一种用于微型芯片制作的线性工业机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种用于微型芯片制作的线性工业机器人,属于机械自动化技术领域。
背景技术
目前,传统的PCB板冲压,需要人工上料,人工定位,人工下料,操作繁琐,效率低下,无法实现自动化批量生产。
由于芯片的微型化发展,因此对PCB的冲压质量、冲压过程中的定位精度提出了更高的要求。故,需要一种新的技术方案以满足该需求。
发明内容
发明目的:为克服现有技术中存在的不足之处,针对多PCB同步冲压提出一种用于微型芯片制作的线性工业机器人,用于实现自动化多PCB板同步冲压,从上料到下料,实现全自动化生产,同时配备高精度定位,大大提高PCB板冲压质量。
技术方案:本发明公开了一种用于微型芯片制作的线性工业机器人,包括供料机构、用于对原料进行定位的定位机构、抓取机构、用于带动抓取机构行进的行进机构和冲压机构;所述供料机构提供的原料位于定位机构的上方,所述抓取机构位于定位机构的上方,所述冲压机构位于定位机构的一侧,所述行进机构带动抓取机构在定位机构与冲压机构之间来回移动;
所述定位机构包括定位底座、用于放置原料的定位支架、设置在所述定位底座下表面且用于带动定位底座前进至供料机构处带回原料的平移进料模组、设置在所述定位底座上表面且用于对原料进行定位的多个定位板和多个定位气缸,所述定位板设置在定位支架四周,该定位板包括定位活动板和定位基准板,所述定位活动板与定位气缸连接,所述定位基准板固定设置在定位底座上。
进一步的,所述平移进料模组包括两组导向机构和用于驱动导向机构前进的电机,两组所述导向机构分别设置在定位底座下表面的两端,该导向机构包括受电机驱动运动的导轨和设置在导轨上的直线轴承,所述直线轴承与定位底座连接。
进一步的,所述抓取机构包括吸盘组件和用于固定吸盘组件的抓取支架,所述吸盘组件通过抓取支架固定在行进机构上。
进一步的,所述吸盘组件包括多个用于抓取原料边框的边框吸盘、多个用于抓取冲压件的冲压件吸盘和固定支架,各吸盘对应固定在固定支架上,该固定支架与抓取支架固连。
进一步的,所述行进机构包括固定杆和用于带动固定杆来回移动的平移机构,所述抓取机构固定在固定杆上,所述平移机构包括设置在所述固定杆背面的平移齿条、平移齿轮和带动所述平移齿轮转动的平移伺服电机,所述平移齿轮与平移齿条啮合,在平移齿轮转动过程中,平移齿条带动固定杆来回移动。
进一步的,所述抓取机构包括多个,多个抓取机构等间距固定在固定杆上。
进一步的,所述行进机构还包括用于带动固定杆上下移动的升降机构;该升降机构包括升降导杆、升降固定板、升降固定支架、升降齿条、升降主动轮、升降从动轮和升降伺服电机;所述升降固定板通过升降固定支架与固定杆固定连接,所述升降导杆设置在升降固定板的两端,该升降固定板可沿升降导杆上下运动,所述升降齿条竖直设置在升降固定板上,所述升降伺服电机驱动升降主动轮转动,所述升降主动轮带动升降从动轮旋转,所述升降从动轮与升降齿条啮合,在升降从动轮旋转过程中,升降齿条带动升降固定板上下移动。
进一步的,所述供料机构包括用于堆放原料的放置架、用于顶升原料的供料顶升气缸、设置在所述放置架上方的供料吸盘和驱动供料吸盘向下获取原料的供料吸盘升降气缸。
有益效果:本发明与现有技术相比,具有以下优点:
(1)由于所需得到的冲压件尺寸较小,因此对定位精度要求高,本发明通过定位基准板与定位活动板、定位活动板与定位气缸配合,当定位机构上存在原料时,定位气缸带动定位活动板行进至最大行程处,完成定位;
(2)本发明通过定位机构对获取到的原料进行精定位,而后通过抓取机构和行进机构将定位准确的原料移送至冲压机构进行冲压,得到冲压件,具有自动化程度高、工作效率高等优点;
(3)本发明通过采用用于抓取原料边框的边框吸盘和用于抓取冲压件的冲压件吸盘,当冲压结束后,可方便收集废料;
(4)本发明的平移机构和升降机构均通过齿条与齿轮进行配合,具有结构简单、传动效果佳、便于后期维修维护等优点。
附图说明
图1为本发明的供料机构结构示意图;
图2为本发明的定位机构结构示意图;
图3为本发明的定位机构内各组件的结构关系示意图;
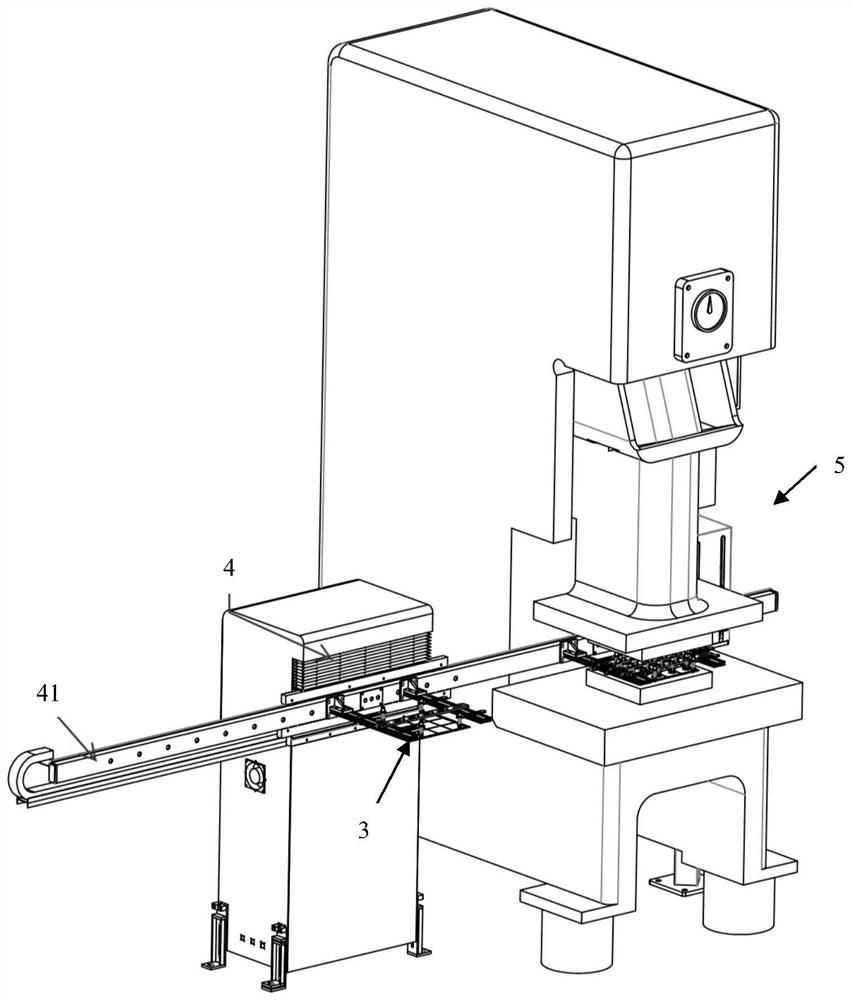
图4为本发明的平移机构、升降机构、冲压机构位置示意图;
图5为本发明的吸盘组件结构示意图;
图6为本发明的冲压件吸盘结构示意图;
图7为本发明的行进机构的俯视图;
图8为本发明的行进机构的立体图。
具体实施方式
下面结合附图对本发明做进一步说明。
本发明实现自动化多PCB板同步冲压,具体结构包括供料机构1、用于对原料进行定位的定位机构2、抓取机构3、用于带动抓取机构3行进的行进机构4和冲压机构5;参见图1和图4,供料机构1提供的原料位于定位机构2的上方,抓取机构3位于定位机构2的上方,冲压机构5位于定位机构2的一侧,行进机构4带动抓取机构3在定位机构2与冲压机构5之间来回移动。
现结合图1和图2,对本发明的供料机构1和定位机构2的结构进行说明。图1所述的供料机构1包括用于堆放原料11的放置架12、用于顶升原料11的供料顶升气缸13、设置在放置架12上方的供料吸盘14和驱动供料吸盘14向下获取原料的供料吸盘升降气缸15。原料11一层层叠放在放置架12上,供料顶升气缸13将叠放的原料进行整体顶升,使供料吸盘14在供料吸盘升降气缸15的驱动下,能够正好获取位于最上方的原料,供料吸盘14获取到原料后在供料吸盘升降气缸15的驱动下上升,等待定位机构2。如图1、图2和图3所示的定位机构2包括定位底座21、用于放置原料的定位支架22、设置在定位底座21下表面且用于带动定位底座21前进至供料机构1处带回原料的平移进料模组29、设置在定位底座21上表面且用于对原料进行定位的多个定位板和多个定位气缸23,如图3所示,定位支架22为具有多镂空区域的框架结构,包括但不限于为丰字型结构,各定位板依次设置在镂空区域内,用于包围原料进行定位,本发明的定位板包括定位活动板24和定位基准板25,定位活动板24与定位气缸23连接,定位基准板25固定设置在定位底座21上,即如图3所示,定位活动板构成一条边,与其对应的另一边一定是定位基准板25构成的边。参见图2,平移进料模组29包括两组导向机构和用于驱动导向机构前进的伺服电机26,两组导向机构分别设置在定位底座21下表面的两端,该导向机构包括受伺服电机26驱动运动的导轨27和设置在导轨27上的直线轴承28,直线轴承28与定位底座21连接,平移进料模组带动定位底座21前进至供料机构区域,通过供料吸盘14将原料放置在定位支架22上,此时平移进料模组带动定位底座21后退至初始位置,定位气缸23驱动定位活动板24对原料进行定位。
参见图4、图5和图6,本发明的抓取机构3包括吸盘组件和用于固定吸盘组件的抓取支架31,吸盘组件通过抓取支架31固定在行进机构4上。具体的,吸盘组件包括多个用于抓取原料边框的边框吸盘32、多个用于抓取冲压件的冲压件吸盘33和固定支架34,各吸盘对应固定在固定支架34上,该固定支架34与抓取支架31固连。
参见图4,在本发明中,具有多个抓取机构,该多个抓取机构等间距固定在行进机构4上。
参见图7和图8,行进机构4包括固定杆41、用于带动固定杆41来回移动的平移机构和用于带动固定杆41上下移动的升降机构,抓取机构3固定在固定杆31上,平移机构包括设置在固定杆41背面的平移齿条42、平移齿轮43和带动平移齿轮43转动的平移伺服电机44,平移齿轮43与平移齿条42啮合,在平移齿轮43转动过程中,平移齿条42带动固定杆41来回移动。升降机构包括升降导杆45、升降固定板46、升降固定支架47、升降齿条48、升降主动轮49、升降从动轮50和升降伺服电机51;升降固定板46通过升降固定支架47与固定杆41固定连接,升降导杆45设置在升降固定板46的两端,该升降固定板46可沿升降导杆45上下运动,升降齿条48竖直设置在升降固定板46上,升降伺服电机51驱动升降主动轮50转动,升降主动轮50带动升降从动轮49旋转,升降从动轮49与升降齿条48啮合,在升降从动轮49旋转过程中,升降齿条48带动升降固定板46上下移动,即带动固定杆41上下移动。
- 一种用于微型芯片制作的线性工业机器人
- 一种用于微型芯片制作的冲压上料线性工业机器人