一种焊缝碾压机
文献发布时间:2023-06-19 11:21:00
技术领域
本发明属于焊缝处理技术领域,具体为一种焊缝碾压机。
背景技术
制管工艺中,不锈钢钢板通过卷圆和纵缝焊后形成筒体,针对不锈钢钢板通过卷圆和纵缝焊后所带来的残余应力和焊缝处外观凹凸不平等问题,需要对筒体焊缝位置进行碾压,使筒体焊缝位置的应力得到释放、焊缝处外观得到了修正、内部组织和缺陷得到了调整。然而传统的打磨处理焊缝的方式,效率较低,产品报废率较高。
发明内容
针对现有技术存在的上述问题,本发明的目的是提供一种焊缝碾压机,碾压前后筒体残余应力下降明显,焊缝处理效率高,产品报废率下降;所述碾压机装置简单、体积紧凑、功能集成度高、操作简便、出力稳定,使用气液增压缸,动作速度较液压快,既保证了碾压轮碾压焊缝时的压力,也不用担心油污污染。
为了实现上述目的,本发明所采用的技术方案是:
一种焊缝碾压机,包括机台以及安装在机台上的定位支撑机构、芯棒和碾压机构,芯棒穿过定位支撑机构,碾压机构位于芯棒的上方,定位支撑机构和碾压机构可移动地安装在机台上,定位支撑机构的移动方向平行于芯棒长度方向,碾压机构在相互垂直的第一方向和第二方向可移动,所述第一方向平行于芯棒长度方向,待加工的筒体套入芯棒后支撑在芯棒上且筒体的一端面抵靠在定位支撑机构上,碾压机构在所述第二方向移动至压紧芯棒上筒体的焊缝,同时在第一方向上移动碾压焊缝。
作为上述技术方案的进一步改进:
优选的,所述焊缝碾压机还包括安装在机台上的挂钩机构,芯棒的一端固定安装在机台上、另一端可拆卸地连接挂钩机构。
优选的,所述焊缝碾压机还包括丝杆装置,丝杆装置连接并驱动定位支撑机构移动。
更优选的,丝杆装置包括第一滚珠丝杆和螺母块,第一滚珠丝杆的两端可转动地安装在机台上,螺母块螺接在第一滚珠丝杆上,定位支撑机构和螺母块固定连接。
丝杆装置还包括两个罩在第一滚珠丝杆外的丝杆护罩,两个弹性的丝杆护罩分别位于定位支撑机构的两侧。
优选的,定位支撑机构包括固定座、第一气缸和托举模具块,固定座和所述螺母块固定连接,第一气缸安装在固定座上,第一气缸连接并驱动托举模具块在垂直于芯棒的长度方向上移动,托举模具块上升移动至接触并托举套在芯棒上的筒体的底部,或下降移动至脱离所述筒体。
定位支撑机构还包括固定滑板,托举模具块安装在固定滑板上,固定滑板上设有多个滑块,固定座上设有垂直于芯棒长度方向上的多条滑轨,滑块沿着滑轨移动,第一气缸连接并驱动固定滑板。
优选的,碾压机构包括油缸座、气液增压缸、第二伺服电机、碾压组件,气液增压缸和碾压组件安装在油缸座上,第二伺服电机连接并驱动油缸座在所述第一方向上运动,气液增压缸连接并驱动碾压组件在所述第二方向上运动,碾压组件包括碾压轮,碾压组件下移至碾压轮压紧焊缝,或者碾压组件上移至撤销对焊缝的压力。
优选的,所示机台上还设有至少一条导轨,油缸座上还设有多个滑块二,滑块二沿着导轨可滑动地设置。
优选的,所述焊缝碾压机还包括控制系统和用于限定定位支撑机构在芯棒上移动范围的限位组件,限位组件包括检测块和两个接近开关,接近开关和所述控制系统电连接,两个接近开关间隔布置在所述机台上,检测块安装在定位支撑机构上,当定位支撑机构移动至检测块和接近开关的距离不大于设定值时,接近开关接收到检测块的位置信息,并将所述位置信息发送给所述控制系统。
本发明的有益效果是:碾压前后筒体残余应力下降明显,焊缝处理效率高,产品报废率下降;所述碾压机装置简单、体积紧凑、功能集成度高、操作简便、出力稳定,使用气液增压缸,动作速度较液压快,既保证了碾压轮碾压焊缝时的压力,也不用担心油污污染;挂钩机构实现对芯棒支撑的同时不干涉筒体的套入和取出;定位支撑机构对不同长度的筒体进行定位和支撑,使所述碾压机适用不同长度的筒体加工,同时使筒体更轻松便捷快速地套入和取出,丝杆护罩实现对第一滚珠丝杆和螺母块的保护同时不干涉定位支撑机构的移动。
附图说明
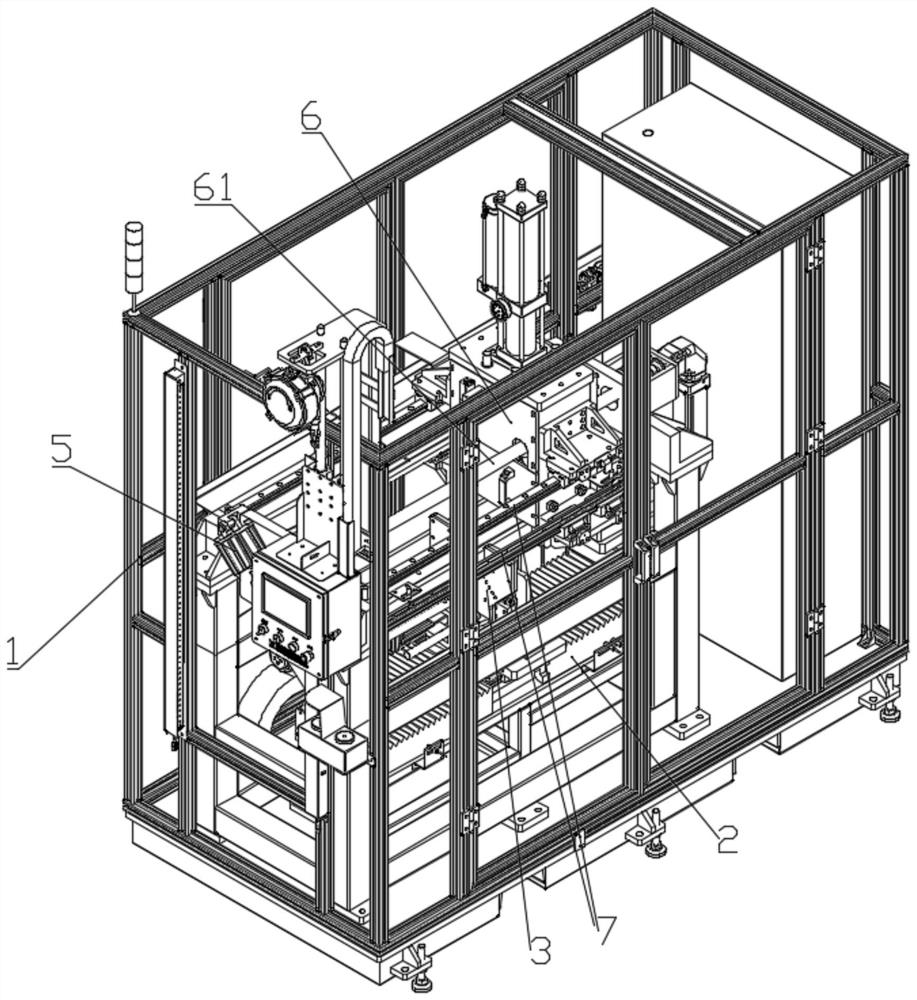
图1为本发明一个实施例的结构示意图;
图2为本发明一个实施例的主视结构示意图;
图3为本发明一个实施例的侧视结构示意图;
图4为本发明一个实施例的丝杆装置的无托举模具块的结构示意图;
图5为本发明一个实施例的丝杆装置另一视角结构示意图;
图6为本发明一个实施例的定位支撑机构的无支撑板的结构示意图;
图7为本发明一个实施例的定位支撑机构的无支撑板的另一视角结构示意图;
图8为本发明一个实施例的碾压机构的无第二伺服电机和第二滚珠丝杆的结构示意图;
图9为本发明一个实施例的碾压机构的无第二伺服电机和第二滚珠丝杆的另一视角结构示意图。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
一种焊缝碾压机,如图1~9所示,包括机台1以及安装在机台1上的芯棒4、挂钩机构5、丝杆装置2、定位支撑机构3、碾压机构6、限位组件、控制系统和多条导轨7。
芯棒4的一端固定安装在机台1上、另一端可拆卸地连接挂钩机构5。芯棒4穿过定位支撑机构3,即定位支撑机构3位于芯棒4的两端之间。待加工的筒体套在芯棒4的外部并支撑在芯棒4上,芯棒4的外径小于筒体的内径。芯棒4平行于水平面。
挂钩机构5包括挂钩51和第二气缸。第二气缸安装在机台1上,挂钩51的中部铰接在机台1上,挂钩51的一端连接第二气缸的气缸轴。第二气缸驱动挂钩51时,挂钩51绕其铰接处转动,挂钩51的另一端移动至钩挂住芯棒4的一端或脱离对芯棒4的钩挂,挂钩51钩挂住芯棒4实现对芯棒4的辅助支撑。
丝杆装置2连接并驱动定位支撑机构3沿着直线方向移动。具体的,定位支撑机构3的移动方向平行于芯棒4的长度方向。丝杆装置2位于芯棒4的下方。丝杆装置2包括减速机21、第一伺服电机22、伺服座23、联轴器24、第一滚珠丝杆、螺母块27、两个丝杆护罩支架26、两个丝杆支座和两个丝杆护罩25。
两个丝杆支座安装在机台1上,第一滚珠丝杆的两端通过轴承分别可转动地安装在两个丝杆支座上,第一滚珠丝杆和芯棒4平行间隔布置,螺母块27螺接在第一滚珠丝杆上,定位支撑机构3和螺母块27固定连接。第一伺服电机22、减速机21、联轴器24、第一滚珠丝杆的一端依次连接并传递驱动,第一伺服电机22和减速机21安装在伺服座23上。
两个丝杆护罩25罩在第一滚珠丝杆外,定位支撑机构3位于两个丝杆护罩25之间。具体的,两个丝杆护罩支架26分别固定安装在第一滚珠丝杆两端的机台1上,两个丝杆护罩支架26分别用于连接两个丝杆护罩25。丝杆护罩25的一端连接丝杆护罩支架26、另一端连接定位支撑机构3。丝杆护罩25为可伸缩的弹性材质,当定位支撑机构3沿着第一滚珠丝杆的长度方向移动时,一个丝杆护罩25被压缩、另一个丝杆护罩25被拉伸,如此可以实现保护第一滚珠丝杆和螺母块27免受外部杂质等影响外,还可不阻碍定位支撑机构3的移动。
定位支撑机构3包括固定座31、支架板23、固定滑板36、托举模具块33、第一气缸32、浮动接头块37、浮动接头38、支撑板39、多条滑轨34和多个滑块35。
固定座31和所述螺母块27固定连接,支架板23一端固定连接固定座31、另一端向上悬伸。支架板23垂直于第一滚珠丝杆。支架板23上设有多条平行间隔布置的滑轨34,较佳的,设有两条滑轨34,滑轨34的长度方向垂直于第一滚珠丝杆或芯棒4长度方向。
固定滑板36上设有多个滑块35,多个滑块35分别滑设在多条滑轨34上。较佳的,设有两个滑块35。托举模具块33和固定滑板36固定连接。托举模具块33包括两个平行布置的支撑杆,所述支撑杆的长度方向平行于第一滚珠丝杆的长度方向。
浮动接头块37和浮动接头38安装在固定滑板36上,第一气缸32安装在固定座31上,第一气缸32的气缸轴连接浮动接头38。
支撑板39固定安装在固定座31或者支架板23上。
基于上述结构,第一气缸32驱动固定滑板36上下移动,或说固定滑板36沿着滑轨34移动。固定滑板36带动托举模具块33上下移动。
碾压机构6位于芯棒4的上方,碾压机构6可移动地安装在机台1上,碾压机构6在相互垂直的第一方向和第二方向可移动,所述第一方向平行于芯棒4长度方向,所述第二方向垂直于水平面。
碾压机构6包括第二伺服电机、第二滚珠丝杆61、油缸座64和安装在油缸座64上的气液增压缸63、碾压组件、连接座62、把手65、多个上衔接座67、下衔接座68、多个滑块二66。
油缸座64为具有内部空腔、无底面的结构。油缸座64的两个相对的侧面上均设有滑块二66,较佳的,每个侧面上设有两个滑块二66。设有滑块二66的每个侧面上设有一个上衔接座67和一个下衔接座68。上衔接座67的底部安装一组滑块二66,下衔接座68的顶部安装一组滑块二66,上衔接座67上的滑块二66位于下衔接座68上的滑块二66的正上方,即每个侧面上的两个滑块二66相向布置。每组滑块二66包括两个滑块二66。
所示机台1上还设有至少一条导轨7,较佳的,设有四条导轨7,每组滑块二66沿着一条导轨7可滑动地设置。上述导轨7和滑块二66的设置使碾压机构6能稳定地沿着导轨7滑动。
气液增压缸63安装在油缸座64的顶部,气液增压缸63的驱动轴连接碾压组件,气液增压缸63位于碾压组件的上方。气液增压缸63的驱动轴位于设有滑块二66的两个侧面之间,即气液增压缸63的驱动轴位于油缸座64的内部空腔中。
碾压组件包括碾压轴692、导向轴支座、连接板、两个导向轴和至少一个碾压轮691。导向轴支座固定安装在油缸座64内,两个导向轴平行间隔布置,导向轴的上端固定连接导向轴支座、下端向下悬伸。连接板和碾压轴692位于导向轴支座的下方,碾压轴692间隔位于连接板的下方,碾压轴692和连接板固定连接。碾压轮691可转动地安装在碾压轴692的中部。
第二滚珠丝杆61可转动地安装在机台1上。第二滚珠丝杆61的长度方向平行于芯棒4的长度方向,连接座62螺接在第二滚珠丝杆61上。第二伺服电机连接并驱动第二滚珠丝杆61转动,第二滚珠丝杆61带动连接座62和油缸座64沿着第二滚珠丝杆61移动。
基于上述结构,气液增压缸63的气缸轴连接并驱动连接板上下移动,连接板带动碾压轴692同步运动,碾压轴692带动碾压轮691上下移动。连接板上设有两个导向孔,两个导向轴分别穿过导向孔,连接板沿着导向轴移动,即导向轴起到导向的作用。
把手65设有一个或多个,把手65设在油缸座64的外表面,把手65便于操作人员抓取和施力。
基于上述结构,第二伺服电机连接并驱动碾压组件在所述第一方向上运动,气液增压缸63连接并驱动碾压组件在所述第二方向上运动。
控制系统包括控制器、控制箱91和电控箱92。控制箱91设置在机台1的设有挂钩机构5的一侧,电控箱92设置在机台1的远离挂钩机构5的一侧。控制器设置在电控箱92内,控制箱91和控制器电连接。控制箱91包括显示界面和用于输入操作指令的操作按钮等。控制箱91用于供操作人员查看操作数据和输入操作指令。
限位组件用于限定定位支撑机构3在芯棒4上的移动范围,限位组件包括检测块81、两个检测支架82和两个接近开关,接近开关和所述控制器电连接,两个接近开关间隔布置在所述机台1上。具体的,两个接近开关分别安装在两个检测支架82上,检测块81安装在定位支撑机构3上,当定位支撑机构3移动至检测块81和接近开关的距离不大于设定值时,接近开关接收到检测块81的位置信息,并将所述位置信息发送给所述控制器,以提醒工作人员。
本发明的工作过程为:第二气缸带动挂钩51转动,使挂钩51脱离对芯棒4的钩挂,人工把待加工的筒体从脱离挂钩51的芯棒4一端套入芯棒4,使筒体远离操作人员的一端面抵靠在定位支撑机构3的支撑板39上,且焊缝位于最顶部,此时筒体支撑在芯棒4上。启动第二气缸,第二气缸带动挂钩51转动至钩挂住芯棒4。
然后,第二伺服电机驱动油缸座64沿着所述导轨7移动至碾压轮691接触焊缝或位于焊缝正上方。接着启动气液增压缸63,气液增压缸63驱动碾压轮691下移至压紧焊缝,同时第二伺服电机驱动油缸座64移动,使碾压轮691沿着焊缝滚动,实现对焊缝的碾压。
碾压完毕后,气液增压缸63驱动碾压轮691上移至解除对焊缝的压力,同时第二伺服电机驱动油缸座64移动至离开筒体,以不干涉筒体的后续动作。接着定位支撑机构3的第一气缸32驱动固定滑板36带动托举模具块33上升,托举模具块33上升移动至接触并托举套在芯棒4上的筒体的底部。
最后,再启动第二气缸,第二气缸驱动挂钩51转动至解除对芯棒4的钩挂。人工取出筒体,第一气缸32驱动固定滑板36带动托举模具块33下移至托举模具块33不干涉筒体的套入,再套入下一个待加工的筒体,重复上述步骤。
上述过程中,托举模具块33对筒体托举,可以更轻松地取出筒体。
若筒体的长度发生改变,则启动丝杆装置2的第一伺服电机22,第一伺服电机22带动第一滚珠丝杆转动,第一滚珠丝杆通过螺母块27带动定位支撑机构3沿着第一滚珠丝杆的长度方向移动至合适位置,定位支撑机构3适应新的筒体的抵靠和托举。在定位支撑机构3沿着第一滚珠丝杆长度方向移动的过程中,定位支撑机构3两边的丝杆护罩25分别压缩和拉伸,使两个丝杆护罩25保持对第一滚珠丝杆的防护,同时不妨碍定位支撑机构3的移动。
最后有必要在此说明的是:以上实施例只用于对本发明的技术方案作进一步详细地说明,不能理解为对本发明保护范围的限制,本领域的技术人员根据本发明的上述内容作出的一些非本质的改进和调整均属于本发明的保护范围。
- 一种铝镁合金采用油压机制坯碾环机成型工艺
- 一种焊缝碾压机