块,该通信模块将设置指令广播到CAN总线上,控制器60接收到该设置指令后设置延时时长的时长值,从而使得用户可以根据无人车上不同的第二执行设备40设置不同的延时时长,如果控制器60没有设置延时时长,可以默认第二执行设备40不需要延时断电。
进一步地,控制器60还用于在检测到急停开关50处于指定状态时,判断是否设置有延时时长,若是,向第二执行设备40发送关机指令,以及在预设延时时长后向电源10发送关机指令,若否,向电源10发送关机指令。具体地,如果控制器60没有设置延时时长,说明第二执行设备40不需要延时断电,当检测到急停开关50被按下处于指定状态时,控制器60通过CAN总线向电源10发送关机指令,使得电源10关机停止输出电流,适用于无人车上没有需要延时断电的执行设备,无人车需要急停场景。
在本发明的可选实施例中,电源10可以按照预设周期通过CAN总线与控制器60通信,当控制器60检测到与电源10断开通信时开始计时,如果断开通信的时长大于预设的时长,如超过3秒,控制器60通过CAN总线向第二执行设备40发送关机指令,第二执行设备40接收到关机指令后关机,可以避免电源10与控制器60通信断开,急停开关50被按下处于指定状态时,控制器60无法将关机指令发送到电源10,电源10仍然向外输出电流,导致第二执行设备40无法紧急断电关机的情况。
在本发明的另一可选实施例中,电源10在每次关机时,记录关机原因并生成日志发送到上位机,具体地,关机原因可以包括正常关机,如用户关闭电源,急停关机,如急停开关50被按下后的急停关机,当然还可以包括其他原因,如电量对于预设电量导致的关机、温度过高导致的关机、通信故障导致的关机等,电源10在每次关机时生成日志,该日志可以包括关机原因、时间、关机时长等,电源10可以通过无人车的通信系统将日志发送到上位机,通过上位机展示日志,用户可以根据展示的日志对电源关机原因进行分析,方便故障排查和回溯。
本发明实施例的延时断电系统,电源通过电子开关向第一执行设备供电,以及直接向第二执行设备供电,急停开关控制电子开关截止,控制器可以检测急停开关的状态,急停开关被按下处于指定状态时控制电子开关截止以使得第一执行设备立即断电,第一执行设备能够急停来避免意外发生,同时,控制器可以在急停开关被按下时通过发送关机指令来通知需要延时断电的第二执行设备执行关机操作,并且在延时时长之后发送关机指令来控制电源关机,使得第二执行设备能够在延时时长内执行关机前的数据保存、复位等关机操作,即第二执行设备能够在急停开关按下后延时关机,避免第二执行设备断电关机发生故障,保证了第二执行设备的运行安全,另外,控制器控制电源关机,能够断开除了电源以外的所有执行设备的电压,使得无人设备的急停更加安全和彻底。
实施例二
如图2所示为本发明实施例的一种延时断电方法的步骤流程图。本发明实施例的延时断电方法应用于无人设备,该无人设备包括实施例一的延时断电系统,如图1所示,该延时断电系统包括电源10、第一执行设备20、电子开关30、第二执行设备40、急停开关50和控制器60,本发明实施例用于上述无人设备的延时断电方法可以包括如下步骤:
S201、检测所述急停开关的状态。
如图1所示,本发明实施例的控制器的一个引脚与急停开关连接,通过该引脚可以检测急停开关的状态,在一个示例中,急停开关包括被按下状态和未被按下状态,急停开关未被按下时,电子开关导通,电源向第一执行设备供电,控制器与急停开关连接的引脚的电平为高电平,当急停开关被按下时,控制器与急停开关连接的引脚的电平被拉低至地,电平为低电平,控制器可以通过该引脚的电平来检测急停开关是处于被按下状态或未被按下状态。
S202、在检测到所述急停开关的状态为指定状态时,向第二执行设备发送关机指令,所述第二执行设备在接收到所述关机指令后执行关机操作。
在本发明实施例中,指定状态可以是急停开关被按下状态,具体地,控制器与急停开关连接的引脚处于低电平时,控制器可以确定急停开关处于指定状态,当急停开关处于指定状态时,电子开关截止,电源停止向第一执行设备停止供电,第一执行设备急停,其中,以无人设备为无人车为示例,第一执行设备为无人车上不需要延时断电的用电设备,第二执行设备为无人车上需要延时断电的用电设备,当检测到急停开关的状态为指定状态时,控制器向第二执行设备发送关机指令,第二执行设备接收到关机指令后执行数据保存、复位、保护动作等关机操作。
S203、在预设延时时长后向电源发送关机指令,所述电源在接收到关机指令时关机。
无人车上可以挂载有多个需要断电延时的第二执行设备,多个第二执行设备需要一定的时间执行数据保存、复位、保护动作等关机操作,延时时长可以是多个第二执行设备中需要延时时长最长的时长,控制器在检测到急停开关处于指定状态时开始启动计时器来统计时长,当统计的时长大于或等于预设延时时长时,向电源发送关机指令,使得电源在接收到关机指令后关机以停止输出电流。
本发明实施例的延时断电方法应用于延时断电系统,控制器检测急停开关的状态,在检测到急停开关的状态为指定状态时,向第二执行设备发送关机指令,第二执行设备在接收到关机指令后执行关机操作,在预设延时时长后向电源发送关机指令,电源在接收到关机指令时关机,一方面,急停开关被按下处于指定状态时通过控制电子开关截止以使得第一执行设备立即断电,第一执行设备能够急停来避免意外发生,另一方面,控制器可以在急停开关被按下时通过发送关机指令来通知需要延时断电的第二执行设备执行关机操作,并且在延时时长之后发送关机指令来控制电源关机,使得第二执行设备能够在延时时长内执行关机前的数据保存、复位等关机操作,即第二执行设备能够在急停开关按下后延时关机,避免第二执行设备断电关机发生故障,保证了第二执行设备的运行安全,另外,控制器控制电源关机,能够断开除了电源以外的所有执行设备的电压,使得无人设备的急停更加安全和彻底。
实施例三
图3为本发明实施例三提供的一种延时断电方法的步骤流程图,本发明实施例在前述实施例二的基础上进行优化,具体地,如图3所示,本发明实施例的延时断电方法可以包括如下步骤:
S301、检测所述急停开关的状态。
在本发明实施例中,控制器的一个引脚与急停开关连接,急停开关的状态可以包括被按下状态和未被按下状态,急停开关未被按下时控制器的引脚为高电平,急停开关被按下时控制器的引脚为低电平,控制器可以通过引脚的电平来检测急停开关的状态为被按下状态或未被按下状态。
S302、在检测到所述急停开关处于所述指定状态时,判断是否设置有延时时长。
在本发明的可选实施例中,控制器可以接收设置延时时长的设置指令,并根据设置指令中的时长值设置延时时长,从而可以使得用于可以根据不同的第二执行设备设置不同的延时时长值。示例性地,以无人设备为无人车作为示例,无人车上可以挂载有需要延时断电的执行设备,则控制器设置有延时时长,当无人车没有挂载有需要延时断电的执行设备时,控制器可以不设置延时时长,急停开关的指定状态可以是急停开关被按下状态,控制器在检测到急停开关处于指定状态时,可以判断是否设置有延时时长,若是,执行S303,若否执行S305。
S303、向第二执行设备发送关机指令,所述第二执行设备在接收到所述关机指令后执行关机操作。
在本发明实施例中,如果急停开关的状态为指定状态,说明急停开关被按下,电子开关截止,电源停止向第一执行设备停止供电,第一执行设备急停,此时,控制器可以向第二执行设备发送关机指令,第二执行设备接收到关机指令后执行数据保存、复位、保护动作等关机操作。其中,第一执行设备为无人车上不需要延时断电的用电设备,第二执行设备为无人车上需要延时断电的用电设备。
S304、在预设延时时长后向电源发送关机指令,所述电源在接收到关机指令时关机。
具体地,控制器在检测到急停开关处于指定状态时开始启动计时器来统计时长,当统计的时长大于或等于预设延时时长时,向电源发送关机指令,使得电源在接收到关机指令后关机以停止输出电流。
S305、向所述电源发送关机指令。
如果控制器没有设置延时时长,说明无人车上没有需要延时断电的执行设备,当检测到急停开关被按下处于指定状态时,控制器向电源发送关机指令,使得电源关机停止输出电流,适用于无人车上没有需要延时断电的执行设备,无人车需要急停场景。
本发明实施例的延时断电方法,检测急停开关的状态,在检测到急停开关处于指定状态时,判断是否设置有延时时长,若是,向第二执行设备发送关机指令,第二执行设备在接收到关机指令后执行关机操作,并在预设延时时长后向电源发送关机指令,电源在接收到关机指令时关机,若否,向电源发送关机指令。一方面,急停开关被按下处于指定状态时通过控制电子开关截止以使得第一执行设备立即断电,第一执行设备能够急停来避免意外发生,另一方面,控制器可以在急停开关被按下时通过发送关机指令来通知需要延时断电的第二执行设备执行关机操作,并且在延时时长之后发送关机指令来控制电源关机,使得第二执行设备能够在延时时长内执行关机前的数据保存、复位等关机操作,即第二执行设备能够在急停开关按下后延时关机,避免第二执行设备断电关机发生故障,保证了第二执行设备的运行安全,另外,控制器控制电源关机,能够断开除了电源以外的所有执行设备的电压,使得的急停更加安全和彻底。
进一步地,在控制器没有存储有延时时长时,直接向电源发送关机指令来控制电源关机停止输出电流,适用于无人设备上没有需要延时断电的执行设备,无人设备需要急停场景。
在本发明的另一可选实施例中,在检测到急停开关的状态不是指定状态时,判断与电源断开通信的时长是否大于预设时长,若是,向第二执行设备发送关机指令,具体地,电源可以按照预设周期与控制器通信,当控制器检测到与电源断开通信时开始计时,如果断开通信的时长大于预设的时长,控制器可以向第二执行设备发送关机指令,第二执行设备接收到关机指令后关机,可以避免电源与控制器通信断开,急停开关被按下处于指定状态时,控制器无法将关机指令发送到电源,电源仍然向外输出电流,导致第二执行设备无法紧急断电关机的情况。
于本文的描述中,术语“第一”、“第二”,仅仅用于在描述上加以区分,并没有特殊的含义。
在本说明书的描述中,参考术语“一实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚器件,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以适当组合,形成本领域技术人员可以理解的其他实施方式。
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
- 一种延时断电系统、无人设备和延时断电方法
- 一种延时断电开关系统及其延时断电方法