一种代客自主泊车方法及系统
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及自动驾驶、车路协同领域,具体涉及代客泊车技术。
背景技术
AVP,Automated Valet Parking即远程代客泊车系统或自动代客泊车系统,是用户实现自动泊入、泊出车库的技术。使用该系统,全程无需用户监控,完全解放用户,实现召之即来,挥之即去的用户体验,用户无需参与找车位、泊车、寻车过程。
传统的代客泊车流程如下:驾驶员将车辆停泊在特定的区域后下车,经过确认驾驶员联系方式和检查车辆外观和破损情况后,由专门的代驾人员驾驶车辆驶入特定的停车场和停车位,完成一次代客泊车。需要取车时,由代驾人员驾驶车辆由停车位到驾驶员上车区域,确认无误后完成车辆和车钥匙的交接。由此流程可以看出传统的代客泊车需要专门的代客泊车人员,需要付出一定程度的人力成本。此外,传统的代客泊车也无法避免代驾人员犯错的情况,因此多雇用有丰富驾驶经验的司机作为代驾人员,进一步提高了代客泊车的人工成本。即便如此,因为代驾的原因导致车辆发生剐蹭等事故也时有发生。种种因素的限制下,代客泊车难以获得大规模的推广。虽然随着技术的进步,如今传统的代客泊车模式也有APP等新的服务载体,简化了代客泊车的流程,然而其对于人工的依赖从本质上无法改变。
近年来,众多厂商先后推出了各自的自主泊车方案,作为对传统代客泊车的补充。现今的自主泊车方案多通过在车辆上安装自主泊车系统的软硬件来实现自主泊车。如中国专利文献CN201811493030.5公开了一种自动泊车的控制方法及自动泊车系统,基于车位空间判断车位空间是否为合格泊车位,响应于车位空间为合格泊车位,控制车辆进入自动泊车模式,根据车辆与合格泊车位之间的相对位置关系,计算转向请求量和扭矩请求量,基于转向请求量和扭矩请求量确定转向控制量和扭矩控制量,根据转向控制量和扭矩控制量控制车辆泊车入库。然而,该在方案的自动泊车模式下,需要响应于驾驶员踩踏油门踏板,基于油门踏板开度和扭矩请求量确定扭矩控制量,并控制车辆保持在自动泊车模式,无法真正做到全程的代客泊车模式,解决用户最后一公里家庭区域泊车需求。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的是提供一种面向智能网联汽车的代客自主泊车方法,另一个目的是提供一种实现上述方法的代客泊车系统,实现AVP管理系统与用户终端、车端的交互,最终实现远程代客泊车的无人监管,提高用户泊车体验。
本发明所采用的技术方案如下:
第一方面,本发明提供一种面向智能网联汽车的代客自主泊车方法,所述方法包括如下步骤:
步骤(1),所述AVP管理系统接收用户终端发送的AVP请求和指定停车场指令,决定是否接受请求。
步骤(2),所述AVP管理系统接受请求,根据所述指定停车场信息分配可用的停车位,将所述停车位信息变更为占用,并向所述车载单元发送泊车指令。
步骤(3),所述停车场触发单元与AVP管理系统进行交互确认车辆信息,同时,车载单元通过与场端管理系统的数据交互,在确认道闸状态为已完成抬杆后进场。
步骤(4),所述车载单元根据获取的高精度地图数据、障碍物信息、指引信息、实时定位信息实时规划所述AVP车辆从所述泊车触发点到所述停车位置的路径,实时控制所述AVP车辆的行驶轨迹,至车辆泊入停车位;
所述泊车触发点为专门设置的泊车起点位置。
进一步地,所述步骤(1),AVP管理系统决定是否接受请求,包括:
(1.1)若AVP管理系统判断无法启动AVP功能(例如车辆可能不在指定的上下车区域中、车辆定位失败、道路施工暂时停止AVP功能等),则向用户终端返回请求响应,请求响应中包括拒绝请求的信息。
(1.2)若AVP管理系统判断可以启动AVP功能,则向用户终端返回请求响应,请求响应中包括通过请求的信息,同时向车载单元发送AVP泊车指令。
进一步地,所述步骤(3)包括:
(3.1)所述停车场触发单元根据识别信息确认AVP车辆,识别方式包括车牌号识别、无线网络通讯、RFID识别、二维码识别等。
(3.2)若停车场触发单元无法根据识别到的信息确认AVP车辆,则向AVP管理系统发送无法关联停车场的异常信息,AVP管理系统通知后台人工干预协助停车。
(3.3)若停车场触发单元根据识别到的信息确认AVP车辆,则向AVP管理系统发送确认信息,并且抬杆放行AVP车辆,AVP车辆通过与场端管理系统的数据交互,在确认道闸状态为已完成抬杆后进场。
进一步地,所述步骤3.3在向AVP管理系统发送确认信息前,停车场触发单元还需判断前方有无车辆排队进入停车场,包括:
(3.3.1)若停车场触发单元判断前方有车辆排队进入停车场,则向AVP管理系统发出排队指令,AVP管理系统下发排队跟车路径信息到车载单元,车载单元控制AVP车辆开始排队跟车。
(3.3.2)若停车场触发单元判断AVP车辆前方无其他车辆,则向AVP管理系统发送确认信息。
进一步地,所述步骤4包括:
(4.1)车载单元的通讯模块接收来自AVP管理系统推送的停车位编号和带车位编号的高精度道路地图数据。
(4.2)车载单元的规划模块规划从泊车触发点到停车位的路径,车载单元开始进入AVP停车模式。
(4.3)车载单元的导航定位模块根据规划路径,结合高精度道路地图数据向规划模块提供实时定位信息。
(4.4)车载单元的传感模块感知行人和车辆等障碍物信息以及车道标线和转向标识等指引信息,并根据障碍物信息和指引信息生成行为预测信息,向规划模块提供障碍物信息、指引信息和行为预测信息。
(4.5)车载单元的规划模块根据行为预测信息做出决策信息,结合导航定位模块提供的实时定位信息,以及感知模块提供的障碍物信息、指引信息,实时规划路径。
(4.6)车载单元的规划模块将实时路径发送至控制模块,车载单元的控制模块根据收到的实时路径控制AVP车辆行驶至停车位附近,并控制车辆停入停车位。
更进一步地,所述步骤(4.6)中,在控制车辆停入停车位前需判断停车位是否可用,包括:
通过车载单元的传感模块识别指定停车位。
若无法识别出指定的停车位,或者规划模块做出停车位无法使用的决策(例如,停车位被占用或者停车位有障碍物),则车载单元将停车位无法使用的消息发送至AVP管理系统,AVP管理系统通知后台人工干预协助停车。
若识别出指定停车位,且规划模块判断停车位可以使用,则规划局部路径,做出继续前往指定停车位的自动泊车决策,车载单元的导航定位模块计算AVP车辆相对于指定停车位的精确位置和姿态,通过控制模块停入停车位。
进一步地,所述步骤4,在AVP停车模式中,AVP管理系统还实时监测AVP车辆信息,例如车辆位置、车辆轨迹、车辆状态信息、车辆异常信息等,发送给用户终端以便用户可以随时掌握自己的车辆的位置和情况。
进一步地,在车辆泊入停车位时,所述智能地锁系统检测到所述AVP车辆,地锁自动下降。
更进一步地,所述方法还包括步骤(5),取车方法:
(5.1)所述AVP管理系统接收所述用户终端向发送的取车请求,向所述车载单元发送取车指令。
(5.2)所述车载单元规划所述AVP车辆从所述停车位置到所述泊车触发点的路径,根据路径实时控制所述AVP车辆从所述停车位置行驶到所述泊车触发点。
(5.3)所述停车场触发单元向所述AVP管理系统发送车位空出消息,所述AVP管理系统接收所述车位空出消息,将该停车位信息变更为空闲。
(5.4)所述AVP管理系统向所述用户终端发送取车提醒消息。
第二方面,本发明提供一种代客自主泊车系统,实现以上面向智能网联汽车的代客自主泊车方法,系统包括:AVP管理系统、用户终端和车载单元,所述车载单元置于需要泊车的AVP车辆内。
所述AVP管理系统包括第一通讯模块、高精度地图模块、管理模块。所述第一通讯模块用于和用户终端及车载单元进行双向通讯,所述高精度地图模块用于存储所述AVP车辆自动驾驶所需要的高精度地图数据,所述管理模块用于管理停车场信息和AVP车辆信息。
所述用户终端包括第二通讯模块,所述第二通讯模块用于和AVP管理系统进行双向通讯。
所述车载单元包括第三通讯模块、传感模块、导航定位模块、规划模块和控制模块。所述第三通讯模块用于和所述AVP管理系统进行双向通讯,所述传感模块用于获取所述AVP车辆泊车路径上的障碍物信息和指引信息,所述导航定位模块用于为所述车载单元提供实时定位信息,所述规划模块用于所述高精度地图数据、所述障碍物信息、所述指引信息和所述实时定位信息实时规划局部路径,规划所述AVP车辆从泊车触发点到停车位置的路径,所述控制模块用于根据所述规划路径实时控制所述AVP车辆的行驶轨迹。
进一步地,所述系统还包括停车场触发单元。
所述停车场触发单元包括第四通讯模块、识别模块。所述第四通讯模块用于和所述AVP管理系统等进行双向通讯,所述识别模块用于识别所述AVP车辆。
进一步地,所述系统还包括道闸系统和智能地锁系统,所述道闸系统用于放行已经通过识别的所述AVP车辆,所述智能地锁系统用于自动检测停车位上是否有车辆停放,支持远程操控与自动复位。
进一步地,所述高精度地图数据包括高精度道路地图数据和高精度停车场地图数据,并且车位编号与高精地图车位编号绑定,所述规划路径包括从泊车触发点到空车位的路径。
进一步地,所述停车场信息包括停车位占用或空闲信息,所述AVP车辆信息包括车辆位置、车辆轨迹、车辆状态信息、车辆异常信息。
所述控制模块还用于根据所述控制模块的决策信息实时控制所述AVP车辆的行驶轨迹。
本发明的有益效果是:
本发明通过设置专门泊车触发点区域作为起点位置,用户只需将车辆驾驶到起点位置后下车,AVP管理系统自动完成从起点位置到停车位置的泊车过程,解决了现有AVP方案无法提供全自动的代客泊车流程的问题,从而提供了一种自动化程度高的泊车系统和方法,提高用户泊车体验。
本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
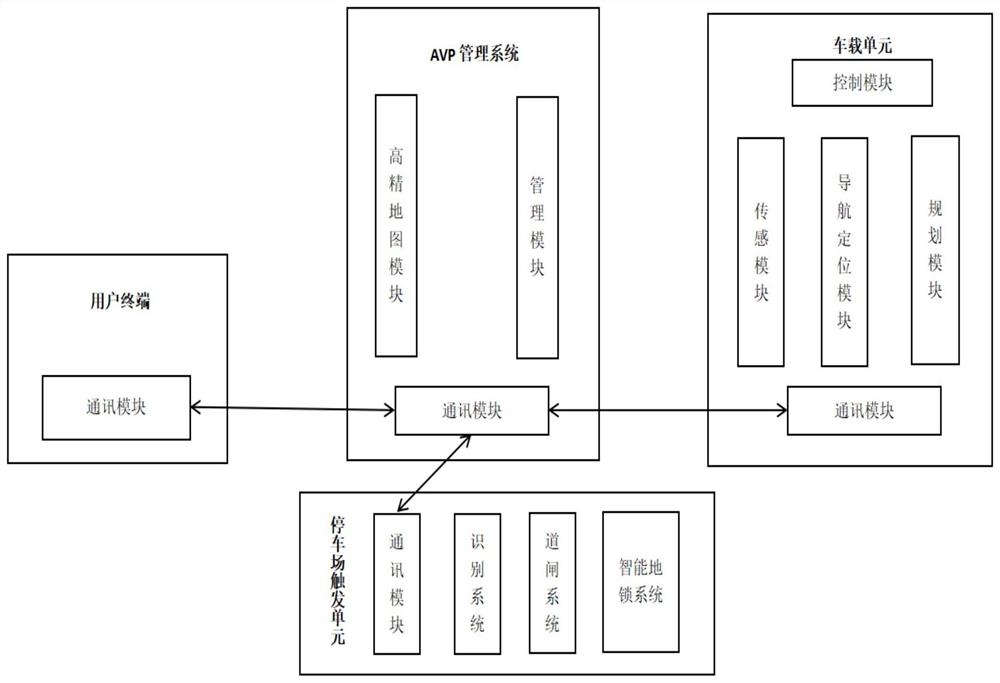
图1是本发明中面向智能网联汽车的代客自主泊车系统的一个实施例的结构示意图。
具体实施方式
参见图1,代客自主泊车系统包括:AVP管理系统、用户终端、车载单元和停车场触发单元。
所述AVP管理系统包括第一通讯模块、高精度地图模块、管理模块。
所述第一通讯模块用于和用户终端及车载单元进行双向通讯。
所述高精度地图模块用于存储所述AVP车辆自动驾驶所需要的高精度地图数据。
所述管理模块用于管理停车场信息和AVP车辆信息。
所述用户终端包括第二通讯模块,所述第二通讯模块用于和AVP管理系统进行双向通讯。
所述车载单元配置包括第三通讯模块、传感模块、导航定位模块、规划模块和控制模块。
所述第三通讯模块用于和所述AVP管理系统进行双向通讯。
所述传感模块用于获取所述AVP车辆泊车路径上的障碍物信息和指引信息。
所述导航定位模块用于为所述车载单元提供实时定位信息。
所述规划模块用于根据所述高精度地图数据、所述障碍物信息、所述指引信息和所述实时定位信息实时规划局部路径,规划所述AVP车辆从泊车触发点到停车位置的路径。
所述控制模块用于根据所述规划路径实时控制所述AVP车辆的行驶轨迹。
所述停车场触发单元包括第四通讯模块、识别模块。
所述第四通讯模块用于和所述AVP管理系统进行双向通讯。
所述识别模块用于识别所述AVP车辆。
还包括道闸系统和智能地锁系统;所述道闸系统用于放行已经通过识别的所述AVP车辆。所述智能地锁系统用于自动检测停车位上是否有车辆停放,支持远程操控与自动复位。
下面上述系统,对用户泊车和取车的方法进行举例说明:
(1)用户驾驶需要泊车的AVP车辆进入指定的上下车区域(即专门设置的泊车触发点),驾驶员下车,用户打开用户终端,在终端内确认需要AVP。
(2)用户终端的第二通讯模块发送AVP请求至AVP管理系统的第一通讯模块,AVP管理系统接收来自用户终端的AVP请求,决定是否接受请求。
①若AVP管理系统判断无法启动AVP功能,则向用户终端返回请求响应,请求响应中包括拒绝请求的信息。其中无法启动AVP功能的情形包括,例如车辆可能不在指定的上下车区域中、车辆定位失败、道路施工暂时停止AVP功能等。
②若AVP管理系统判断可以启动AVP功能,则向用户终端返回请求响应,请求响应中包括通过请求的信息,同时通知停车场触发单元,停车场触发单元根据识别信息确认AVP车辆,识别方式包括车牌号识别、无线网络通讯、RFID识别、二维码识别等。
③若停车场触发单元无法根据识别到的信息确认AVP车辆,则向AVP管理系统发送无法关联停车场的异常信息,当AVP管理系统收到无法关联M停车场的异常信息,则通知后台人工干预协助停车。
④若停车场触发单元判断前方还有车辆排队进入停车场,则向AVP管理系统发出排队指令,AVP管理系统下发排队跟车路径信息到车载单元,当车载单元收到排队跟车路径信息时,控制AVP车辆开始排队跟车;
⑤若停车场触发单元根据识别到的信息确认AVP车辆前方无其他车辆,可以直接进入停车场停车,则向AVP管理系统发送确认信息,并且抬杆放行AVP车辆;AVP车辆通过与场端管理系统的数据交互,在确认道闸状态为已完成抬杆后进场。
(3)同时,当AVP管理系统收到确认信息时,根据停车场信息(即停车位占用或空闲信息)分配停车位,假设分配的停车位为N,则将N停车位信息变更为占用。
(4)AVP管理系统向AVP车辆的车载单元发送路径和高精度道路地图数据,车载单元的通讯模块接收来自AVP管理系统的路径和高精度道路地图数据。
①车载单元的规划模块规划从泊车触发点到停车位的路径,车载单元开始进入AVP停车模式;在该模式中,AVP管理系统还实时监测AVP车辆信息,例如车辆位置、车辆轨迹、车辆状态信息、车辆异常信息等,发送给用户终端以便用户可以随时掌握自己的车辆的位置和情况。
②车载单元的导航定位模块根据规划路径,结合高精度道路地图数据向规划模块提供实时定位信息。
③车载单元的传感模块感知行人和车辆等障碍物信息以及车道标线和转向标识等指引信息,并根据障碍物信息和指引信息生成行为预测信息,向规划模块提供障碍物信息、指引信息和行为预测信息。
④车载单元的规划模块根据行为预测信息做出决策信息,结合导航定位模块提供的实时定位信息,以及感知模块提供的障碍物信息、指引信息,实时规划路径。
⑤车载单元的规划模块将实时路径发送至控制模块,车载单元的控制模块根据收到的实时路径控制AVP车辆行驶至停车位附近。同时规划模块做出N 停车位是否可以使用的决策,车载单元的传感模块对指定车位进行识别。
若传感模块无法识别出指定的N停车位,或者规划模块做出N 停车位无法使用的决策(例如,停车位被占用或者停车位有障碍物),则车载单元将N停车位无法使用的消息发送至AVP管理系统,当AVP管理系统收到N停车位无法使用的消息时,AVP管理系统通知后台人工干预协助停车。
若传感模块识别出指定的N停车位,且车载单元的规划模块判断N停车位可以使用,则规划局部路径,做出继续前往N停车位的决策,车载单元的导航定位模块计算AVP车辆相对于N停车位的精确位置和姿态,通过控制模块停入N停车位。
(5)车载单元结束停车模式。
(6)后续用户需要取车时,通过用户终端向AVP管理系统发送取车请求,AVP管理系统向车载单元发送取车指令,车载单元规划AVP车辆从N停车位到泊车触发点的路径,进入取车模式。
①车载单元的导航定位模块根据规划路径信息,结合高精度停车场地图数据向规划模块提供实时定位信息,车载单元的传感模块感知行人和车辆等障碍物信息以及车道标线和转向标识等指引信息,并根据障碍物信息和指引信息生成行为预测信息,向规划模块提供障碍物信息、指引信息和行为预测信息。
②车载单元的规划模块根据行为预测信息做出决策信息,结合导航定位模块提供的实时定位信息,以及传感模块提供的障碍物信息、指引信息,在规划的路径的基础上实时规划局部路径。
③车载单元的规划模块将实时局部路径发送至控制模块,车载单元的控制模块根据收到的实时局部路径控制AVP车辆从N停车位行驶至停车场出口。车载单元的规划模块向AVP管理系统发出已离开N停车位消息,AVP管理系统变更N停车位信息为空闲,智能地锁系统自动将地锁升起。
④在停车场出口处,停车场触发单元根据识别信息确认AVP车辆,停车场触发单元将识别信息发送至AVP管理系统,AVP管理系统接收识别消息,确认AVP车辆离开停车场,停车场触发单元打开停车场栏杆,AVP车辆离开停车场。车载单元的导航定位模块根据实时定位信息确认车辆到达泊车触发点,AVP管理系统向用户终端发送取车提醒消息,用户完成取车。
以上结合附图详细描述了本发明实施例的可选实施方式,但是,本发明实施例并不限于上述实施方式中的具体细节,在本发明实施例的技术构思范围内,可以对本发明实施例的技术方案进行多种简单变型,这些简单变型均属于本发明实施例的保护范围。
- 一种自主代客泊车方法及代客泊车系统
- 代客泊车方法和代客泊车系统