一种矿用本安型智能识别摄像仪
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及矿用监控设备领域,具体是指一种矿用本安型智能识别摄像仪。
背景技术
在煤矿井下监控时,通常由摄像仪进行采集图像并传输给地面服务器进行分析、处理、控制输出,其工作原理是摄像机采集的图像进行压缩编码后,通过传输模块透明传输给了地面服务器,地面服务器进行解码输出,其附属功能的实现均需通过地面服务器和平台软件实现,
但是这种煤矿井下监控设备在视频众多时无法一一顾及,而且需要进行人为监督,存在盲点,因此需要一种矿用本安型智能识别摄像仪以解决上述问题。
发明内容
为解决上述技术问题,本发明采用了以下技术方案:
一种矿用本安型智能识别摄像仪,包括摄像机、核心板、传输模块、地面交互界面,所述核心板上安装有图像处理模块,所述图像处理模块下载有基于神经网络的图像识别算法,图像处理模块在对图像识别、分析后交由核心板进行输入、输出控制,在通信建立的情况下将信号通过传输模块传输至地面交互界面;
图像处理模块识别功能的实现基于神经网络算法,通过需求分析、样本采集、辅助学习+认知训练、识别效果、运行确认来实现:
需求分析:需求分析用于确认识别场景,在对现场环境进行确认后进行下一步;
样本采集:根据摄像机的采样率,将视频流转换成逐帧的图片;
辅助学习+认知训练:通过工作人员进行人工筛选图片中的异物并进行标注所述异物,然后将图片传输给摄像机进行识别,辅助学习+认知训练时一个循环和持续的过程;
识别效果:随着图片基数积累的增加,识别效果逐步提升;
运行确认:在识别成功率大于95%时,即可投入使用;
进一步的,所述摄像机用于采集现场图片,所述图像处理模块用于识别现场图片;
进一步的,所述摄像机、所述核心板、所述传输模块均设置于壳体内。
进一步的,所述摄像机、所述核心板、所述传输模块、所述地面交互界面均电性连接;
进一步的,所述地面交互界面与控制器电性连接,控制器电性连接被监控的设备;
进一步的,所述摄像机型号为KBA12S或KBA12S(A);
进一步的,所述核心板上设有音频输入/输出节点;
进一步的,所述传输模块通过以太网光电、DSL、WIFI、模拟信号等方式传输信号;
进一步的,所述地面交互界面包括数据存储模块和管理APP。
采用以上技术方案,本发明具有以下有益效果:
(1)该矿用本安型智能识别摄像仪,在摄像机和传输模块之间增设了核心板,核心板上设置有能够进行图像识别和处理的图像处理模块,能够对摄像机所拍摄的视频或图片进行智能识别和处理,并可进行基于神经网络算法的深度学习,在识别异物时可以进行报警信号的传输,依托AI人工智能,实时分析,无需人员进行操作,实现全程智能化的运行。
(2)该矿用本安型智能识别摄像仪,根据摄像机识别的场景的不同,核心板上的图像处理模块能够进行智能识别,即一个摄像机可以识别多个场景且均能够进行智能识别和传输报警信号,相较于现有技术中,每一台识别摄像机只能实现一种特定的场景识别功能,若在同一个地理位置实现多种场景的识别,则需要多台识别摄像机且普通相机拓展识别功能的数量则由地面服务器决定。
(3)该矿用本安型智能识别摄像仪,摄像机、核心板、传输模块集成设置于壳体内,便于本装置的维护。
附图说明
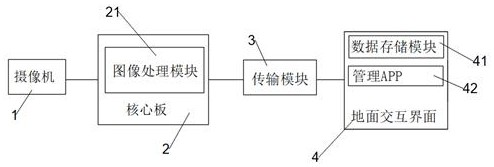
图1为一种矿用本安型智能识别摄像仪的组成框图;
图2为一种矿用本安型智能识别摄像仪的工作流程系统框图;
图3为一种矿用本安型智能识别摄像仪的智能识别过程的流程框图;
图4为一种矿用本安型智能识别摄像仪的实施例一的示意图;
图5为一种矿用本安型智能识别摄像仪的实施例二的示意图;
如图所示:
1、摄像机;2、核心板;21、图像处理模块;3、传输模块;4、地面交互界面;41、数据存储模块;42、管理APP;5、壳体;6、一字线红外激光发射器;7、红外频闪灯。
具体实施方式
为了更好地解释本发明,下面将结合实施例对本发明作进一步阐述,需要声明的是,以下内容仅是为了更好地说明本发明,并非是限制本发明权利要求书的保护范围;
在本发明的描述中,需要声明的是,术语“上”、“下”、“左”、“右”、“顶侧”、“底侧”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例一:
图1至图2,一种矿用本安型智能识别摄像仪,包括摄像机1、核心板2、传输模块3、地面交互界面4,摄像机1、核心板2、传输模块3、地面交互界面4均为电性连接,核心板2上加装有图像处理模块21,用于对采集图形的分析、处理、识别和输出,图像处理模块21中下载有基于神经网络的图像识别算法,核心板2上设置有音频输入/输出节点,传输模块3通过以太网光电、DSL、WIFI、模拟信号等方式传输信号,地面交互界面4包括数据存储模块41和管理APP42,数据存储模块41用于存储上传的报警记录等数据,管理APP42与现场控制器电性连接,现场控制器控制现场机器的运转情况,便于现场机器停机,防止出现意外或者造成财产损失,摄像机1、核心板2、传输模块3、地面交互界面4均设置于壳体5内,壳体5上设置有摄像头孔,摄像机1的摄像头内嵌在摄像头孔中,摄像机1采集视频流并进行压缩和编码,核心板2从摄像机1中提取视频流,而后进行图像处理,图像识别由图像处理模块21完成,在图像识别完成后,报警及联动输出信号由核心板2执行,在通信建立的情况下,将码流及报警控制信息转发,通过传输模块3传输给地面交互界面4,从而进行实时监控和报警信息、录像的存储;
如图3所示,图像处理模块21识别功能的实现基于神经网络算法,通过需求分析、样本采集、辅助学习+认知训练、识别效果、运行确认来实现:
需求分析:需求分析用于确认识别场景,同一摄像机1可识别多个不同场景,在对现场环境进行确认后进行下一步;
样本采集:即进行抓图,根据摄像机1的采样率,将视频流转换成逐帧的图片进行采集;
辅助学习+认知训练:通过工作人员进行人工筛选图片中的异物并通过特定功率的软件进行标注异物,然后将图片传输给摄像机1进行识别,辅助学习+认知训练时一个循环和持续的过程;
识别效果:识别效果的提升是一个循环上升的过程,随着图片基数积累的增加,识别效果逐步提升;
运行确认:在识别成功率大于95%时,即可投入使用;
如图4所示,在监测皮带运动时,摄像机1型号为KBA12S,用于高速运动的物体识别,其特定功能的实现需要搭配一字线红外激光发射器6,摄像机1监测皮带落煤点下方,并进行实时抓拍图片,录像,当皮带出现纵撕时,一字线红外激光发射器6的红外光透出,图像处理模块21将其识别,并通过传输模块3将报警控制信息传输至地面交互界面4,管理APP42通过控制器来控制现场皮带电机关停。
实施例二:
如图5所示,在监测皮带水煤时,摄像机1型号为KBA12S,其特定功能的实现需要搭配使用红外频闪灯7,红外频闪灯为频率10HZ、2ms的脉冲红外频闪,摄像机1实时记录皮带上运输煤的情况,当皮带上出现水煤时,核心板2上的图像处理模块21识别水煤,摄像机1抓拍水煤开始及结束时的图片,并录制水煤全段录像,生成报警记录,报警记录包含水煤开始的时间、结束时间、持续时长等信息,报警信息通过传输模块3传输至地面交互界面4。
实施例三:
在监测危险区域时,摄像机1型号为KBA12S(A),用于识别低速运动的物体,其特定功能的实现需要搭配使用语音系统,将摄像机1识别的区域进行划定,并设为危险区域,当有人员进入该危险区域时,核心板2上的图像处理模块21进行识别,并将抓拍图片、录像等信息生成报警记录,并将报警记录经传输模块3传输至地面交互界面4,同事语音系统工作,发出告警,让人员离开,控制器控制现场停机,防止人员闯入危险区而造成意外。
以上即为本发明的实施例内容,在未对本发明做出任何创造性的改进的前提下,皆属于本发明权利要求书保护范围内。
- 一种矿用本安型智能识别摄像仪
- 一种矿用本安型智能识别摄像仪