一种同轴式两档电驱动桥
文献发布时间:2023-06-19 12:18:04
技术领域
本发明属于机械和车辆传动领域,具体涉及一种同轴式两档电驱动桥。
背景技术
驱动桥作为一种常见的传动机构,广泛应用于机械及车辆的传动领域,为适应新能源汽车技术的发展,出现了由驱动电机驱动的电驱动桥,市面上的电驱动桥多为一档电驱动桥,能耗较高,无法满足比较复杂的变速要求,而市面上的两档电驱动桥的结构复杂,内置结构不够紧密,因此体积往往较大,不易安装布置。
发明内容
有鉴于此,本发明提供了一种同轴式两档电驱动桥,以解决现有技术中存在的问题,本发明提供的具体技术方案如下:
一种同轴式两档电驱动桥,包括驱动电机、二级行星减速机构和行星排差速器,所述驱动电机的输出轴与所述二级行星减速机构的输入端连接,所述二级行星减速机构的输出端与所述行星排差速器的输入端连接,所述行星排差速器包括两个输出端,所述行星排差速器的一个输出端连接左输出半轴,另一个输出端连接右输出半轴;
所述驱动电机的输出轴为空心轴,所述左输出半轴的自由端穿过空心轴并贯穿驱动电机设置到驱动电机另一端;
所述右输出半轴与所述左输出半轴反向设置且轴心位于同一条直线上。
进一步的,所述二级行星减速机构包括第一行星排、第二行星排、离合器以及制动器,所述第一行星排的第一齿圈通过制动器与驱动桥壳体连接,所述第二行星排的第二齿圈直接与驱动桥壳体连接,所述离合器的一端与第一行星排的第一太阳轮固定连接,另一端与第一行星排的第一行星架固定连接。
进一步的,所述第二行星排的第二行星轮为塔轮,所述塔轮包括大齿轮和小齿轮,所述第二行星排的第二太阳轮与大齿轮啮合,所述小齿轮与第二行星排的第二齿圈啮合,第二齿圈固定在驱动桥壳体上。
进一步的,所述行星排差速器包括复合行星排和差速锁,所述复合行星排包括第三行星排和第四行星排,所述第三行星排的第三行星轮与所述第二行星排的第二行星轮共用第二行星排的第二行星架,所述第二行星轮与所述第三行星轮分别设置于第二行星架的两侧且轴心在同一直线上,所述第三行星轮与所述第四行星排的第四行星轮外啮合构成复合行星排的偶合齿,所述第三行星排的第三太阳轮与左输出半轴连接,所述第四行星排的第四太阳轮与右输出半轴连接,所述第四行星排的第四行星架的一端与第二行星架固定连接,另一端通过差速锁与右输出半轴连接。
进一步的,所述差速锁为端面差速锁或湿式离合器差速锁。
进一步的,所述第四行星轮的轴向宽度大于所述第三行星轮的轴向宽度,第四行星轮与位于第四行星轮内侧的第三行星轮啮合并与第四太阳轮联动。
与现有技术相比本发明的有益效果为:
本发明通过设置二级减速器实现两个减速档位,进而配合驱动电机输出转速范围,实现无级变速,同时利用驱动电机空间将左输出半轴通过电机中心连接到差速器,节省了电驱动桥整体的轴向布置空间,使电驱桥的总体布置更方便。
附图说明
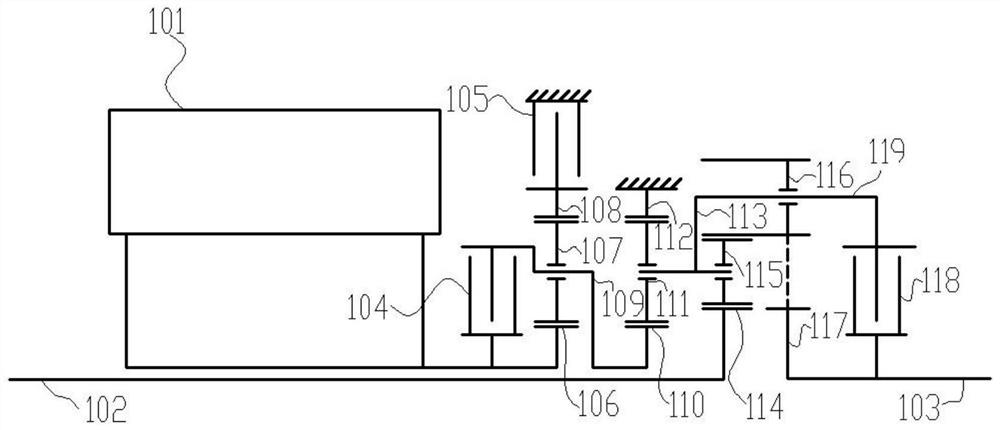
图1为本发明实施例1的结构示意图。
图2为本发明实施例2的结构示意图。
101-驱动电机、102-左输出半轴、103-右输出半轴、104-离合器、105-制动器、106-第一太阳轮、107-第一行星轮、108-第一齿圈、109-第一行星架、110第二太阳轮、111-第二行星轮、112-第二齿圈、113-第二行星架、114-第三太阳轮、115-第三行星轮、116-第四行星轮、117-第四太阳轮、118-差速锁、119-第四行星架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
实施例1
参照说明书附图1,一种同轴式两档电驱动桥,包括驱动电机101、二级行星减速机构和行星排差速器,所述二级行星减速机构包括第一行星排、第二行星排、离合器104以及制动器105,所述第一行星排包括第一太阳轮106、第一行星轮107、第一齿圈108及第一行星架109,所述第二行星排包括第二太阳轮110、第二行星轮111、第二齿圈112及第二行星架113,所述行星排差速器包括复合行星排和差速锁118,所述复合行星排包括第三行星排和第四行星排,所述第三行星排包括第三太阳轮114和第三行星轮115,所述第四行星排包括第四太阳轮117、第四行星轮116及第四行星架119;
所述驱动电机101的输出轴与所述第一太阳轮106连接,所述第一太阳轮106通过离合器104与第一行星架109连接,所述第一齿圈108通过制动器105与驱动桥壳体连接,所述第二齿圈112直接与驱动桥壳体连接,所述第二行星轮111与所述第三行星轮115共用第二行星架113,所述第二行星轮111与所述第三行星轮115分别设置于第二行星架113的两侧且轴心在同一直线上,所述第三行星轮115与所述第四行星轮116外啮合构成复合行星排的偶合齿,所述第三太阳轮114连接左输出半轴102,所述第四太阳轮117连接右输出半轴103,所述第四行星架119的一端与所述第二行星架113固定连接,所述第四行星架119的另一端通过差速锁118与右输出半轴103连接。
在本实施例中,为节省驱动桥的整体排布空间,驱动电机101的输出轴为空心轴,左输出半轴102的自由端穿过空心轴并贯穿驱动电机设置于驱动电机的另一端,同时左输出半轴102与右输出半轴103反向设置且两半轴的中心位于同一条直线上。
在本实施例中,差速锁118采用湿式离合器差速锁,在其他实施例中也可采用普通端面差速锁。
在本实施例中,第四行星轮116的轴向宽度大于第三行星轮115的轴向宽度,使第四行星轮116能够与位于第四行星轮内侧的第三行星轮115啮合的同时,通过传动机构与第四太阳轮117间接传动。
在本实例中,离合器104和制动器105分别结合构成第一行星排的两段工作档位,当离合器104分离制动器105结合时,驱动电机101的动力通过第一太阳轮106进入第一行星排,将驱动电机的转速减速后经过第一行星架109输出到第二太阳轮110。当离合器104结合而制动器105分离时,驱动电机的动力通过第一行星架109直接输出到第二太阳轮110。第二齿圈112与驱动桥壳体固定,第二行星排是一个固定工作状态的行星减速机构,第二行星轮111是普通行星轮;
驱动电机将电能转换为机械能后,经过二级行星减速机构转换后进入行星排差速器,该行星差速器通过一个没有齿圈的复合行星排实现,该行星排差速器通过配齿变化可以在紧凑空间实现左右车轮之间的1:1扭矩输出,满足车辆在通过不同路面左右两个车轮力量输出一致的需求,通过差速锁118可以将行星排差速器闭锁,满足车辆在困难路面的脱困需求。
实施例2
本实施例相对于实施例1唯一的区别在于,本实例中第二行星轮111为由一个较大直径的齿轮及一个较小直径的齿轮构成的塔轮,第二太阳轮110与塔轮中较大直径的齿轮啮合,较小直径的齿轮与固定在驱动桥壳体上的第二齿圈112啮合,本实施例通过将第二行星轮设置为塔轮的形式,进一步增大二级行星减速机构的减速比,从而满足不同的减速需求。
以上实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种同轴式两档电驱动桥
- 一种用于汽车的同轴式两档行星排电驱动桥