基于三维点云的喷涂工件建模方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及自动化喷涂领域,具体涉及喷涂行业各种类型工件的建模。
背景技术
喷涂行业逐渐向自动化方向转型,喷涂工件建模技术作为自动喷涂的基础正 在得到越来越广泛的研究。现在主流的喷涂工件建模方法主要有3种,第一种是 参数曲面建模方法,这种方法通过数学表示式来逼近喷涂工件模型,数学表达式 的复杂程度能够直接反映出建模的精度,然而现在喷涂工件表面的几何特征已经 越来越复杂,在这种情况下,参数曲面建模方法虽然有很好的建模精度但是表示 形式过于复杂,降低了建模的效率;第二种是基于CAD模型曲面建模方法,这 种方法在喷涂前需要事先准备好喷涂工件的CAD模型,一旦喷涂工件的CAD 模型丢失则无法进行现场获取,喷涂的实时性难以得到保障;第三种是基于工件 扫描系统的曲面建模方法,这是一种逆向工程技术,通过三维测量传感器获取喷 涂工件的点云模型,再通过一系列的重建技术将喷涂工件点云模型重建,这种建 模方法能对任意形状的工件进行建模且具有很好的实时性,正在得到越来越广泛 的应用。
发明内容
本发明要克服现有技术的上述缺点,提供基于三维点云的喷涂工件建模方 法。
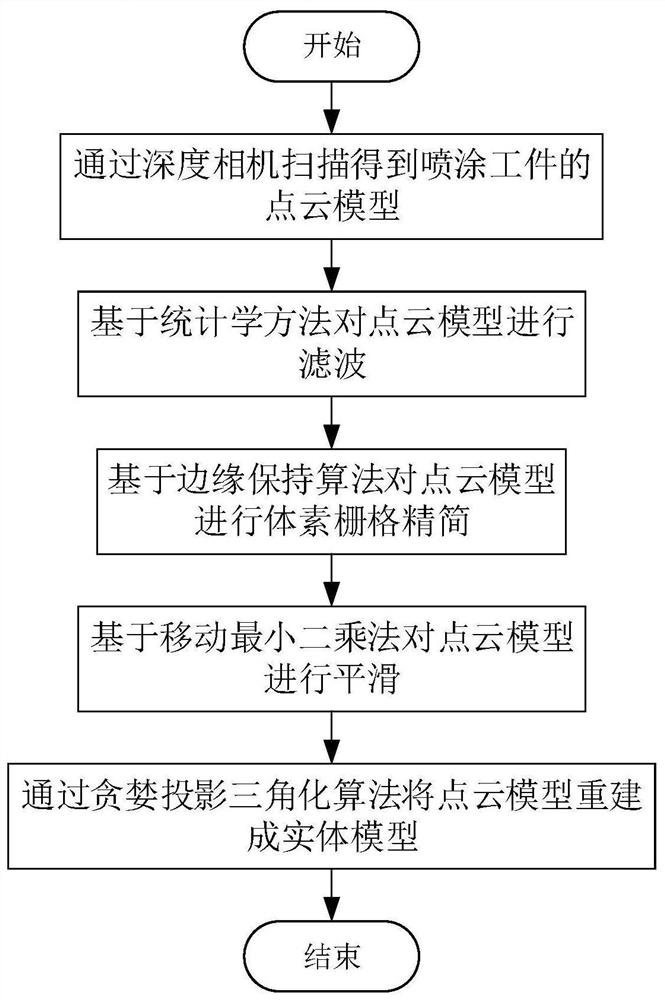
本发明通过以下技术方案实现:首先使用深度相机Kinect v2扫描得到喷涂 工件的点云模型;然后基于统计学方法对点云模型进行滤波以去除噪声点;其次 在用体素栅格法对点云模型进行精简的同时加入了提出的边缘保持算法;然后基 于移动最小二乘法对点云模型进行平滑;最后通过贪婪投影三角化算法将点云模 型重建成实体模型。
基于三维点云的喷涂工件建模方法,具体步骤如下:
步骤1:通过深度相机kinectv2扫描得到喷涂工件的点云模型。
步骤2:由于扫描得到的原始点云模型周边存在很多的噪声点,这些噪声点 的存在会对建模的精度造成很大的影响,因此这里采用统计学滤波的方法来去除 这些噪声点。为了提高点云数据的搜索效率,采用k-dtree数据结构进行点云之 间的快速近邻搜索。统计学滤波算法的步骤如下所示:
步骤2-1:通过k-dtree建立喷涂工件点云模型中所有点之间的拓扑结构;
步骤2-2:遍历喷涂工件点云模型中所有的点,假设每次取到的点为P
步骤2-3:计算所有的点的平均距离μ
这里,N是点云模型中所有点的数量。
步骤2-4:ε是一个比例值,如果
步骤3:喷涂工件点云模型的数据量非常庞大,处理这些数据将会非常消耗 运算资源。为了能够减少计算量,这里采用了体素栅格法对喷涂工件点云模型进 行精简。为点云模型创建一个大的三维体素栅格,这个大的体素栅格由很多小的 体素组成。在每个体素内,用体素中所有点的重心来近似体素中的其它点,如图 2所示。然而体素栅格法可能会破坏喷涂工件点云模型的边缘特征。为了确保喷 涂工件点云模型的形状不被破坏,这里提出了一种边缘保持算法,基于边缘保持 算法对喷涂工件点云模型进行体素栅格精简。通过边缘保持算法将喷涂工件点云 模型中的点区分为边缘点和非边缘点,将边缘点保留,将非边缘点进行体素栅格 精简。边缘保持算法的步骤如下所示:
步骤3-1:通过kd-tree建立喷涂工件点云模型中所有点之间的拓扑结构;
步骤3-2:遍历喷涂工件点云模型中的所有点,假设每次取到的点为P
步骤3-3:计算P
步骤3-4:计算P
步骤3-5:α是一个比例值,如果||C
步骤4:由于喷涂工件点云模型表面的点云数据存在波动,这会导致计算得 到的点云法向量非常杂乱且后续点云模型重建得到实体模型表面凹凸不平。因此 这里基于移动最小二乘法对喷涂工件点云模型进行平滑。
步骤5:最后通过贪婪投影三角化算法对平滑后的喷涂工件点云模型进行重 建,具体方法是将点云数据投影到某一局部二维坐标平面内,再在坐标平面内进 行平面内的三角化,最后根据平面内的三位点的拓扑连接关系获得一个三角网格 曲面模型,所得到的三角网格曲面模型就是重建得到的喷涂工件模型。
本发明的优点是:能对任意形状的喷涂工件进行建模并且在准确还原喷涂工 件的形状的基础上提高了建模的效率。
附图说明
图1是本发明方法的流程图。
图2是本发明的体素栅格精简法的示意图。
图3是本发明的实施例处理的摩托车扰流板。
图4是本发明的实施例处理的摩托车扰流板的点云模型。
图5a是滤波前摩托车扰流板点云模型,图5b是滤波后摩托车扰流板的点云 模型。
图6a是体素栅格精简后摩托车扰流板的点云模型,图6b是加入了边缘保持 算法后体素栅格精简后摩托车扰流板的点云模型。
图7a是平滑前摩托车扰流板的点云模型重建成的实体模型,图7b是平滑后 摩托车扰流板的点云模型重建成的实体模型。
图8是重建后摩托车扰流板的实体模型。
具体实施方法
为了能够更加清楚地理解本发明的目的、特征和优点,下面结合附图和具体 实施方法进一步对本发明的技术方案做详细的描述。
本发明是基于三维点云的喷涂工件建模方法,具体过程如下:
步骤1:喷涂工件是摩托车扰流板,如图3所示。通过深度相机Kinect v2 扫描得到摩托车扰流板的点云模型,如图4所示。
步骤2:基于统计学方法对点云模型进行去噪,这里k的取值为50,ε的取 值为2.5,如图5所示
步骤3:用体素栅格法对点云模型进行精简,这里体素的大小为边长为1cm 的立方体,得到精简后的点云模型如图6a所示,可以看到点云模型的边缘特征 在这个过程中被破坏了。加入了边缘保持算法后,边缘保持算法中k的取值为50, α的取值为2,精简得到的点云模型如图6b所示,可以看到点云模型的边缘特 征得到了很好的保留。
步骤4:基于移动最小二乘法对点云模型进行平滑,得到平滑后的点云模型。 由于平滑算法针对的对象是小尺度的噪声,平滑后的效果难以直接观察,所以将 点云模型重建成实体模型来观察平滑算法的效果。平滑之前的点云模型重建成的 实体模型如图7a所示,平滑之后的点云模型重建成的实体模型如图7b所示,相 比之下平滑之后点云模型重建成的实体模型表面的光滑程度得到了极大的提升。
步骤5:用贪婪投影三角化算法对点云模型进行重建,得到最终的喷涂工件 模型,如图8所示。
- 基于三维点云的喷涂工件建模方法
- 基于三维点云处理的管道三维建模方法