急救机器人系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人领域,尤其涉及一种急救机器人系统。
背景技术
5G(第五代移动通信技术)技术的出现,改变了人们的生活,5G网络的主要优势在于,数据传输速率远远高于以前的蜂窝网络,最高可达10Gbit/s(一种数据传送单位),比当前的有线互联网要快,比先前的4GLTE(一种长期演进技术)蜂窝网络快100倍。另一个优点是较低的网络延迟(更快的响应时间),低于1毫秒,而4G为30-70毫秒。由于数据传输更快,5G网络将成为一般性的家庭和办公网络。5G网络正朝着网络多元化、宽带化、综合化、智能化的方向发展。随着各种智能终端的普及,面向2020年及以后,移动数据流量将呈现爆炸式增长。
5G无线通讯模块可以做成各种各样的通信设备,基于其高速率、低延时的特点,可用于AR/VR(虚拟现实/AR增强现实)、实时远程视频、无人机、机器人、AGV(AutomatedGuided Vehicle,自动导引车)等领域。使用有嵌入5G无线模块的设备就具有了高强的数据传输能力,可以实时的和其他通讯设备进行互动,双向传输视频数据,使室内监控、和智慧医院远程通话成为现实。
我国老龄化问题越来越严重,很多老人独自居住,无人看护老人,在紧急时刻时无法进行急救。
发明内容
本发明要解决的技术问题是为了克服现有技术中老人在紧急时刻时无法进行急救的缺陷,提供一种急救机器人系统。
本发明是通过下述技术方案来解决上述技术问题:
本发明提供一种急救机器人系统,所述急救机器人系统包括机器人本体、处理器、视频采集模块、机械手、扫描器、急救服、若干个射频标签;
所述处理器、所述视频采集模块、所述机械手设置于所述机器人本体上;
所述扫描器设置于所述机械手上;
若干个所述射频标签分别设置于所述急救服上的对应的目标位置;
所述处理器与所述视频采集模块、所述机械手、所述扫描器及所述射频标签电连接;
所述处理器接收急救指令并发送第一信号至所述机械手,所述机械手带动所述扫描器扫描所述射频标签,判断所述射频标签与预设标签是否相同,若是,则所述扫描器发送第二信号至所述处理器,所述处理器接收第二信号并发送第三信号至所述机械手,触发所述机械手按压所述射频标签的对应的所述目标位置。
较佳地,所述急救机器人系统还包括储物柜;
所述储物柜用于存放呼吸机和/或除颤器,将所述呼吸机和/或除颤器存放至储物柜中,和/或所述机器人根据取用指令从所述储物柜中取用所述呼吸机和/或所述除颤器。
较佳地,所述急救机器人系统还包括人体检测模块、通讯模块;
所述通讯模块设置于所述机器人本体上;
所述人体检测模块与所述通讯模块通讯连接;
所述人体检测模块采集被看护人的健康指标数据,并将所述健康指标数据通过所述通讯模块传输至所述处理器中。
较佳地,所述人体检测模块为手环。
较佳地,所述手环包括生物标记物传感器和检测心电图芯片;
所述生物标记物传感器,用于测量所述被看护人的人体汗液中的生物标记物;
所述检测心电图芯片,用于监测所述被看护人的人体瞬时心电图和持续24小时的动态心电图。
较佳地,所述急救机器人系统还包括显示屏;
所述显示屏用于与智慧医院和/或被看护人的亲属进行视频通话。
较佳地,所述机械手包括弹簧、吸盘及剪刀;
所述弹簧设置于所述机械手的手掌内;
所述吸盘设置于所述机械手的手掌的手指端部;
所述剪刀设置于所述机械手的手掌的手指端部。
较佳地,所述急救机器人还包括定位装置;
所述定位装置设置于所述急救服上。
较佳地,所述急救机器人系统还包括滑轮;
所述滑轮设置于所述机器人本体上的底座的下方。
较佳地,所述急救机器人系统还包括座椅;
所述座椅设置于所述机器人本体的下身位置;
和/或,所述急救机器人系统还包括语音识别系统;
所述语音识别系统与所述处理器电连接;
所述语音识别系统用于识别被看护人的语音,并根据识别的结果生成急救指令,将所述急救指令发送至所述处理器中。
本发明的积极进步效果在于:
本发明公开了一种急救机器人系统,通过在机器人本体上扫描器,通过扫描器扫描急救服上的射频标签,以获取目标射频标签,从而找到目标位置,进而触发所述机械手按压所述射频标签的对应的所述目标位置,实现了机器人能给被看护人实施急救,解决了老人在紧急时刻无法进行急救的问题。
附图说明
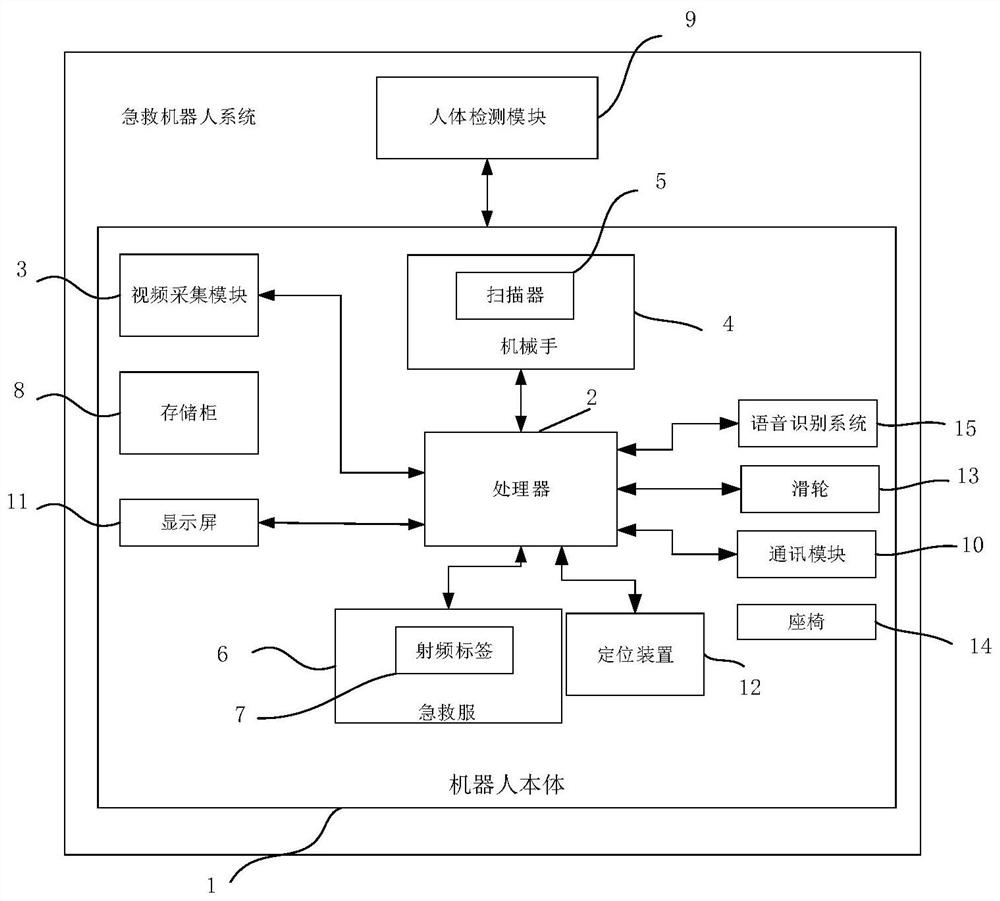
图1为本发明一较佳实施例的急救护理机器人系统的结构示意图。
具体实施方式
下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
实施例1
如图1所示,本实施例公开了一种急救机器人系统,该智能护理机器人系统包括机器人本体1、处理器2、视频采集模块3、机械手4、扫描器5、急救服6、若干个射频标签7;
处理器2、视频采集模块3、机械手4设置于机器人本体1上;扫描器5设置于机械手4上;若干个射频标签7分别设置于急救服6上的对应的目标位置;处理器2与视频采集模块3、机械手4、扫描器5及射频标签7电连接;处理器2接收急救指令并发送第一信号至机械手4,机械手4带动扫描器5扫描射频标签7,判断射频标签7与预设标签是否相同,若是,则扫描器5发送第二信号至处理器2,处理器2接收第二信号并发送第三信号至机械手4,触发机械手4按压射频标签7的对应的目标位置。在一具体的实施例中,急救服穿戴于被看护人的身上。该机器人系统设有三个射频标签,其中两个标签分别设置在急救服对应的被看护人的两处胸部位置,胸部位置主要是用于除颤仪除颤的位置,该位置在被看护人胸口左上方和右下方,分别为胸骨右缘2~3肋间和左腋前线内第5肋间;一个标签设置在急救服对应的被看护人的心脏位置,该位置用于急救时按压的位置。具体地,急救服可以是按主人身材定制的紧身薄内衣。急救时内衣用于心脏按压和除颤的定位,一旦定位到具体位置,主处理机会发信息到机械手,把内衣撕掉或剪掉扔弃。
在一优选的可实施方式中,急救机器人系统还包括储物柜8;储物柜8用于存放呼吸机和/或除颤器,机器人根据存放指令从储物柜中存放呼吸机和/或除颤器。
在一优选的可实施方式中,急救机器人系统还包括人体检测模块9、通讯模块10;通讯模块10设置于机器人本体1上;人体检测模块9与通讯模块10通讯连接;人体检测模块9采集被看护人的健康指标数据,并将健康指标数据通过通讯模块10传输至处理器2中。在具体的实施方式中,人体检测模块9为手环,通讯模块为5G通讯模块,该手环包括生物标记物传感器和检测心电图芯片;生物标记物传感器,用于测量被护理人的人体汗液中的生物标记物,例如,生物标记物可以是检测乳酸、电解质、钙和重金属离子等的含量;生物标记物传感器可以将检测的数据通过蓝牙、NFC(Near Field Communication,近距离无线通讯技术)或RFID(射频识别)传输至机器人的处理器中,从而实现对看护人的健康数据进行实时分析和跟踪。检测心电图芯片,用于监测被护理人的人体瞬时心电图和持续24小时的动态心电图。手环采集的数据通过蓝牙、NFC或RFID传输至机器人的处理器中。智能手环可以定时检测被看护人的心率、步数和消耗的卡路里数的数据,根据心率、步数和消耗的卡路里数的数据从而确定被看护人的身体状况,进而判断被看护人是否健康。例如,当智能手环检测被看护人的心率,并将心率数据发送处理器,处理器根据心率数据判断被看护人的睡眠状态,进而判断心率是否正常。
在一优选的可实施方式中,急救机器人系统还包括显示屏11;显示屏11用于与智慧医院和/或被看护人的亲属进行视频通话。
在一优选的可实施方式中,机械手4包括弹簧、吸盘及剪刀;弹簧设置于机械手4的手掌内;吸盘设置于机械手4的手掌的手指端部,吸盘外有皮制掌面,吸盘和弹簧连接,弹簧通电后,处理器发送控制电信号至机械手中,使得机械手在心肺复苏时,按照主机指令对被看护人进行按压,例如,以100次/分钟的频率对被看护人进行按压;剪刀设置于机械手4的手掌的手指端部。在本实施例中,通过在机械手上设置弹簧,从而实现在急救时对被看护人进行目标位置的按压。在本实施例中,将剪刀设置于机械手的手掌的手指端部可以实现在急救时将杯看护人的衣服剪开便于实施急救操作。
在一优选的可实施方式中,急救机器人还包括定位装置12;定位装置12设置于急救服6上。在具体的实施中,定位装置可以为蓝牙芯片,通过蓝牙芯片实现对被看护人的位置信息的传输。同时,该定位信息可以检测到被卡看护人的三维的位置,通过三维的位置判断被看护人是否处于平躺的位置,并结合手环检测的健康指标数据,进一步判断被看护人是否需要急救。
在一优选的可实施方式中,急救机器人系统还包括滑轮13;滑轮13设置于机器人本体1上的底座的下方。在本实施例中,滑轮与处理器电连接,通过处理器来控制滑轮的运行,从使得急救机器人系统可以移动,以便可以根据被看护人的位置,随时到达被看护人的身边。
在一优选的可实施方式中,急救机器人系统还包括座椅14;座椅14设置于机器人本体1的下身位置。被看护人在座椅14上坐下后,被看护人的头部位置处于靠近机器人头部固定位置的区域,视频采集模块扫描区域,从而获取喂药位置。
在一优选的可实施方式中,急救机器人系统还包括语音识别系统15;语音识别系统15与所述处理器2电连接,语音识别系统15用于识别被看护人的语音,并根据识别的结果生成急救指令,将所述急救指令发送至所述处理器2中,以便触发机器人进入急救状态,从而可以对被看护人进行心肺复苏和除颤处理。
本实施例中公开了一种急救机器人系统,通过在机器人本体上扫描器,通过扫描器扫描急救服上的射频标签,以获取目标射频标签,从而找到目标位置,进而触发机械手按压射频标签的对应的目标位置,实现了机器人能给被看护人实施急救,解决了老人在紧急时刻无法进行急救的问题。另外,智能护理机器人系统还包括了座椅、显示屏、人体检测模块及滑轮使得机器人更好地对被看护人进行急救。
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
- 适用于水上急救机器人浮力约束装置、急救机器人及工作方法
- 医疗急救机器人、工作方法及系统