基于数据驱动的燃气轮机控制系统传感器故障诊断方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种火电厂故障诊断技术,特别涉及一种基于数据驱动的燃气轮机控制系统传感器故障诊断方法。
背景技术
燃气轮机在国家发电体系中具有非常重要的作用,其控制系统负责保证燃机的安全稳定运行。传感器作为控制系统中重要的测量元件,负责测量各种信号来监测燃气轮机的运行状态,并及时反馈给控制系统,当其发生故障时,可能会造成巨大的经济损失,甚至会造成人员伤亡,因此对燃气轮机控制系统传感器进行故障诊断很有必要。
常见的燃气轮机控制系统传感器的故障诊断方法主要分为基于解析模型的方法和基于数据驱动的方法。其中基于解析模型的方法需要对燃气轮机的控制系统进行准确的数学建模,然而燃气轮机控制系统是一种复杂的、非线性的动态系统,因此难以对其进行准确的建模来反映实时的系统状态。为此,本文采用基于数据驱动的方法来对燃气轮机控制系统传感器的故障进行诊断,基于数据驱动的方法只需要获得燃机运行时的过程数据即可进行故障诊断。
对燃气轮机控制系统传感器进行故障诊断,需要获得传感器的故障特征。WPT(小波包变换)一种常用的特征提取方法,它可以同时分解信号的低频和高频部分,能够很好地分析信号特征。
BPNN(反向传播神经网络)作为一种常用的基于数据驱动的方法,具有较强的非线性映射能力以及自学习能力,在故障诊断领域得到广泛的应用。然而,BPNN的性能会受到初始权值和阈值的影响,因此在使用BPNN之前,需要对其初始权值和阈值寻优。MFO(飞蛾扑火优化)算法作为一种智能寻优算法,具有结构简单、运行稳定等优点,近年来得到广泛关注和应用。
发明内容
针对燃气轮机控制系统传感器故障判断准确率问题,提出了一种基于数据驱动的燃气轮机控制系统传感器故障诊断方法,通过WPT提取传感器的故障特征,并利用MFO算法优化BPNN的初始权值和阈值,建立MFO-BPNN故障诊断模型,以提高诊断的正确率,为故障诊断工作提供了重要的决策支持。
本发明的技术方案为:一种基于数据驱动的燃气轮机控制系统传感器故障诊断方法,具体包括如下步骤:
1)对燃气轮机控制系统传感器正常信号引入偏差故障、漂移故障、冲击故障以及周期性干扰故障四种故障,构造传感器故障信号;
2)对传感器正常信号及故障信号进行归一化处理,利用小波包变换方法对燃气轮机控制系统传感器故障信号进行处理,通过计算小波包变换各个频段的能量占比构造故障特征向量;
3)利用等频离散化方法对提取的故障特征进行离散化处理,接着利用粗糙集理论对其进行属性约简,减少故障特征向量中故障特征的个数,获得故障特征样本集;
4)利用MFO算法优化BPNN的初始权值和阈值,建立MFO-BPNN故障诊断模型;
5)将步骤3)故障特征样本输入到MFO-BPNN诊断模型中进行训练,并保存训练好的最优模型;
6)将待诊断传感器信号同样进行离散化处理和属性约简,并输入到步骤5)保存的最优模型中,得到诊断结果。
进一步,所述步骤1)传感器故障信号如下表:
表中定义:当t
进一步,所述步骤4)MFO算法优化BPNN的具体步骤如下:
4.1)MFO算法初始化:设置最大迭代次数,飞蛾种群规模,最大火焰数flame.max参数,并利用佳点集理论初始化飞蛾种群位置,飞蛾种群位置表示待优化的BPNN的初始权值和阈值;
4.2)采用K折交叉验证的方法,将BPNN的分类误差作为适应度函数,适应度函数为:
式中:N为样本总数;L为输出层神经元数目;O
4.3)待求变量初始化,在搜索空间中基于佳点集理论生成飞蛾位置,并计算每只飞蛾的适应度值;
4.4)将飞蛾适应度值排序并按顺序将飞蛾位置赋值给第一代火焰;
4.5)更新当前飞蛾的位置,飞蛾位置更新公式为:
M
式中,M
4.6)如果任何一个飞蛾适应度值由于对应的火焰,则更新火焰位置;
4.7)自适应减少火焰的数量,火焰数量自适应减少机制表达式为:
式中,flame.no为保留的火焰数量;flame.max为最大火焰数;u为迭代次数;T为最大迭代次数;
4.8)判断是否达到最大迭代次数,若没达到,则返回(5)进入下一代,若达到,则执行下一步;
4.9)输出最优飞蛾种群位置,即为优化后BPNN的初始权值和阈值。
本发明的有益效果在于:本发明基于数据驱动的燃气轮机控制系统传感器故障诊断方法,能够快速的、准确的识别燃气轮机控制系统传感器故障类型,及时进行维修和保护,降低燃气轮机控制系统传感器故障带来的经济损失,使燃气轮机能够可靠安全的运行。
附图说明
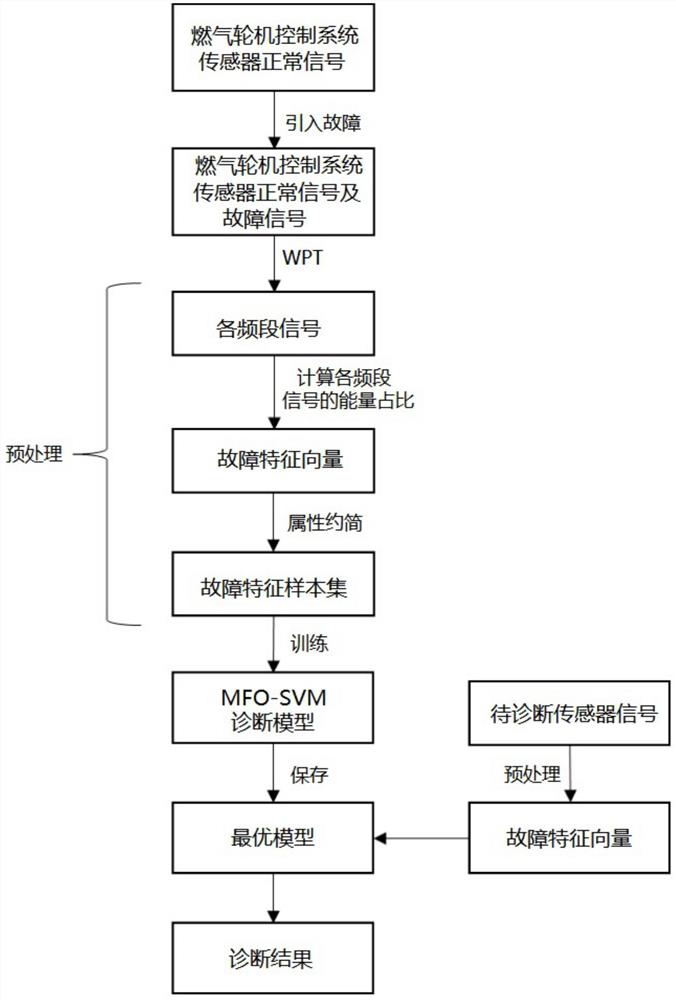
图1为本发明燃气轮机控制系统传感器故障诊断方法流程图;
图2为本发明中MFO-SVM故障诊断模型建立示意图;
图3为本发明方法中MFO优化SVM参数流程图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1所示基于数据驱动的的燃气轮机控制系统传感器故障诊断方法流程图。对燃气轮机控制系统传感器正常信号引入偏差故障、漂移故障、冲击故障以及周期性干扰故障四种故障,构造传感器故障信号,利用WPT方法对构造传感器故障信号进行处理,得到重构后的各个频段信号,通过计算各个频段信号的能量占比得到故障特征向量,利用等频离散化方法和粗糙集理论对故障特征向量进行属性约简,得到故障特征样本集。通过MFO算法对BPNN的初始权值和阈值进行优化,建立MFO-BPNN故障诊断模型,并将故障特征样本输入到诊断模型中训练,保存优化过程中得到的最优BPNN模型。将待诊断传感器信号经过离散化和属性约见后输入到最优SVM模型中,即可得到诊断结果,完成对燃气轮机控制系统传感器故障类型的识别。具体流程如图2所示。
该故障诊断方法具体包括以下步骤:
S1、对燃气轮机控制系统传感器正常信号引入偏差故障、漂移故障、冲击故障以及周期性干扰故障四种故障,构造传感器故障信号。四种故障类型的数学表达如表1所示。
表1
表中定义:当t
S2、对传感器正常信号及故障信号进行归一化处理,利用WPT方法对燃气轮机控制系统传感器故障信号进行处理,通过计算小波包变换各个频段的能量占比即可构造故障特征向量。获取故障特征向量的具体步骤如下:
(1)对传感器故障信号进行小波包分解:
对分解信号进行重构:
(2)计算小波包变换得到的各个频段的能量:
式中,
(3)计算小波包变换各个频段的能量占比即可构造故障特征向量:
式中,E
S3、利用等频离散化方法对提取的故障特征进行离散化处理,接着利用粗糙集理论对其进行属性约简,减少故障特征向量中故障特征的个数。
S4、利用佳点集理论初始化MFO算法中的飞蛾种群位置,并利用MFO算法优化BPNN的初始权值和阈值,建立MFO-BPNN故障诊断模型。BP神经网络的网络结构如图3所示,BP神经网络通过正向传播过程将诊断输出结果与实际故障类型对比,如大于设定的误差则转入反向传播过程修正各层的权值和阈值。MFO算法优化BPNN的具体步骤如下:
(1)MFO算法初始化:设置最大迭代次数T,飞蛾种群规模c,最大火焰数flame.max等参数,并利用佳点集理论初始化飞蛾种群位置,飞蛾种群位置表示待优化参数。
(2)采用K折交叉验证的方法,将BPNN的分类误差作为适应度函数,适应度函数为:
式中:N为样本总数;L为输出层神经元数目;O
(3)待求变量初始化,在搜索空间中基于佳点集理论生成飞蛾位置,并计算每只飞蛾的适应度值。
(4)将飞蛾适应度值排序并按顺序将飞蛾位置赋值给第一代火焰。
(5)更新当前飞蛾的位置,飞蛾位置更新公式为:
M
式中,M
(6)如果任何一个飞蛾适应度值由于对应的火焰,则更新火焰位置。
(7)自适应减少火焰的数量,火焰数量自适应减少机制表达式为:
式中,flame.no为保留的火焰数量;flame.max为最大火焰数;u为迭代次数;T为最大迭代次数。
(8)判断是否达到最大迭代次数,若没达到,则返回(5)进入下一代,若达到,则执行下一步。
(9)输出优化结果。
S5、将故障特征样本输入到MFO-BPNN诊断模型中进行训练,并保存训练好的最优模型。
S6、将待诊断传感器信号同样进行离散化处理和属性约简,并输入到保存的最优模型中,得到诊断结果。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 基于数据驱动的燃气轮机控制系统传感器故障诊断方法
- 基于MFO-SVM的燃气轮机传感器故障诊断方法