一种智能仿生狗
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及智能机器人领域,尤其涉及一种智能仿生狗。
背景技术
“仿生机器人”是指模仿生物、从事生物特点工作的机器人。如目前现有的仿生机器狗可以担任导盲任务,解决导盲犬价格昂贵,训练周期长,难以普及等难题,具有广阔的开发前景。现有的仿生机器狗虽能实现平面步行和转向,但由于机械腿抬起速度慢且幅度有限,存在难以跨越障碍物的技术问题。当遇到凹凸不平的环境以及斜坡、楼梯等,仿生机器狗的稳定性差,难以克服复杂的地形。
发明内容
本发明的目的在于提出一种智能仿生狗,以解决上述问题。
为达此目的,本发明采用以下技术方案:
一种智能仿生狗,包括主架和四个机械腿组件,各个所述机械腿组件分别包括固定座、第一电机、第二电机、第三电机、第一摆杆、第二摆杆、第一连杆、第二连杆和支承杆;所述第一电机与所述第二电机相向地固定在所述固定座的两侧;所述第一电机用于驱动所述第一摆杆转动;所述第二电机用于驱动所述第二摆杆转动;所述第三电机用于驱动所述固定座上下摆动;所述第一摆杆和所述第二摆杆位于所述第一电机和第二电机之间,所述第一摆杆与所述第二摆杆同轴转动;所述第一摆杆与所述第一连杆的顶端铰接,所述第一连杆的底端与所述支承杆铰接;所述第二连杆与所述第一连杆相平行,所述第二连杆的顶部与所述第二摆杆固定连接,所述第二连杆与所述第二摆杆的延伸方向一致,所述第二连杆的底端与所述支承杆铰接。
进一步,还包括摄像头、雷达、运动传感器和主控芯片;所述摄像头设置在所述主架的前端,与所述主控芯片通信连接,用于从周围环境中找出目标物体和测出到目标物体的距离,得到目标物体的位置信息,并将目标物体的位置信息反馈至主控芯片;所述雷达设置在所述主架的顶部,与所述主控芯片通信连接,用于扫描周围一圈均匀分布点的信息,测出当前空间信息,并将当前空间信息反馈至所述主控芯片;所述运动传感器与所述主控芯片通信连接,所述运动传感器用于测出当前姿态信息并反馈至所述主控芯片;所述主控芯片用于接收所述摄像头反馈的目标物体的位置信息、所述雷达反馈的当前空间信息以及运动传感器反馈的姿态信息,并依据当前空间信息和目标物体的位置信息规划出到达目标物体的路径;所述主控芯片还用于根据姿态信息和到达目标物体的路径,并基于步态算法和PID算法控制所述第一电机、第二电机和第三电机的输出量。
进一步,所述固定座包括第一座体、第二座体和连接柱,所述第一座体用于固定所述第一电机,所述第二座体用于固定所述第二电机,所述连接柱用于连接所述第一座体和所述第二座体,所述第一座体与所述第三电机传动连接。
进一步,所述支承杆的底端设有脚垫。
进一步,所述主控芯片由STM32405单片机芯片和STM32103单片机芯片组成。
进一步,所述运动传感器为MPU-6050。
进一步,所述摄像头为支持Python的机器视觉模块。
本发明提供的智能仿生狗,各个机械腿组件中的第一摆杆、第二摆杆、第一连杆、第二连杆和支承杆构成平行四边形的传动机构,通过第一电机和第二电机改变第一摆杆与第二摆杆之间的夹角,既能实现抬腿动作和张腿运动。通过四个机械腿组件之间抬腿和张腿,配合完成步行任务和转向任务,实现模仿四足生物行动。通过第三电机带动固定座上摆动,使第一电机、第二电机、第一摆杆、第二摆杆、第一连杆、第二连杆和支承杆同步的提起,实现支承杆能直接快速地提起,且增大支承杆的提起幅度,大大提高智能仿生狗跨越障碍的能力,有效克服机械脚抬起速度慢且幅度受限而导致无法跨越障碍物的技术问题。当遇到凹凸不平的地形时,多个第三电机对应的上下摆动对应调整四个支承杆的高低位置,以保持主架平衡,大大提高了智能仿生狗的平稳性,利于智能仿生狗克服复杂的地形。
附图说明
附图对本发明做进一步说明,但附图中的内容不构成对本发明的任何限制。
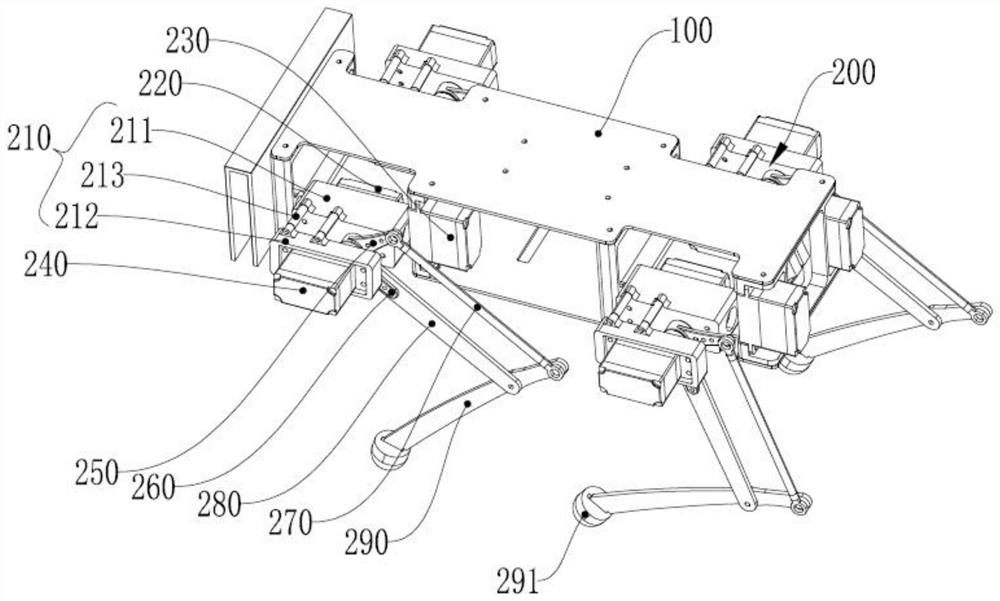
图1是本发明中一个实施例的结构示意图;
图2是本发明中一个实施例的雷达检测到障碍的示意图;
图3是本发明中一个实施例的雷达没有检测到障碍的示意图;
图4是本发明中一个实施例的爬坡算法的分析示意图;
图5是本发明中一个实施例的PID算法的流程示意图。
附图中:100-主架、200-机械腿组件、210-固定座、211-第一座体、212-第二座体、213-连接柱、220-第一电机、230-第二电机、240-第三电机、250-第一摆杆、260-第二摆杆、270-第一连杆、280-第二连杆、290-支承杆、291-脚垫。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
如图1所示,本实施例的一种智能仿生狗,包括主架100和四个机械腿组件200,各个所述机械腿组件200分别包括固定座210、第一电机220、第二电机230、第三电机240、第一摆杆250、第二摆杆260、第一连杆270、第二连杆280和支承杆290。所述第一电机220与所述第二电机230相向地固定在所述固定座210的两侧。所述第一电机220用于驱动所述第一摆杆250转动。所述第二电机230用于驱动所述第二摆杆260转动。所述第三电机240用于驱动所述固定座210上下摆动。所述第一摆杆250和所述第二摆杆260位于所述第一电机220和第二电机230之间,所述第一摆杆250与所述第二摆杆260同轴转动。所述第一摆杆250与所述第一连杆270的顶端铰接,所述第一连杆270的底端与所述支承杆290铰接。所述第二连杆280与所述第一连杆270相平行,所述第二连杆280的顶部与所述第二摆杆260固定连接,所述第二连杆280与所述第二摆杆260的延伸方向一致,所述第二连杆280的底端与所述支承杆290铰接。
本发明提供的智能仿生狗,各个机械腿组件200中的第一摆杆250、第二摆杆260、第一连杆270、第二连杆280和支承杆290构成平行四边形的传动机构,通过第一电机220和第二电机230改变第一摆杆250与第二摆杆260之间的夹角,既能实现抬腿动作和张腿运动。通过四个机械腿组件200之间抬腿和张腿,配合完成步行任务和转向任务,实现模仿四足生物行动。通过第三电机240带动固定座210上摆动,使第一电机220、第二电机230、第一摆杆250、第二摆杆260、第一连杆270、第二连杆280和支承杆290同步的提起,实现支承杆290能直接快速地提起,且增大支承杆290的提起幅度,大大提高智能仿生狗跨越障碍的能力,有效克服机械脚抬起速度慢且幅度受限而导致无法跨越障碍物的技术问题。当遇到凹凸不平的地形时,多个第三电机240对应的上下摆动对应调整四个支承杆290的高低位置,以保持主架100平衡,大大提高了智能仿生狗的平稳性,利于智能仿生狗克服复杂的地形。
具体地,智能仿生狗还包括摄像头、雷达、运动传感器和主控芯片。所述摄像头设置在所述主架100的前端,与所述主控芯片通信连接,用于从周围环境中找出目标物体和测出到目标物体的距离,得到目标物体的位置信息,并将目标物体的位置信息反馈至主控芯片。本发明优选的实施例,摄像头根据记忆的形状去识别周围物体的形状,如果找到与记忆的形状相符合的目标物体,则进入下一步,反之继续寻找。当寻找到目标物体后,则计算形状范围内的颜色平均阈值,让其与记忆的颜色平均阈值相比较,如果在误差范围内,进入下一步,如果不在误差范围内,则忽略该物体,继续识别周围的物体。根据目标物体的形状和颜色的平均阈值,确定此时目标物体在摄像头中所占的像素点。根据目标物体的形状和所占像素点,估算该物体中心点在摄像头中的坐标点。最后计算摄像头到目标物体的距离,假设当时记忆物体时放置的距离为d,所占像素点为a,如今目标物体的距离为D,目标物体所占像素点为A。则根据公式D=A*d/a,得到摄像头到目标物体的距离。
所述雷达设置在所述主架100的顶部,与所述主控芯片通信连接,用于扫描周围一圈均匀分布点的信息,测出当前空间信息,并将当前空间信息反馈至所述主控芯片。具体地,本发明优选的实施例,雷达旋转测量一圈,平均分为16帧上报扫描信息帧,所以得到16帧的每帧起始角度分别是0°、22.5°、45°、67.5°、90°…270°、292.5°、315、337.5°、360°。16帧数据加起来是完整一圈,一圈的总点数=16*每帧的点数。每帧的总点数根据扫描信息帧计算距离个数可以得到(距离个数=总点数)。每帧数据点的信息(角度和距离):一帧中第N个点的距离是扫描信息帧中N距离值,那一帧中第N个点距离对应的角度=此帧起始角度+(N-1)*22.5/(每帧的总点数),这样一帧点信息所包含的角度和距离都有了,从而测出整个房间,或者是平面地形。如此,若智能仿生狗引导用户行走过程中,突然有障碍物如车辆冲出时,对比图2和图3,可以观察到,图2中雷达本应测得清晰的地形被遮挡,表示雷达识别到了障碍物,能及时地反馈给主控芯片。
所述运动传感器与所述主控芯片通信连接,所述运动传感器用于测出当前姿态信息并反馈至所述主控芯片。所述主控芯片用于接收所述摄像头反馈的目标物体的位置信息、所述雷达反馈的当前空间信息以及运动传感器反馈的姿态信息,并依据当前空间信息和目标物体的位置信息规划出到达目标物体的路径。所述主控芯片还用于根据姿态信息和到达目标物体的路径,并基于步态算法和PID算法控制所述第一电机220、第二电机230和第三电机240的输出量。其中,步态算法根据支承杆290的轨迹示意图得到下面的数学模型:
其中,T为步态周期,λ为支撑相占空比,通过时间参数t求得在X方向上,Y方向上的目标端点,目标端点,把两个参数输出给第一电机220和第二电机230即可实现基于步态算法基本运动系统。
值得说明的是,步态算法还包括爬坡算法,参照图4所示,以解算P1坐标为例介绍爬坡算法,首先计算主架100目标位置变换的RPY航海角变换矩阵,其中R代表滚转角(Roll),P代表仰俯角(Pitch),Y代表偏航角(Yaw)。可得到变换矩阵A,
其中,cR表示cosR,sR表示sinR,cP表示cosP,sP表示sinP,cY表示cosY,sY表示为sinY。
具体计算过程如下:
所以可以得到:
此时的
由于其他腿的逆解过程与此相同,在此不再赘述,将求解出的机身坐标系下的足末端坐标,代入足端逆解公式即公式可求解出电机的控制角度。
进一步,本实施例调节各个电机的方法是使用PID调节,由于考虑参数选定的简单性,使用纯P调节,通过多次仿真实验,发现补偿系数为0.2时调节效果较好。因此有如下公式
其中Rimu、Pimu为IMU(惯性检测单元)测量得到的机身与地面的横滚角与俯仰角差值,每次检测都补偿差值的0.2倍。
其中,PID算法因其简单的结构、较高的稳定性和便于调整的特性,得到了广泛的应用。图5为PID控制示意图,r(t)为输入量。e(t)为稳态误差量。u(t)为PID输出量。c(t)为实际输出量。PID的输入e(t)与输出u(t)的等式为:
在上式中,Kp为比例系数。T1为积分系数。TD为微分系数。
PID调节器原理简单、适应性强,实现自平平衡机器人的控制方案是完全可行的。在本系统中,Uk代表机器人的实时倾斜角。U代表机器人站立时的倾斜角。ek为实时倾斜角度值与期望值的误差。Kp、Ki和Kd分别为比例、积分和微分环节的系数。Pp、Pi和Pd分别为比例环节、积分环节和微分环节增益量。P为PID输出量,用来控制PWM波的占空比,实现电机的转速控制。
以计算X轴所需速度为例介绍PID控制算法:
V
其中本次偏差e(k)=V
如此,通过摄像头、雷达以及主控芯片的配合,规划出到达目标物体的路径后,根据步态算法和PID算法调整第一电机220、第二电机230和第三电机240的输出量,使智能仿生狗按照规划好的路线平稳步行穿越复杂的环境,走到目标物体处。当本实施例提供的智能仿生犬应用在导盲领域中,若智能仿生狗启动后,摄像头识别盲人用户的位置信息,雷达扫描当前空间信息,主控芯片根据盲人用户的位置信息和当前空间信息规划出到达用户的路径,按照规划好的路径自动地移动到盲人用户附近,指引用户行走。有效解决用户在启程时难以寻找到智能仿生狗的技术问题。
具体地,如图1所示,所述固定座210包括第一座体211、第二座体212和连接柱213,所述第一座体211用于固定所述第一电机220,所述第二座体212用于固定所述第二电机230,所述连接柱213用于连接所述第一座体211和所述第二座体212,所述第一座体211与所述第三电机240传动连接。如此,当第三电机240带动第一座体211向上摆动时,同时带动第二座体212向上摆动,使第一电机220、第二电机230、第一摆杆250、第二摆杆260、第一连杆270、第二连杆280和支承杆290同步的向上提起,实现支承杆290能直接提起,以提高智能仿生犬跨域障碍的能力,且本实施例的结构简单,方便组装,利于降低智能仿生狗的生产成本。
优选地,所述支承杆290的底端设有脚垫291。如此,通过在支承杆290的底端设置脚垫291,以避免支承杆290与地面硬性碰撞而磨损和弯曲,利于减少维修保养需求,且降低支承杆290的强度要求,降低生产材料的成本。
一些实施例中,所述主控芯片由STM32405单片机芯片和STM32103单片机芯片组成。由于STM32系列的单片机芯片的运算速度快,技术成熟,普及面广,采用两个STM32系列的芯片配合构成主控芯片控制,利于智能仿生狗及时反映变化的情况,保持行走的稳定性,且方便技术人员调控维修,降低维修成本。
优选地,所述运动传感器为MPU-6050。具体地,MPU-6050集成了三轴MEMS陀螺仪、三轴MEMS加速度计以及一个可扩展的数字运动处理器,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。
值得说明的是,所述摄像头为支持Python的机器视觉模块。如此,可在摄像头本身内置一些图像处理算法完成嵌入式的视觉识别与图像处理。例如基于April Tag标记跟踪追踪,因此,若标记贴在目标物体,如盲人用户身上时,摄像头既能识别出用户并测出到用户的实际距离,得出目标物体的位置信息。当标记转换成红色色块、绿色色块时,既能使摄像头识别出交通灯并测出到交通灯的距离。具体地,本发明优选的实施例,摄像头采用OpenMV摄像头,该款摄像头低价,可扩展,支持Python的机器视觉模块,是一个可编程的摄像头,通过Micro Python语言,可以实现逻辑算法。通过搭载Micro Python解释器,这允许在嵌入式上使用Python来编程(Python 3to be precise)。比如,直接调用find_blobs()方法,就可以获得一个列表,包含所有色块的信息。
根据本发明实施例的一种智能仿生狗的其他构成等以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
在本说明书的描述中,参考术语“实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种智能仿生狗
- 一种开源可编程的智能仿生机械狗