一种消防机器人用升降云台装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及升降云台技术领域,具体的说,涉及一种消防机器人用升降云台装置。
背景技术
消防机器人在实施救援作业中,往往通过机器人所配备的云台进行灾区的侦察与勘测,在实施勘测作业中由于云台的高度及机器人自身的体积不同导致云台勘测中的盲区大小不一,从而影响到消防机器人的勘测准确度,为救援作业带来不便。随着消防机器人的发展,逐渐的取代了人员进入灾区进行侦察作业,如何消除机器人侦察盲区成为急需解决的问题。
发明内容
针对上述现有技术的不足,本发明的目的在于提供一种消防机器人用升降云台装置,该装置采用定滑轮的提升机构,利用成熟的位移传感技术,使其能够高效快速的完成云台升降作业,配备大扭矩电机,配合专用的导缆机构,能够稳定准确的实施升降作业。
本发明的技术方案具体如下。
一种消防机器人用升降云台装置,其包括主体支撑机构、卷缆机构、导缆机构和升降机构;其中:
主体支撑机构包括云台主支架、云台升降支架和安装底板;安装底板水平设置于云台主支架的中下部,安装底板上方设置云台升降支架, 云台升降支架呈下端开口结构,其活动嵌套于云台主支架内;
卷缆机构包括卷缆机构支架、电机、电机齿轮、卷缆齿轮、卷缆滚筒和位移传感器;卷缆机构支架设置在安装底板的下方,卷缆机构支架上连接有半圆凸台,电机齿轮、卷缆齿轮、卷缆滚筒和位移传感器均安装在卷缆机构支架上,电机齿轮的转动由电机驱动,电机的出轴安装在卷缆机构支架的半圆凸台上,半圆凸台的上方安装自锁块,半圆凸台和自锁块之间用弹簧连接,自锁块内侧设有橡胶块,自锁块和半圆凸台围成一整圆,用于包裹电机的出轴端,半圆凸台一侧的下方垂直安装电磁体,位移传感器的传感器端正对着电机齿轮,卷缆齿轮和电机齿轮相啮合,卷轮齿轮套设在长轴外,长轴外还套设有卷缆滚筒;
导缆机构包括导缆齿轮、导缆主轴、导缆滑块和导缆导向杆;导缆齿轮和卷缆齿轮相啮合,导缆齿轮的中心位置设有导缆主轴,导缆主轴为丝杆,导缆主轴穿过导缆滑块上的内丝孔,导缆导向杆有两根,导缆导向杆穿过导缆滑块上的上下布置的两个光孔;导缆主轴、导缆导向杆和卷缆滚筒相互平行设置;导缆滑块的滑块上方设置导缆孔;
升降机构包括滑轮支撑杆、导向柱、第一滑轮、钢索限位块、第二滑轮和钢索;滑轮支撑杆安装在安装底板上,滑轮支撑杆的上部设置第一滑轮,靠近第一滑轮的位置设置钢索限位块;导向柱有四根,固定安装在安装底板的四个角上,导向柱的高度高于滑轮支撑杆的高度,第二滑轮安装在安装底板上;钢索的一端固定在云台升降支架侧壁下部的安装环处,另一端依次通过第一滑轮、第二滑轮和导缆机构的导缆孔固定于卷缆滚筒上。
本发明中,第二滑轮通过滑轮支座安装在安装底板上。
本发明中,卷缆机构中的长轴通过第一工程塑料轴承安装在卷缆机构支架上。
本发明中,导缆机构中的导缆主轴通过第二工程塑料轴承安装在卷缆机构支架上。
本发明中,还包括信号处理器和远程控制终端。
和现有技术相比,本发明的有益效果在于:
本发明提供一种消防机器人用升降云台装置,采用移动远程终端控制装置的正常工作,工作人员在使用过程中可通过远程终端控制本装置,可完成云台的升降作业,操作简单,省时省力,具有快速准确的完成云台升降作业能力,且有效的降低经济和人员损耗。具有较高的稳定性、实用性、安全性等特点,且造价低廉、结构简单和机动灵活性强。
附图说明
图1是本发明的消防机器人用升降云平台装置的整体示意图。
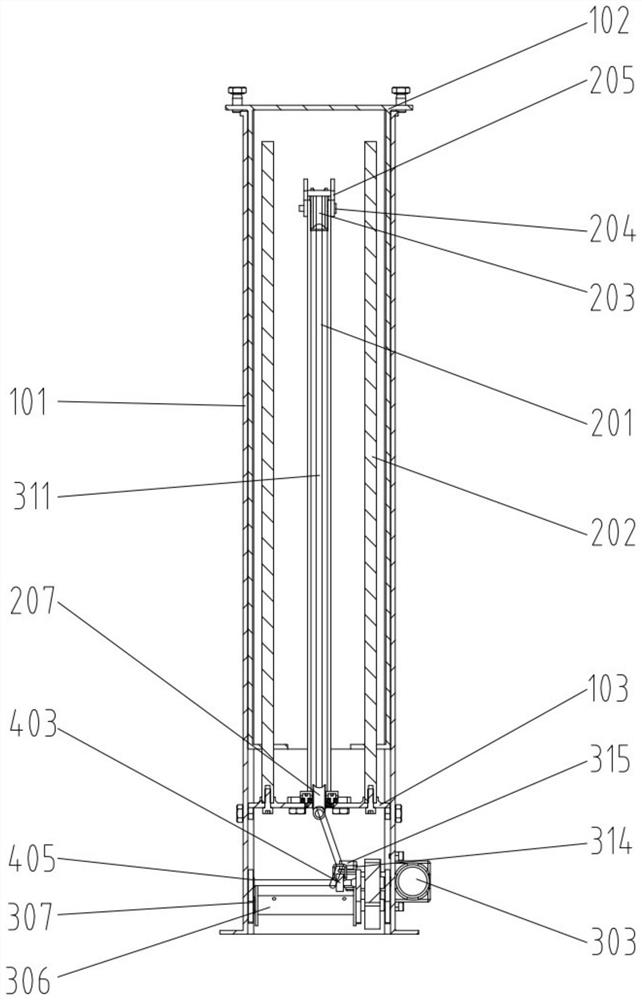
图2是本发明的消防机器人用升降云平台装置的结构示意图。
图3是本发明的升降机构示意图。
图4是本发明的卷缆机构及导缆机构结构示意图。
图5是本发明的导缆滑块结构示意图。
图6是本发明的云台升降支架仰视图。
图7是本发明的卷缆机构主支架结构示意图。
图8是本发明的卷缆机构侧支架结构示意图。
图中标号:100-主体支撑机构,101-云台主支架,102-云台升降支架,103-安装底板,200-升降机构,201-滑轮支撑杆,202-导向柱,203-第一滑轮,204-第一滑轮销钉,205-钢索限位块,206-滑轮支座,207-第二滑轮,208-第二滑轮销钉,300-卷缆机构,301-卷缆机构主支架,302-卷缆机构侧支架,303-电机,304-电机齿轮,305-卷缆齿轮,306-卷缆滚筒,307-第一工程塑料轴承,308-电磁铁,309-自锁块,310-弹簧,311-钢索,312-橡胶块,313-自锁块转动销,314-位移传感器,315-位移传感器固定扣,400-导缆机构,401-导缆齿轮,402-导缆主轴,403-导缆滑块,404-导缆导向杆,405-第二工程塑料轴承,406-光孔,407-内丝孔,408-导缆孔。
具体实施方式
下面结合图1~8和具体实施例,对本发明作进一步的详细说明。
实施例1
实施例中,提供一种消防机器人用升降云台装置,其包括主体支撑机构100、升降机构200、卷缆机构300和导缆机构400。
主体支撑机构100包括云台主支架101、云台升降支架102和安装底板103。云台主支架101为本发明的主要支撑结构,其包括内外两部分,外部分布众多不见安装孔位。安装底板103位于云台主支架101的下半部分,其通过四颗螺钉与云台主支架101固定在一起。云台升降支架102设有一个,呈下端开口结构,位于云台主支架101的内部,呈嵌套状,云台升降支架102的内壁靠近底部的地方设有安装环,用于固定钢索311,本发明中装置的升降是通过钢索311的作用带动云台升降支架102的升降实现。
卷缆机构300包括卷缆机构主支架301、卷缆机构侧支架302、电机303、电机齿轮304、卷缆齿轮305、卷缆滚筒306、第一工程塑料轴承307、电磁铁308、自锁块309、弹簧310、钢索311、橡胶块312、自锁块转动销313、位移传感器314和位移传感器固定扣315。卷缆机构主支架301为卷缆机构300的主要支撑组件,位于安装底板103的下方,它通过两颗螺钉与云台主支架101连接。卷缆机构侧支架302位于卷缆机构主支架301长边侧,通过两颗螺钉与卷缆机构主支架301连接于一体。电机303安装于云台主支架101的外侧,其出轴端穿过云台主支架101,伸长至卷缆机构侧支架302的后部。电机齿轮304安装于卷缆机构主支架301与卷缆机构侧支架302长边侧的最外侧安装孔内,其两侧位于卷缆机构主支架301及卷缆机构侧支架302预留的凸台安装孔处,其花键孔与电机303出轴同轴且配合在一起。卷缆齿轮305安装于卷缆机构主支架301与卷缆机构侧支架302长边侧的中下侧安装孔内,其上设有长轴,轴头伸长至卷缆机构主支架301的短边侧。卷缆滚筒306位于卷缆齿轮305的长轴上。第一工程塑料轴承307位于卷缆齿轮305长轴的尾端与卷缆机构主支架301接触位置。电磁铁308位于卷缆机构侧支架302的后侧,其垂直的安装在卷缆机构侧支架302的半圆凸台的左侧。自锁块309安装在卷缆机构侧支架302半圆凸台上,并与其上半圆凸台构成一整圆,包裹住电机303的轴端。弹簧310连接卷缆机构侧支架302上的半圆凸台及自锁块309,橡胶块312位于自锁块309的内侧,橡胶块312具有防滑作用。自锁块转动销313连接卷缆机构侧支架302上的半圆凸台及自锁块309。不工作时,电磁体308吸合,自锁块309闭合,弹簧310处于压缩状态,和橡胶块312共同配合包裹电机303出轴;工作时,电磁体308断电,自锁块309解锁,弹簧310处于释放状态,电机303驱动电机齿轮304转动电机303驱动电机齿轮304转动带动卷缆齿轮305的转动,卷缆齿轮305的转动带动卷缆滚筒306的同步转动;位移传感器314位于卷缆机构侧支架302长边侧的上侧凸台上,其传感器端正对于电机齿轮304。位移传感器固定扣315将位移传感器314与卷缆机构侧支架302连接。
导缆机构400包括导缆齿轮401、导缆主轴402、导缆滑块403、导缆导向杆404和第二工程塑料轴承405。导缆齿轮401安装于卷缆机构主支架301与卷缆机构侧支架302长边侧的内侧安装孔内。导缆主轴402为右旋丝杆,其左端与导缆齿轮401连接,右端轴头伸长至卷缆机构主支架301的短边侧。导缆滑块403其上分布三个孔,分别为一内丝孔407和两光孔406,该内丝孔407为右旋内丝孔,与导缆主轴402配合。导缆导向杆404设有两根,且呈上下安装,连接卷缆机构主支架301与卷缆机构侧支架302,并穿入导缆滑块403的两光孔406内。两根导缆导向杆404的设置稳定好,且可防止导缆滑块403翻转;第二工程塑料轴承405位于导缆主轴402的尾端与卷缆机构主支架301接触位置。导缆滑块403的滑块上方为导缆孔。
升降机构200包括滑轮支撑杆201、导向柱202、第一滑轮203、第一滑轮销钉204、钢索311、钢索限位块205、滑轮支座206、第二滑轮207和第二滑轮销钉208。滑轮支撑杆201位于安装底板103的中心位置,其底端面与安装底板103接触,并通过两颗螺钉与安装底板103连接。导向柱202设有四根,分布在安装底板103的四个角上,其底端面与安装底板103的上表面接触,并通过四颗螺钉固定在四个角上。导向柱202主要是控制云台升降支架102的上升和下降的方向,起到导向的作业,防止云台升降支架102上升或下降过程中出现偏向一侧,避免出现卡住无法运动等问题。第一滑轮203安装在滑轮支撑杆201的上端。第一滑轮销钉204位于滑轮支撑杆201上端的销钉孔内,其水平插入销钉孔内。钢索限位块205位于滑轮支撑杆201的顶端,与第一滑轮203共用一根 第一滑轮销钉204。滑轮支座206设有两个,呈对称分布,位于安装底板103的中后部,分布于孔的两侧。第二滑轮207安装在两个滑轮支座206的中间位置,与滑轮支座206上的销钉孔同轴。第二滑轮销钉208安装在滑轮支座206的销钉孔内,连接滑轮支座206与第二滑轮207。钢索311的尾端位于云台升降支架102内部预设的安装环处,其通过第一滑轮203、第二滑轮207、导缆机构400,最后固定于卷缆滚筒306上。
工作时,实施例中的装置采用消防机器人主机供电;其内部设置信号处理器,具备实施信号接收与信号反馈功能;其与消防机器人共用远程手持终端控制器,利用控制器控制本装置升降及高度反馈功能。
实施方案:
将本装置完整的安装至消防机器人本体上,并将所有通讯与消防机器人连接。消防机器人进入灾区进行云台升降侦察作业时,工作人员控制远程控制终端发送升降命令,消防机器人接到指令,控制本装置完成升降作业。当上升控制信号传至本装置后,继电器断电致使自锁块309解锁,此时弹簧310处于释放状态,位移传感器314开始作业,信号驱动电机303开始转动,电机303带动电机齿轮304转动,因电机齿轮304、卷缆齿轮305与导缆齿轮401三齿轮啮合在一起,电机齿轮304转动,其余两齿轮也开始转动,同时位移传感器314通过电机齿轮304上设置的标记点进行位移记录,并将高度信息回传至远程控制终端。卷缆齿轮305开始转动,同时带动卷缆滚筒306转动,钢索311开始被缠绕至卷缆滚筒306上,云台升降支架102被拉动延导向柱202向上移动,在钢索311被缠绕的过程中,导缆机构400开始作业,导缆主轴402转动带动导缆滑块403移动,其牵引着钢索311向单向移动,便于卷缆机构300进行卷缆作业,防止钢索311缠绕堆积于一处影响装置整体性能,当云台升降支架102到达设定位置后,装置停止运行,在上升的过程中云台升降支架102可在运行到任意位置停止,停止后电磁铁308自动吸合,自锁块309将电机303主轴包裹住起到自锁功能。当整个装置需要下降至初始位置时,下降控制信号传至本装置后,电磁铁308断电致使自锁块309解锁,此时弹簧310处于释放状态,信号驱动电机303开始反向转动,云台升降支架102在自生重力作用下开始下降,同时钢索311开始释放,位移传感器314记录位移,到达设定位置后停止作业,电磁铁308吸合锁定电机303,完成云台升降作业。
以上实施方式仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以作出若干改进,这些都属于本发明专利的保护范围。因此,本发明专利的保护范围应一所附权利要求为准。
- 一种消防机器人用升降云台装置
- 用于消防机器人的升降云台装置