一种单轴气浮平台摩擦式自动制动系统及方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及单轴气浮平台摩擦式自动制动系统及方法。
背景技术
单轴气浮平台是用于模拟卫星在太空中无阻力状态,进而进行卫星控制系统地面验证的重要设备。单轴气浮台在实验过程中,经常需要卸载角动量,完成制动。然而,目前制动过程大多采用人为手动干预的方法,无法精确施加阻尼,造成单轴气浮台角动量卸载不完全,致使制动失败,极大影响实验效果。因此,无需人为干预的自动制动系统是单轴气浮台发展的重要瓶颈之一。
发明内容
本发明的目的是为了解决现有单轴气浮平台制动过程中,手动干预导致角动量卸载不完全,致使制动失败的问题,而提出一种单轴气浮平台摩擦式自动制动系统及方法。
一种单轴气浮平台摩擦式自动制动系统包括两个制动系统和一个单轴气浮平台基体;
制动系统采用步进电机推杆机构,步进电机推杆机构包括:连接铝管、端盖、薄膜压力传感器、橡胶接触头、电动推杆和固定块;
单轴气浮平台基体包括:上方工作面、下方固定基座和中心转轴;
所述连接铝管一端与电动推杆固定相连,另一端与端盖固定相连;
所述端盖与橡胶接触头相连;
在端盖与橡胶接触头之间设置薄膜压力传感器,用于反馈接触头顶端压力;
电动推杆上设置固定块;
在单轴气浮平台基体的上方工作面下端设置一组对称两个制动系统;
所述单轴气浮平台的上方工作面、下方固定基座和中心转轴同轴心设置。
一种单轴气浮平台摩擦式自动制动方法具体过程为:
步骤一:制动系统启动前,电动推杆处于收缩状态,橡胶接触头与单轴气浮平台基体的下方固定基座未接触;
当制动系统启动后,橡胶触头向外伸出,当薄膜压力传感器采集到正压力,即橡胶触头与单轴气浮平台基体接触后,转至步骤二;
步骤二:采集此时单轴气浮平台基体的上方工作面旋转角速度,如果旋转角速度在误差允许范围内,则转至步骤五;
否则根据单轴气浮平台基体的上方工作面旋转角速度反馈量产生期望压力值P
步骤三:根据薄膜压力传感器采集的压力信号P及步骤二得到的期望压力值P
步骤四:电动推杆以伸缩速度期望值v
步骤五:将橡胶接触头收缩至安全距离,制动过程完成。
本发明的有益效果为:
本发明一种单轴气浮平台摩擦式自动制动系统包括两个制动系统和一个单轴气浮平台基体;制动系统采用步进电机推杆机构,步进电机推杆机构包括:连接铝管、端盖薄膜压力传感器、橡胶接触头、电动推杆和固定块;单轴气浮平台基体包括:上方工作面、下方固定基座和中心转轴。
本发明一种单轴气浮平台摩擦式自动制动方法采用:
步骤一:制动系统启动前,电动推杆处于收缩状态,橡胶接触头与单轴气浮平台基体的下方固定基座未接触;当制动系统启动后,橡胶触头向外伸出,当薄膜压力传感器采集到正压力,即橡胶触头与单轴气浮平台基体接触后,转至步骤二;步骤二:采集此时单轴气浮平台基体的上方工作面旋转角速度,如果旋转角速度在误差允许范围内,则转至步骤五;否则根据单轴气浮平台基体的上方工作面旋转角速度反馈量产生期望压力值,执行步骤三;步骤三:根据薄膜压力传感器采集的压力信号及步骤二得到的期望压力值,计算橡胶接触头伸缩速度期望值;步骤四:电动推杆以伸缩速度期望值向前运动,使橡胶接触头以期望压力值接触单轴气浮平台基体的下方固定基座,产生摩擦力,卸载单轴气浮平台的上方工作面的角动量,之后转至步骤二;步骤五:将橡胶接触头收缩至安全距离,制动过程完成。
通过引入压力、转速反馈,闭环控制制动系统的运动,自动调节制动阻尼,减少人工干预,降低手动制动过程中的干扰力矩输入,有效提高单轴气浮台的制动效果。解决现有单轴气浮平台制动过程中,手动干预导致角动量卸载不完全,致使制动失败的问题。
附图说明
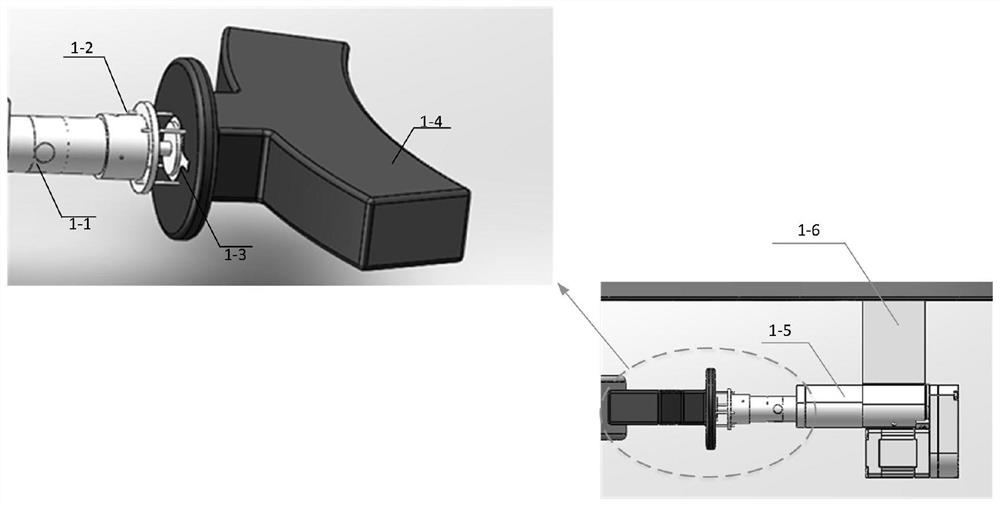
图1为本发明接触头结构图;
图2为本发明气浮平台制动系统放置方式示意图;
图3为本发明制动控制流程图。
具体实施方式
具体实施方式一:本实施方式一种单轴气浮平台摩擦式自动制动系统包括两个制动系统1和一个单轴气浮平台基体2;
制动系统1采用步进电机推杆机构,步进电机推杆机构包括:连接铝管1-1、端盖1-2、薄膜压力传感器1-3、橡胶接触头1-4、电动推杆1-5和固定块1-6;
单轴气浮平台基体2包括:上方工作面2-1、下方固定基座2-2和中心转轴2-3;
所述连接铝管1-1一端与电动推杆1-5固定相连,另一端与端盖1-2固定相连;
所述端盖1-2与橡胶接触头1-4相连;
在端盖1-2与橡胶接触头1-4之间设置薄膜压力传感器1-3,用于反馈接触头顶端压力;
电动推杆1-5上设置固定块1-6;
在单轴气浮平台基体2的上方工作面2-1下端设置一组对称两个制动系统1;
所述单轴气浮平台2的上方工作面2-1、下方固定基座2-2和中心转轴2-3同轴心设置。
具体实施方式二:本实施方式与具体实施方式一不同的是:所述连接铝管1-1、端盖1-2、薄膜压力传感器1-3、橡胶接触头1-4、电动推杆1-5同轴心设置。
其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是:所述单轴气浮平台基体2的上方工作面2-1下端与制动系统1通过固定块1-6固连。
其它步骤及参数与具体实施方式一或二相同。
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是:所述制动系统1的橡胶接触头1-4与单轴气浮平台2的下方固定基座2-2位于同一水平线上。
其它步骤及参数与具体实施方式一至三之一相同。
具体实施方式五:结合图1、图2、图3说明本实施方式,本实施方式一种单轴气浮平台摩擦式自动制动方法具体过程为:
步骤一:制动系统1启动前,电动推杆1-5处于收缩状态,橡胶接触头1-4与单轴气浮平台基体2的下方固定基座2-2未接触;
当制动系统1启动后,橡胶触头1-4向外伸出,当薄膜压力传感器采集到正压力,即橡胶触头与单轴气浮平台基体2接触后,开始运行如图3所示的压力、速度调节过程,转至步骤二;
步骤二:采集此时单轴气浮平台基体2的上方工作面2-1旋转角速度,如果旋转角速度在误差允许范围内,则转至步骤五;
否则根据单轴气浮平台基体2的上方工作面2-1旋转角速度反馈量产生期望压力值P
步骤三:根据薄膜压力传感器1-3采集的压力信号P及步骤二得到的期望压力值P
步骤四:电动推杆1-5以伸缩速度期望值v
步骤五:将橡胶接触头1-4收缩至安全距离,制动过程完成。
制动系统与气浮台之间的放置方式如图2所示。
具体实施方式六:本实施方式与具体实施方式五不同的是:所述期望压力值P
P
其中,K
其它步骤及参数与具体实施方式六相同。
具体实施方式七:本实施方式与具体实施方式五或六不同的是:所述橡胶接触头1-4伸缩速度期望值v
v
其中,e
其它步骤及参数与具体实施方式五或六相同。
具体实施方式八:本实施方式与具体实施方式五至七之一不同的是:所述步骤二中误差允许范围为测量到的旋转角速度与单轴气浮平台基体2的上方工作面2-1采集的旋转角速度的差值,误差允许范围为小于10
其它步骤及参数与具体实施方式五至七之一相同。
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 一种单轴气浮平台摩擦式自动制动系统及方法
- 一种单轴气浮平台摩擦式自动制动系统及方法