一种死鸡捡拾装置及控制系统和控制方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及禽类业设备领域,尤其涉及一种死鸡捡拾装置及控制系统。
背景技术
禽类养殖是我国改革开放以来发展速度最快的饲养业。随着养鸡场养殖规模逐渐扩大,对人工的需求量也随之增大,但鸡舍环境恶劣且工作强度较大,故而会出现劳动力短缺状况。另外如果工人长期在养鸡场工作,也会对自身的身体健康有一定影响。最后如果死鸡不能及时挑拣出去,可能会造成禽病疫病传播,也会造成大量经济损失。死鸡表皮质地柔软且姿势各异,想要利用机械爪等机械设备将其完好无损的拾捡出来难度较大。控制系统作为整个装置的核心,对作业效率及作业要求有着决定性的影响。
现有技术可以依据死鸡坐标将其捡拾出来,但是如何保证其表皮不被破坏且确定其就是死鸡是目前含难解决的技术问题。
所以,如何提供一种设计合理的死鸡捡拾装置及控制系统,代替人工对死鸡进行捡拾是目前本领域技术人员亟待解决的技术问题。
发明内容
有鉴于此,本发明提供了一种死鸡捡拾装置及控制系统,解决现有技术中存在的问题,具体方案如下:
一种死鸡捡拾装置,包括行走轮、装置本体以及设置在所述装置本体上的升降支架,与所述升降支架依次连接的为转向机构、伸缩连杆、机械臂以及机械手,所述机械手的下方还设有传感器。
具体的,本装置还包括设置在所述装置本体上方的控制系统以及配重块,所述配重块上方还设有死鸡回收笼。
具体的,所述装置本体内设有导航装置以及电源。
具体的,所述导航装置为电磁导航装置。
具体的,所述机械手为欠驱动死禽类捡拾机械手,包括自下而上依次设置的腕部、手掌部、手指部。
具体的,所述控制系统包括与微型计算机通讯连接的抓取系统、行走系统、升降伸缩装置、旋转装置、输入输出装置,所述微型计算机与控制中心实现无线通信连接。
具体的,所述抓取系统包括传感器、机械臂以及机械手,所述传感器包括压力传感器以及温度传感器;
所述行走系统包括电机、导航装置以及驱动电路。
具体的,所述行走系统采用四驱模式,所述行走系统由直流电机驱动器及四个直流电机驱动,所述导航装置的导航方式采用电磁导航,鸡舍内预先铺设电磁行走路线。
一种死鸡捡拾装置的控制方法,包括如下步骤:
S1:控制系统接收上位机发来的目标位置信息;
S2:控制系统通过所述位置信息确定死鸡捡拾装置的行进路径,同时调整机械臂的方向及高度,准备执行目标抓取操作;
S3:机械手与目标接触,通过传感器确认目标温度,判定是否为死鸡;
S4:在步骤S3中,如果判定结果为“否”,则直接跳入步骤S6中,如果判定结果为“是”,则机械手70的手指部继续闭合,由传感器的压力监测死鸡所受压力,当压力大于当前设定的最大压力的时候机械手停止闭合;
S5:当机械手7停止闭合后,由控制系统发出指令,机械手将夹持的死鸡放置到死鸡回收笼内;
S6:装置归位,等待下一次捡拾任务。
本发明提供的一种死鸡捡拾装置及控制系统和控制方法,具有以下有益效果:可以解决规模化养鸡场依靠人工捡拾死鸡的问题。2、由于机械手可以感知被夹物体所受压力大小,可防止死鸡表皮被破坏从而抑制传染病爆发。3、由于机械手可以感知被夹物体温度,可防止误抓活鸡。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
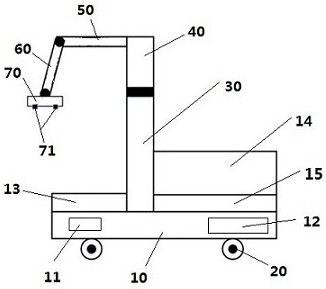
图1为死鸡捡拾装置的结构示意图。
图2为控制系统的模块示意图。
图3为死鸡捡拾方法流程图。
图中:10、装置本体 11、导航装置 12、电源 13、控制系统 14、死鸡回收笼15、配重块 20、行走轮 30、升降支架 40、转向机构 50、伸缩连杆 60、机械臂 70、机械手 71、传感器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-3所示,本发明请求保护一种死鸡捡拾装置及控制系统,包括行走轮20、装置本体10以及设置在所述装置本体10上的升降支架30,与所述升降支架30依次连接的为转向机构40、伸缩连杆50、机械臂60以及机械手70,所述机械手70的下方还设有传感器71。所述转向机构40具体为旋转装置,转向机构40可以实现水平方向360度的任意角度转动,用来调整机械臂60的方向,使其可以对捡拾装置两侧的笼内死鸡都能进行抓取。所述传感器71包括压力传感器和温度传感器,温度传感器用来判定所抓取的目标是否为死鸡,压力传感器用来保障机械手抓取时采用合适的压力,保证死鸡的表皮无溃破,从而达到防止禽病疫情传播的目的。升降支架30可使其对不同笼层内死鸡进行抓取。
具体的,本装置还包括设置在所述装置本体10上方的控制系统13以及防止侧翻的配重块15,所述配重块15上方还设有死鸡回收笼14。
具体的,所述装置本体10内设有导航装置11以及电源12。
具体的,所述导航装置11为电磁导航装置。
具体的,所述机械手70为欠驱动死禽类捡拾机械手,包括自下而上依次设置的腕部、手掌部、手指部。
本发明还请求保护一种死鸡捡拾装置的控制系统,它包括与微型计算机通讯连接的抓取系统、行走系统、升降伸缩装置、旋转装置、输入输出装置,所述微型计算机与控制中心实现无线通信连接,所述输入输出装置包括鼠标、键盘以及显示屏幕。
具体的,所述抓取系统包括传感器71、机械臂60以及机械手70,所述传感器包括压力传感器以及温度传感器;所述行走系统包括电机、导航装置11以及驱动电路。所述导航装置的导航方式采用电磁导航,鸡舍内预先铺设电磁行走路线。
当所述微型计算机无线通信模块接收控制中心(未图示)发来的死鸡位置坐标后,根据鸡舍铺设的电磁轨迹确定行进路线,本装置的所述行走系统启动,到达指定坐标后,由控制系统通过控制升降支架30、转向机构40、伸缩连杆50以及机械臂60控制机械手70的精确位置到达目标点进行抓取工作。
进一步的,所述行走系统采用四驱模式,所述行走系统由直流电机驱动器及四个直流电机驱动。
本发明还请求保护一种死鸡捡拾装置的控制方法,包括如下步骤:
S1:控制系统13接收上位机发来的目标位置信息;
S2:控制系统13通过所述位置信息确定死鸡捡拾装置的行进路径,同时调整机械臂60的方向及高度,准备执行目标抓取操作;
S3:机械手70与目标接触,通过传感器71确认目标温度,判定是否为死鸡;
S4:在步骤S3中,如果判定结果为“否”,则直接跳入步骤S6中,如果判定结果为“是”,则机械手70的手指部继续闭合,由传感器71的压力监测死鸡所受压力,当压力大于当前设定的最大压力阈值的时候机械手70停止闭合;
S5:当机械手70停止闭合后,由控制系统发出指令,机械手70将夹持的死鸡放置到死鸡回收笼14内;
S6:装置归位,等待下一次捡拾任务。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
- 一种死鸡捡拾装置及控制系统和控制方法
- 一种捡拾圆捆机控制装置、捡拾圆捆机及其控制方法