一种车辆交通定位系统
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于交通定位技术领域,具体涉及一种车辆交通定位系统。
背景技术
在交通定位技术领域中,大多通过卫星对车辆进行定位。但是,卫星定位仅适用于粗精度的车辆定位,对于车道级的细定位则存在着较大的误差。在无人驾驶逐渐成为趋势的当下,精细距离的定位误差可能导致交通事故,造成重大损失。另外,卫星定位作为一种视距技术,对位于高架下、隧道内的车辆无法实现定位,从而造成了定位盲点。因此,急需一种有效的解决方案,实现细精度、无盲点的车辆交通定位。
发明内容
为了解决现有技术中所存在的上述技术问题,本发明提供了一种车辆交通定位系统。
本发明要解决的技术问题通过以下技术方案实现:
一种车辆交通定位系统,包括:基站、移动边缘计算节点以及若干车辆;其中,每个所述车辆均配备卫星定位模块、移动通信模块和测距模块;所述移动通信模块用于与所述基站进行通信;
每个所述车辆,用于响应于收到所述基站发送的广播信息,利用自身配备的测距模块确定其他车辆与自身之间的距离,得到测距信息;将自身的卫星定位坐标和得到的测距信息发送至所述基站;
所述基站,用于根据自身的卫星定位坐标对收到的车辆的卫星定位坐标进行修正,得到修正坐标信息;利用收到的测距信息构建距离矩阵;将所述距离矩阵和所述修正坐标信息发送至所述移动边缘计算节点;
所述移动边缘计算节点,用于根据所述距离矩阵计算各个所述车辆的拓扑坐标,得到拓扑信息;根据所述拓扑信息和所述修正坐标信息,将各个所述车辆的拓扑坐标转换为二维空间坐标,并将各个所述车辆的二维空间坐标发送至所述基站;其中,所述拓扑信息用于刻画所有所述车辆的交通拓扑关系;
所述基站,还用于将收到的二维空间坐标分发给对应的车辆。
可选地,所述测距模块包括:雷达测距模块和/或UWB测距模块。
可选地,所述移动边缘计算节点根据所述距离矩阵计算各个所述车辆的拓扑坐标,得到拓扑信息,包括:
根据所述距离矩阵,利用MDS-MAP算法,MDS-MAP(P)算法或MDS-MAP(P,R)算法计算各个所述车辆的拓扑坐标,得到拓扑信息。
可选地,所述移动边缘计算节点根据所述拓扑信息和所述修正坐标信息,将各个所述车辆的拓扑坐标转换为二维空间坐标,包括:
根据所述拓扑信息和所述修正坐标信息,利用最小二乘法计算坐标旋转因子,并根据所述坐标旋转因子和所述拓扑信息计算坐标平移因子;
利用所述坐标旋转因子对每个所述车辆的拓扑坐标进行旋转,得到该车辆的旋转后的坐标;
利用所述坐标平移因子对每个所述车辆的旋转后的坐标进行平移,得到该车辆的二维空间坐标。
可选地,所述基站根据自身的卫星定位坐标对收到的车辆的卫星定位坐标进行修正,得到修正坐标信息,包括:
获取参考误差;
根据所述参考误差对收到的车辆的卫星定位坐标进行修正,得到修正坐标信息。
可选地,所述基站获取参考误差,包括:
从卫星获取自身的卫星定位坐标;
将获取的卫星定位坐标与预设的自身标准坐标做差,得到参考误差。
可选地,任一所述车辆配备的卫星定位模块和移动通信模块为与该车辆绑定的智能移动终端中集成的模块。
可选地,所述卫星定位模块包括:GPS定位模块或北斗定位模块,
本发明提供的车辆交通定位系统中,通过测试两两车辆之间的距离获得距离矩阵,并根据该距离矩阵计算出能够刻画所有车辆间的交通拓扑关系的拓扑信息;然后,根据该拓扑信息和修正后的卫星定位坐标,将每个车辆的拓扑坐标转换为精确的二维空间坐标,实现了车辆的协同定位。其中,由于测距模块的测量精度可精确到1米以下,故本发明中的车辆交通定位的定位精度较高,且定位精度对测距误差不敏感。并且,本发明中运算量大的任务由移动边缘计算节点承担,边缘计算大大缩短了数据上传和下载的时间,避免了拥堵,同时缩短了计算时间,为车辆定位所需的超高可靠、超低时延通信提供了保证,使得本发明能够适用于大规模交通场景。
另外,本发明的硬件实现简单,无需部署路测单元,系统实现成本较低。
以下将结合附图及对本发明做进一步详细说明。
附图说明
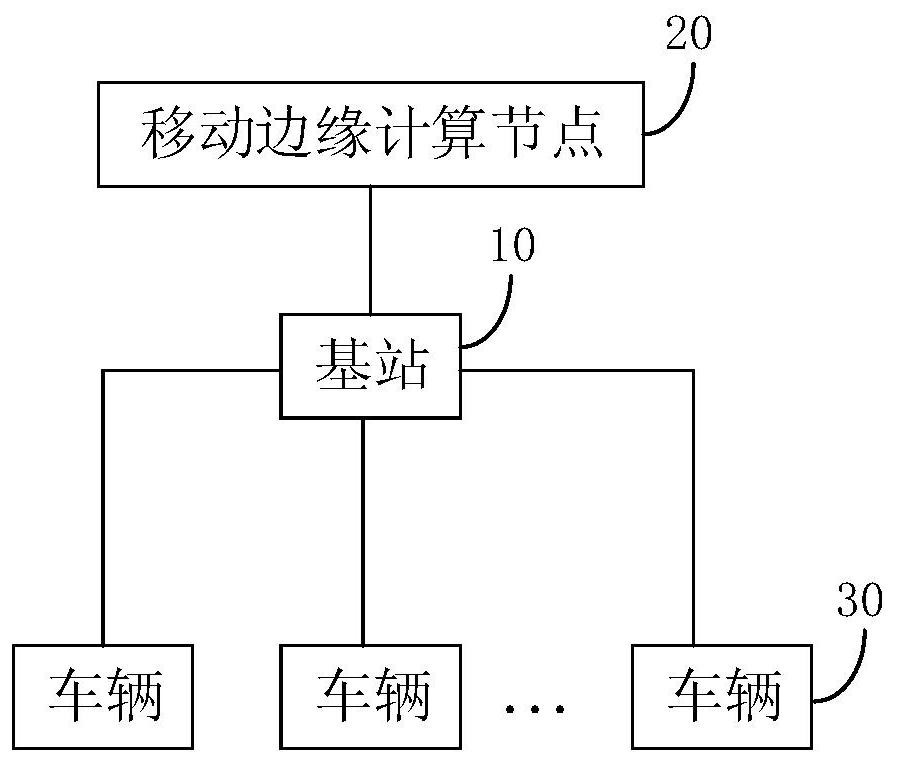
图1是本发明实施例提供的一种车辆交通定位系统的结构示意图;
图2是本发明实施例提供的车辆交通定位系统中各部分交互工作的示意图;
图3对比性地示出了现有GPS定位、本发明实施例两者的定位误差与GPS配比α的关系的箱型图;
图4对比性地示出了现有GPS定位、本发明实施例两者的定位误差与GPS误差3σ
具体实施方式
下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
为了实现细精度、无盲点的车辆交通定位,本发明实施例提供了一种车辆交通定位系统,如图1所示,包括:基站、移动边缘计算节点以及若干车辆;其中,每个车辆均配备有卫星定位模块、移动通信模块和测距模块;该移动通信模块用于与基站进行通信。
其中,卫星定位模块可以包括GPS定位模块或北斗定位模块。移动通信模块可以包括:3G移动通信模块、4G移动通信模块或5G移动通信模块等等;测距模块可以包括雷达测距模块和/或UWB(Ultra Wide Band,超宽带)测距模块。在实际应用中,任一车辆配备的卫星定位模块和移动通信模块可以为与该车辆绑定的智能移动终端中集成的模块;当然,对于有些车辆而言,其自身原本就可以搭载卫星定位模块和移动通信模块;也就是说,本发明实施例对车辆的卫星定位模块、移动通信模块以及测距模块的具体配备方式不做限定。
该车辆交通定位系统中,每个车辆用于响应于收到基站发送的广播信息,利用自身配备的测距模块确定其他车辆与自身之间的距离,得到测距信息;将自身的卫星定位坐标和得到的测距信息发送至基站。
具体而言,基站会定期向车辆发送广播信息,位于通信范围内的车辆都可以收到该广播信息;另一方面,卫星会给车辆的卫星定位模块发送卫星定位信号,故车辆可以获得自身的卫星定位坐标。当车辆收到广播信息时,便可以通过配备的测距模块来测量与其他车辆之间的距离,并确定自身当前的卫星定位坐标;然后,将自身的卫星定位坐标和得到的测距信息发送至基站。
基站用于根据自身的卫星定位坐标对收到的车辆的卫星定位坐标进行修正,得到修正坐标信息;利用收到的测距信息构建距离矩阵;将距离矩阵和修正坐标信息发送至移动边缘计算节点。
可以理解的是,该距离矩阵中的元素是两两车辆之间的距离。
在实际应用中,卫星同样会给基站发送基站的卫星定位坐标,故基站可以根据自身的卫星定位坐标对每个通信的车辆的卫星定位坐标进行修正,从而得到各个车辆修正后的卫星定位坐标,作为上述的修正坐标信息。
移动边缘计算节点,用于根据距离矩阵计算各个车辆的拓扑坐标,得到拓扑信息;根据拓扑信息和修正坐标信息,将各个车辆的拓扑坐标转换为二维空间坐标,并将各个车辆的二维空间坐标发送至基站;其中,拓扑信息用于刻画所有车辆的交通拓扑关系。
可以理解的是,移动边缘计算节点可利用无线接入网络就近提供计算服务,从而提供高性能、低延迟与高带宽的计算服务,为车辆定位所需的超高可靠、超低时延通信提供保证。
其中,移动边缘计算节点具体可以根据距离矩阵,利用多维尺度分析算法计算各个车辆的拓扑坐标。这里,多维尺度分析算法如经典MDS(Multiple Dimensional Scaling)算法、MDS-MAP算法,MDS-MAP(P)算法以及MDS-MAP(P,R)算法等等;其中,MDS-MAP算法,MDS-MAP(P)算法以及MDS-MAP(P,R)算法均属于经典MDS算法的改进算法,三者的改进之处在于:无需测量到所有车辆两两之间的距离。
可以理解的是,在得到刻画有所有车辆的交通拓扑关系的拓扑信息后,移动边缘计算节点结合修正坐标信息,便可以将该拓扑信息所包含的各个拓扑坐标转换为兼顾车辆协同的精确的二维空间坐标。其中,需要说明的是,该修正坐标信息中无需包含有基站通信范围内的全部车辆的修正后的卫星定位坐标;这是因为,在拓扑信息已能够刻画出所有车辆的交通拓扑关系的前提下,部分车辆的修正后的卫星定位坐标已提供了足够的参考。结合实际来说,即使部分车辆的卫星定位功能不可用,该拓扑信息也能够对这些车辆实现拓扑定位。
另外,上述基站还用于将收到的二维空间坐标分发给对应的车辆。
本发明提供的车辆交通定位系统中,通过测试两两车辆之间的距离获得距离矩阵,并根据该距离矩阵计算出能够刻画所有车辆间的交通拓扑关系的拓扑信息;然后,根据该拓扑信息和修正后的卫星定位坐标,将车辆的拓扑坐标转换为精确的二维空间坐标,实现了车辆的协同定位。其中,由于测距模块的测量精度可精确到1米以下,故本发明中的车辆交通定位的定位精度较高,且定位精度对测距误差不敏感。并且,本发明中运算量大的任务由移动边缘计算节点承担,边缘计算大大缩短了数据上传和下载的时间,避免了拥堵,同时缩短了计算时间,为车辆定位所需的超高可靠、超低时延通信提供了保证,使得本发明能够适用于大规模交通场景。
并且,本发明的硬件实现简单,无需部署路测单元,系统实现成本较低。
可选地,在一种实现方式中,基站根据自身的卫星定位坐标对所有车辆的卫星定位坐标进行修正,得到修正坐标信息,包括:
获取参考误差;
根据该参考误差对所有车辆的卫星定位坐标进行修正,得到修正坐标信息。
其中,基站获取参考误差的方式可以是直接获取预先设定好的参考误差,或者,基站也可以先从卫星获取自身的卫星定位坐标;然后将获取的卫星定位坐标与预设的自身标准坐标做差,得到实时获取的参考误差。
在一个实施例中,移动边缘计算节点根据拓扑信息和修正坐标信息,将每个车辆的拓扑坐标转换为二维空间坐标,可以包括:
(1)根据拓扑信息和修正坐标信息,利用最小二乘法计算坐标旋转因子,并根据坐标旋转因子和拓扑信息计算坐标平移因子。
(2)利用坐标旋转因子对每个车辆的拓扑坐标进行旋转,得到该车辆的旋转后的坐标;
(3)利用坐标平移因子对每个车辆的旋转后的坐标进行平移,得到该车辆的二维空间坐标。
该实现方式中,使用最小二乘法计算坐标旋转因子,能够使得最终变换得到的二维空间坐标与基站修正后的卫星定位坐标的差的平方和最小。
为了方案更为清楚,下面以一个具体的实施例为例,对本发明实施例提供的车辆交通定位系统进行详细的举例说明。该实施例中,假设车辆的数量为N,每个车辆均可测量到另外N-1个车辆与其自身之间的距离;另外,卫星定位采用的是GPS定位。
具体而言,参见图2所示,本发明实施例提供的车辆交通定位系统的工作流程可以参见如下:
(1)车辆从卫星获取GPS定位信号。
这里,用g
(2)基站从卫星获取GPS定位坐标。
这里,基站的GPS定位坐标可以用g
(3)基站向所有车辆发送广播信息。
(4)收到基站广播信息的车辆向基站发送应答信息,并向基站发送自身的GPS定位坐标和测距信息。
具体的,当车辆收到基站广播信息,则可以向基站发送应答信息以建立车辆与基站之间的通信链路。然后,车辆通过雷达测距模块和/或UWB测距模块测量自身与其他车辆间的距离,得到测距信息;接着,车辆将该测距信息连同自身的GPS定位坐标一起发送给基站。
这里,可以用d
(5)基站对收到的车辆的GPS定位坐标进行修正,得到修正坐标信息;以及,利用接收的测距信息构建距离矩阵,并将修正坐标信息和距离矩阵发送给移动边缘计算节点。
具体的,基站在选址建设时就有精确的自身标准坐标g,基站首先计算参考误差ε=g-g
其中,d
(6)移动边缘计算节点根据距离矩阵计算所有车辆的拓扑坐标,得到拓扑信息;再根据拓扑信息和修正坐标信息,将所有车辆的拓扑坐标转换为二维空间坐标返回给基站。
具体的,由于该实施例中可以测量到所有车辆两两之间的距离,故移动边缘计算节点可以根据该距离矩阵D,采用经典MDS算法计算所有车辆的拓扑坐标。具体计算过程可以参见如下:
(a)基于距离矩阵D计算内积矩阵B={b
(b)对内积矩阵B进行特征分解:
B=UΛU
其中,Λ=diag(λ
(c)用内积矩阵B最大的前两个的特征值构成对角矩阵Λ′=diag(λ
另外,移动边缘计算节点根据拓扑信息和修正坐标信息,将所有车辆的拓扑坐标转换为二维空间坐标的过程可以参见如下步骤:
(d)对修正坐标信息P和所有车辆的拓扑坐标C进行去均值操作:
其中,
(e)将
其中,U为左奇异矩阵,V为右奇异矩阵,(·)
(f)用奇异值分解结果计算坐标旋转因子R=UV
(h)使用坐标旋转因子R对所有车辆的拓扑坐标C进行旋转,得到所有车辆旋转后的坐标C′=RC。
(i)计算旋转后的坐标C′的平均值μ
t=μ
其中,c
(j)使用坐标平移因子t将所有车辆的旋转后的坐标C′进行平移,得到所有车辆的二维空间坐标X:
其中,1
(7)基站将收到的所有车辆的二维空间坐标X分发给对应的车辆,使得所有车辆都获得了更为准确的定位信息。
本发明实施例的有益效果还可以通过以下仿真结果进行说明。仿真条件包括:在大小为100m×100m×100m的空间内部署30个车辆,并随机生成他们的位置坐标作为他们各自的卫星定位坐标;车辆两两之间可以测距,若距离小于或等于100m,则使用雷达进行测距,若距离大于100m,则使用UWB进行测距。
在实际衡量系统所使用的算法的性能时,希望不光能展现定位的平均误差,还能展现定位的上下界。因此,我们采用了箱型图来展现定位性能。在箱型图中,填充有颜色的矩形上端表示在10000次蒙特卡洛仿真中的25%处的定位误差,下端表示在75%处的定位误差,矩形中间的线表示定位误差的中位数;矩形上方延伸的虚线的顶端表示算法在10000次蒙特卡洛仿真中的最大定位误差,矩形下方延伸的虚线的底端表示最小定位误差。
仿真1,设修正后的GPS定位坐标在经度和维度上的误差都不超过1m,车辆之间采用雷达测距的测距误差不超过0.1m,采用UWB测距的测距误差不超过1m,分别采用现有的GPS定位和本发明实施例对车辆进行定位,定位效果参见图3所示;图3对比性地示出了现有GPS定位、本发明实施例两者的定位误差与GPS配比α的关系的箱型图;其中,标记为GPS的箱型图对应现有的GPS定位,标记为经典MDS和改进MDS的箱型图分别对应本发明实施例的两种不同实现方式,α为能够收到GPS定位信息的车辆数占车辆总数的百分比。
从图3中可以看到,本发明实施例的定位坐标与车辆的真实坐标非常接近,而现有的GPS定位坐标与车辆的真实坐标存在一定的偏差。
仿真2,设修正后的GPS定位坐标在经度和维度上的误差都不超过1m,设车辆之间采用雷达测距的测距误差不超过0.1m,采用UWB测距的测距误差不超过1m;基于此设定,分别采用现有的GPS定位和本发明实施例对车辆进行定位,定位效果参见图4所示;图4对比性的示出了现有GPS定位、本发明实施例两者的定位误差与GPS误差3σ
从图4中可以看到,本发明实施例的定位坐标随修正后GPS定位坐标的误差的增大而增大;修正后GPS定位坐标的误差越小,改进MDS算法在经典MDS算法上的性能提升越大,当修正后GPS定位坐标的误差不超过0.5m时,改进MDS算法可以实现对车辆的厘米级的定位。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
尽管在此结合各实施例对本申请进行了描述,然而,在实施所要求保护的本申请过程中,本领域技术人员通过查看所述附图、公开内容、以及所附权利要求书,可理解并实现所述公开实施例的其他变化。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种交通车辆鸣笛声源定位系统
- 一种轨道交通车辆的定位系统