卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于自动控制技术领域,具体涉及卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法。
背景技术
卷到卷(Roll-to-Roll,R2R)制造技术用来加工连续的、柔性的带状基材,广泛应用于造纸、印刷、纺织、轧钢等传统领域,以及RFID标签、太阳能电池、柔性显示器等新兴领域。柔性基板的张力和横向偏移控制是卷到卷制造中的关键问题,目前卷到卷系统的控制结构以分散控制为主,张力和横向偏移均为独立建模和控制。卷到卷系统中的耦合问题集中在研究张力和速度的耦合与解耦控制,而实际上基板横向偏移与张力、速度也密切相关,三者存在耦合关系。在分散控制时通常将耦合问题作为外部扰动来处理,只能一定程度削弱耦合作用,效果并不理想。针对卷到卷系统中张力、速度和横向偏移耦合严重的区域,需要对多变量系统设计解耦控制律,实现输入输出解耦控制。
发明内容
本发明要解决的技术问题是:提供卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法,用于解耦卷到卷系统的张力、速度和横向偏移耦合问题。
本发明为解决上述技术问题所采取的技术方案为:卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法,包括以下步骤:
S1:根据对基板的纵向和横向动力学分析,分别建立卷到卷系统的基板张力模型、辊轴速度模型和基板横向偏移模型;
S2:根据耦合关系选择状态变量、输入变量和输出变量,将步骤S1得到的基板张力模型、辊轴速度模型和基板横向偏移模型整合成一个多变量非线性耦合模型;在系统稳态工作点附近将多变量非线性耦合模型线性化,得到卷到卷系统的基于状态空间表达的多变量线性耦合模型;
S3:将步骤S2得到的多变量线性耦合模型的解耦问题转化为将传递函数矩阵G(s)设计为非奇异对角矩阵的问题;采用状态反馈解耦理论和极点配置方法设计解耦控制器,实现卷到卷系统输入输出解耦,且使基板张力和基板横向偏移满足预期性能指标。
按上述方案,所述的步骤S1中,具体步骤为:
S11:设基板为理想弹性体,基板与辊轴之间无滑动,基板速度与辊轴速度相同;设对辊的黏滞摩擦系数、转动惯量、角速度、半径、控制输入电流和转矩常数分别为B
S12:基板在输送过程中与辊轴之间遵循垂直进入法则,设杨氏模量为E,基板的横向偏移量为y,根据欧拉梁方程:
K
设常数C
y=C
设纠偏辊架的跨距为L
进一步的,所述的步骤S2中,具体步骤为:
S21:设y
y=h(x,u)=[x
S22:设偏差变量Δx=x-x
选择放卷初始阶段作为系统的稳态工作点,
进一步的,所述的步骤S3中,具体步骤为:
S31:设x为N维状态变量,u为m维输入向量,y为m维输出向量,A∈R
令输入矩阵和输出矩阵均为满秩矩阵,则用传递函数矩阵G(s)表示卷到卷系统输入输出关系为:
y(s)=G(s)u(s)=C(sI-A)
设矩阵C的第i行为c
将卷到卷系统输入输出关系公式展开为:
得到:
y
S32:设r为m维参考输入向量,K为m×n维状态反馈矩阵;设L为m×m维非奇异输入变换矩阵,L用于重组输入变量,L的非奇异性保证m个独立的输入变量经重组变换后加到输入矩阵B的变量仍为m个独立输入量;采用状态反馈结合输入变换的形式,设系数矩阵L和矩阵K,则控制律为:
u=Lr-Kx;
将控制律代入卷到卷系统的线性状态空间模型得到:
代入卷到卷系统的传递函数矩阵G(s)为:
G(s)=C(sI-(A-BK))
基于状态反馈解耦理论和极点配置方法设计控制律,使传递函数矩阵G(s)为非奇异对角矩阵:
则卷到卷系统的每个输出变量与输入变量一一对应,实现了各控制输入、输出变量之间的解耦。
进一步的,所述的步骤S32中,求解矩阵L和矩阵K使传递函数矩阵G(s)为非奇异对角矩阵的具体步骤为:
S321:计算传递函数矩阵G(s)的结构特征值d
S322:计算直接传输矩阵E=[e
S323:按ITAE最优准则对解耦的卷到卷系统进行极点配置,优化解耦控制律满足解耦后的基板张力和横向偏移性的动态和稳态性能;设计解耦后包括基板张力、辊轴速度和基板横向偏移的第i个子系统期望的传递函数;
S324:求解矩阵L和矩阵K。
进一步的,所述的步骤S321中,具体步骤为:
设g
设系统传递函数矩阵G(s)的结构特征值d
d
对卷到卷系统的线性状态空间模型的y
进一步推导有如下式子:
则系统传递函数矩阵G(s)的结构特征向量e
e
进一步的,所述的步骤S322中,具体步骤为:
将结构特征向量e
设从u到
令
u=E
则
L=E
设参考输入向量r的元素为r
进行拉普拉斯变换得到系统的输入输出关系为:
上式中的传递函数矩阵为对角形式,则基板张力、辊轴速度和基板横向偏移完全解耦为3个独立子系统。
进一步的,所述的步骤S323中,具体步骤为:
设第i个子系统期望的传递函数为
输入输出的微分方程表示为:
将
设
β
令
综合
得到参考输入与参考输出之间的关系为:
得到:
进一步的,所述的步骤S324中,具体步骤为:
解耦控制律最终变换为如下形式:
u=-E
对照控制律的基本形式u=Lv-Kx,得到:
L=E
K=E
一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法。
本发明的有益效果为:
1.本发明的卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法,基于卷绕基板的纵向和横向动力学,建立了包括张力、速度和横向偏移的多变量耦合模型,基于状态反馈解耦方法设计解耦控制律,应用ITAE最优极点配置方法对解耦控制律进行优化,实现了卷到卷系统的张力、速度和横向偏移的动态解耦,达到了预期的动态性能。
2.本发明考虑了卷到卷系统中基板张力、速度和横向偏移的耦合因素,建立了卷到卷系统的多变量非线性耦合模型,提高了张力和横向偏移的控制精度。
3.本发明在稳态工作点附近对卷到卷系统的非线性耦合模型进行线性化处理,基于状态反馈解耦方法设计解耦控制律,实现基板张力和横向偏移的动态解耦,提高了系统的稳定性和抗干扰性能。
4.本发明基于最优化方法对解耦控制律进行优化,改善了基板张力和横向偏移的动态性能,实现预期设计指标。
附图说明
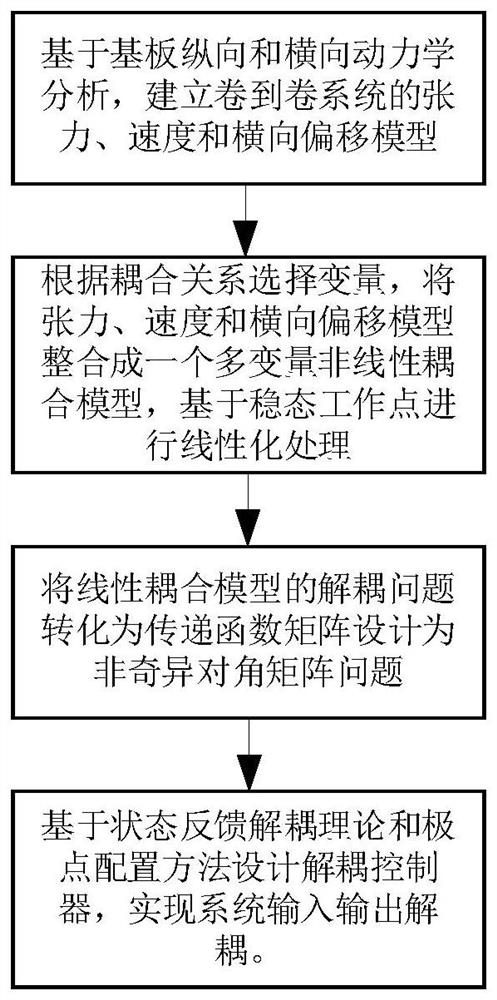
图1是本发明实施例的流程图。
图2是本发明实施例的卷到卷系统中的放卷系统示意图。
图3是本发明实施例的纠偏装置和基板横向偏移的侧视图。
图4是本发明实施例的纠偏装置和基板横向偏移的俯视图。
图5是本发明实施例的状态反馈解耦控制原理框图。
图6是本发明实施例的放卷系统的控制结构图。
图7是本发明实施例的速度v
图8是本发明实施例的张力T
图9是本发明实施例的横向偏移y
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明实施例以卷到卷系统中耦合情况较严重的放卷系统进行示例说明,如图2所示。在此对放卷系统进行扩展,范围从放卷电机到邻近的对辊电机,放卷电机和对辊电机之间的基板张力为放卷张力T
本发明实施例的卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法的流程图参见图1。
第一步:通过基板纵向和横向动力学分析,建立放卷系统的基板张力、速度和横向偏移模型。
通过基板纵向动力学研究,基于质量守恒定律、胡克定律、力矩平衡建立基板张力T
其中,B
基板在输送过程中与辊轴之间遵循垂直进入法则,欧拉梁方程
y=C
其中,C
其中,L
通过上述模型可知,张力、速度和横向偏移相互耦合。
第二步:建立放卷系统的多变量非线性耦合模型。选取系统状态变量x,输入变量u,输出变量y如下:
其中,三个输入变量I
将张力、速度和横向偏移模型进行整合,得到如下多变量非线性耦合模型:
y=h(x,u)=[x
第三步:多变量非线性耦合模型的线性化。选取放卷系统的初始阶段作为稳态工作点,
其中,x为N维状态变量,u为3维输入向量,y为3维输出向量,A∈R
y(s)=G(s)u(s)=C(sI-A)
令G(s)的元素为g
第四步:通过状态反馈解耦方法设计解耦控制律,状态反馈解耦控制器对张力、速度和横向偏移进行解耦。
图5为状态反馈解耦控制的原理框图,其中控制律u采用状态反馈结合输入变换的形式,控制律设计为u=Lr-Kx。
其中,r为3维参考输入向量,K为3×5维状态反馈矩阵,L为3×3维非奇异输入变换矩阵,L用来对输入变量进行重组,其非奇异性可保证3个独立的输入变量经重组变换后加到输入矩阵B的变量仍为3个独立输入量。
将上述控制律代入放卷系统的线性状态空间模型,可得:
此系统闭环传递函数矩阵如下:
G(s)=C(sI-(A-BK))
g
将y
设G(s)为线性系统的3维传递函数矩阵,d
其中,e
对于3×3维线性系统(A,B,C),特征结构向量定义为
令
u=E
由控制律的基本形式u=Lr-Kx,可知L=E
其中,r
上式中的传递函数矩阵为对角形式,此时放卷系统的基板张力、速度和横向偏移完全解耦。
第五步:按ITAE最优准则对解耦的放卷系统进行极点配置,优化解耦控制器,满足张力和横向偏移的动态和稳态性能。
为了保持系统的解耦特性不变,对得到的m个积分器形式的子系统,只能对每个子系统引入该子系统的输出及其d
假设第i个子系统期望的传递函数为
将上式表示为微分形式,如下所示:
将
令
上式所涉及的H以及β
经过极点配置后,有如下关系:
由此得到参考输入与参考输出之间的关系如下:
其中,
u=-E
对照控制律的基本形式u=Lv-Kx,可得L=E
ITAE最优准则的N维标准传递函数的分母多项式系数表如下表所示,通过对解耦后系统进行极点配置,改善控制系统的动态性能。
为了保持放卷系统的解耦特性不变,对解耦后得到的3个积分器形式的子系统,只能对每个子系统引入该子系统的输出及其d
(a)计算系统传递函数矩阵G(s)的结构特征值d
(b)计算直接传输矩阵E=[e
(c)根据ITAE最优准则设计解耦后第i个子系统期望的传递函数,由结构特征值d
(d)计算极点配置解耦控制律u=Lr-Kx;
图6为放卷系统基于状态反馈解耦控制的原理框图,控制变量是基板张力T
图7为速度v
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
- 卷到卷系统的基板张力和横向偏移状态反馈解耦控制方法
- 一种起重机大车电缆卷盘实时张力控制方法及其系统