车体振动时对接触轨检测数据的动态补偿方法及系统
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及车辆检测技术领域,具体涉及一种车体振动时对接触轨检测数据的动态补偿方法及系统。
背景技术
随着我国城市化建设快速发展,城市人口急剧增加,交通拥堵日益严重,地铁凭借着它的快速、安全、载客量大等优势,成为了解决城市交通拥挤的主要工具。随着载客量越来越大,车辆的行车密度也跟着提升,这对列车的供电性能要求也越来越高,而列车的供电性能直接影响地铁列车的安全性能,其同时也是地铁供电部门维修工作计划基本参数的制定依据。
地铁供电主要分为接触网供电和接触轨供电两种方式,现有技术中大都采用接触网进行供电,所以对接触网相关的研究比较多,而对于地铁接触轨(也称三轨)的检测方法的相关研究相对较少。实际应用中,必须定期对接触轨的导高(即第三轨的底面与轨道面的距离)和拉出值(即第三轨的中心与同边轨道内侧面的距离)进行测量,掌握接触轨和轨道的相对位置关系,从而进行调整,以保证列车在运行过程中与第三轨在合适的位置上,从而确保供电系统的正常。
在第三轨检测相关技术要求和规范中有明确的的规定:每季度对第三轨几何参数检测不能够少于2次。对于当前城市轨道交通越来越严重的检测任务来说,传统的依靠人工的三轨检测方法已经不能满足要求。这些依靠人工的检测方法自动化程度低,而且在检测时容易受人为因素的干扰,导致检测精度的降低。因此,对于第三轨的检测急需一种高效、高精度、高可靠性的检测方法。
运行中的双轨检测车是具有多自由度的振动系统,由于线路存在的各种随机不平顺,使车辆产生振动,车体振动将直接影响检测数据的准确性,如果不进行补偿计算,就会产生较大的误差,特别是检测车产生上下垂直振动、水平左右摆动及侧滚时,会对数据产生直接影响,导致结果错误。
传统方法采用拉线式位移传感器、电容式位移传感器进行车体振动补偿以及基于图像处理的振动补偿方法,其中:
拉线位移传感器方式是将拉线传感器安装在转向架上,拉线缚在车体上,通过测量拉绳与移动距离成正比例的电信号,得到车体相对于转向架的振动偏移。然而,由于拉线传感器采用接触式测量方式,存在机械磨损,不适合长期使用。
电容位移传感器方式将一块板极固定于车体,另一块固定在轴箱,根据平行板电容器的电容量与板间距离呈反比关系,而电容量的测量可通过LC振荡器频率获得进行偏移补偿。将该方法应用于接触轨拉出值检测中,拉出值误差绝对值的平均值由34.41mm减小到13.74mm,补偿效果明显,但精度仍不能满足精确测量的要求。
相较于以上两种振动补偿方式,采用图像处理进行振动补偿避免了因分步计算车体相对于转向架的振动偏移,轮轨之间的振动偏移进行叠加产生的累积误差,精度较高,但无法满足实时性,对硬件要求较高。
相关技术中,“基于图像处理的振动补偿方法在接触轨检测中的应用,郑锐等,《城市轨道交通研究》”中,通过布置三个传感器分别对接触轨和两个走行轨进行测量,实现对走行轨的振动补偿,而且采样间隔比较大,20km/h的采样间隔高达92.5mm,采样帧率为60帧每秒,无法满足实时性的要求,且随着检测车速度的提高,采样间隔会越来越大,有可能会漏掉一些异常数据。
“基于结构光测量技术的接触轨检测方法研究,杨柳,铁路运输工程科技Ⅱ辑”中仅在接触轨上设置传感器,用于进行接触轨的参数检测而不是补偿。
“基于计算机视觉的接触轨检测车振动补偿方法及应用,占栋等,《铁路学报》”中对接触轨检测数据的补偿只涉及水平方向和垂直方向的位移补偿,但未进行角度的补偿,接触轨检测数据的补偿结果并不准确。
公布号为CN107401979A的中国发明专利申请文献公布了一种用于接触网检测的车体振动位移补偿装置及方法,所述装置以检测车为搭载平台,具体包含:激光测量单元安装于检测车的车底,用于获取检测车左右钢轨的二维位移数据;位置确定模块、补偿参数确定模块、几何参数确定模块分别安装于检测车内部,位置确定模块用于根据二维位移数据计算获得左右钢轨相对激光测量单元的垂向位移和横向位移;补偿参数确定模块用于根据垂向位移和横向位移计算获得检测车相对于左右钢轨的车体振动位移补偿参数;几何参数确定模块用于获取的接触网几何参数测量值,并根据接触网几何参数测量值与车体振动位移补偿参数测量值,计算获得检测车相对于轨平面的接触网几何参数测量值。
该方案用于计算接触网的几何参数,而非计算接触轨的几何参数,接触网位于走行轨的上方,而接触轨位于走行轨的侧面;且激光测量单元安装于检测车的车底,所采集的数据仅为走行轨的数据,激光测量单元安装角度固定为30或45度,通过分别相对左、右走行轨的垂向位移计算获得动态侧倾角度,动态补偿误差较大。
发明内容
本发明所要解决的技术问题在于解决车体振动时对接触轨检测数据进行实时补偿校正,从而满足接触轨几何参数的检测精度。
本发明通过以下技术手段实现解决上述技术问题的:
本发明提出了一种车体振动时对接触轨检测数据的动态补偿方法,在检测车同一侧面安装第一激光轮廓仪和第二激光轮廓仪,所述方法包括:
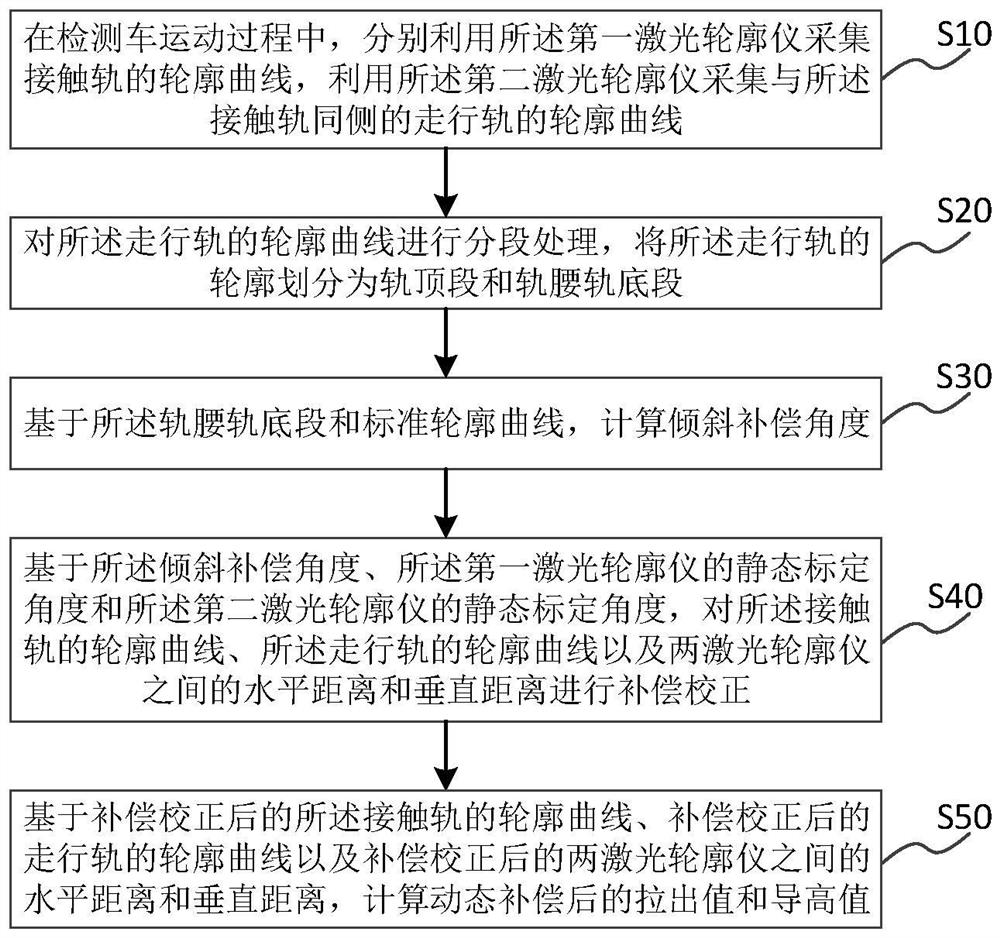
在检测车运动过程中,分别利用所述第一激光轮廓仪采集接触轨的轮廓曲线,利用所述第二激光轮廓仪采集与所述接触轨同侧的走行轨的轮廓曲线;
对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段;
基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度;
基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正;
基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值。
本发明通过对与接触轨同一侧走行轨轮廓与标准轮廓之间的配准获取倾斜补偿角度,并利用倾斜补偿角度对接触轨的轮廓、走行轨的轮廓以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,对动态时车体振动可能产生的偏差进行数据补偿,从而计算动态补偿后的拉出值和导高值;本方案不仅对水平方向和垂直方向的位移补偿,还对角度的补偿,使得接触轨检测数据的补偿结果更加准确。
进一步地,所述对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段,包括:
对于所述走行轨的轮廓曲线上的每个点,计算其他点与当前点之间的距离,若以当前点为原点,第一设定值为圆半径,若该圆半径范围内只有一个点,则该点为噪声点并进行去除;
在一个范围内相近两点之间的距离都小于第二设定值时,将该范围内的所有点划分为同一曲线段,以将所述走行轨的轮廓划分为轨顶段和轨腰轨底段。
进一步地,所述基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度,包括:
根据第一圆半径范围和第二圆半径范围,分别对应提取所述轨腰轨底段的两部分特征点集和所述标准轮廓曲线的两部分特征点集;
对所述腰轨底段的两部分特征点集分别拟合,确定一组圆心位置A
使用匹配算法对两组圆心位置进行迭代配准,计算倾斜补偿角度θ。
进一步地,所述基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,包括:
根据所述倾斜补偿角度和所述第一激光轮廓仪的静态标定角度,将所述接触轨的实时角度校正为:β1=α1+θ,θ为所述倾斜补偿角度,α1为所述第一激光轮廓仪的静态标定角度;
根据所述倾斜补偿角度和所述第二激光轮廓仪的静态标定角度,将所述走行轨的实时角度校正为:β2=θ+α2,α2为所述第二激光轮廓仪的静态标定角度;
基于所述角度β1和β2,分别对所述走行轨的轮廓曲线和所述接触轨的轮廓曲线进行补偿校正,得到补偿校正后的所述走行轨的轮廓曲线和补偿校正后的所述接触轨的轮廓曲线;
基于所述倾斜补偿角度,对所述第一激光轮廓仪和所述第二激光轮廓仪之间的水平距离L0和垂直距离H0进行补偿校正为:
L=S*cosα’,H=S*sinα’
式中:S为所述第一激光轮廓仪和所述第二激光轮廓仪之间的直线距离,S
进一步地,所述基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值,包括:
根据补偿校正后的所述接触轨的轮廓曲线和补偿校正后的所述走行轨的轮廓曲线,提取导高拉出值的特征点坐标;
根据所述导高拉出值的特征点坐标及补偿校正后两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值a’和导高值b’具体为:
a’=L+x’
b’=y
式中:x
进一步地,所述根据补偿校正后的所述接触轨的轮廓曲线和补偿校正后的所述走行轨的轮廓曲线,提取导高拉出值的特征点坐标,包括:
计算补偿校正后所述接触轨的轮廓曲线上任意两点连线的斜率,并基于斜率的变化确定拐点;
根据所述拐点与所述接触轨底部的中心点之间的距离,提取所述中心点的坐标作为轨底特征点的坐标;
对补偿校正后所述走行轨的轮廓曲线进行去噪处理后,以曲线的最高点作一水平线;
将所述水平线下移设定距离后,与所述走行轨的轮廓曲线的交点作为轨顶特征点,并提取该轨顶特征点的坐标。
进一步地,在所述在检测车运动过程中,分别利用所述第一激光轮廓仪采集接触轨的轮廓曲线,利用所述第二激光轮廓仪采集与所述接触轨同侧的走行轨的轮廓曲线之前,所述方法还包括:
对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度。
进一步地,所述对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,包括:
在所述检测车处于静止状态时,利用所述第一激光轮廓仪采集竖直面板的轮廓直线,利用所述第二激光轮廓仪采集所述走行轨的轮廓曲线,其中,所述竖直面板置于所述接触轨旁;
对静止状态下采集的所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓曲线划分为轨顶段和轨腰轨底段;
基于所述轨顶段,计算所述第二激光轮廓仪的静态标定角度;
对所述竖直面板的轮廓直线进行拟合,得到直线斜率,并将所述直线斜率转换为所述第一激光轮廓仪的静态标定角度。
进一步地,所述基于所述轨顶段,计算所述第二激光轮廓仪的静态标定角度,包括:
通过计算边缘点和多边形,逼近提取所述轨顶段的轨顶特征点;
设定距离阈值,以所述轨顶特征点和所述边缘点为基准,利用最近点算法计算所述轨顶特征点的位置,构建点云集合Q;
基于所述点云集合Q,在标准轮廓曲线对应的二维点云集合中查找对应的坐标点,构成点云集合P;
基于所述点云集合Q和所述点云集合P,采用匹配算法进行迭代配准,得到所述第二激光轮廓仪的静态标定角度。
进一步地,所述基于所述点云集合Q和所述点云集合P,采用匹配算法进行迭代配准,得到所述第二激光轮廓仪的静态标定角度,包括:
对所述点云集合Q和所述点云集合P进行归一化处理后,查找所述点云集合Q与所述点云集合P中对应的点对;
根据对应的点对,计算变换矩阵和平移向量:
T=P-Q*R
式中:
利用所述变换矩阵和所述平移向量更新点云数据;
在迭代损失小于设定阈值或达到最大迭代次数时,得到所述第二激光轮廓仪的静态标定角度。
进一步地,在对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度之后,所述方法还包括:
基于所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,计算两激光轮廓仪之间的水平距离与垂直距离。
进一步地,所述基于所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,计算两激光轮廓仪之间的水平距离与垂直距离,包括:
将所述检测车静止放于标准轨面上,使用仪器测量该状态下的导高值b和拉出值a;
分别利用所述第一激光轮廓仪和所述第二激光轮廓仪采集所述接触轨的轮廓曲线和所述走行轨的轮廓曲线;
基于所述第一激光轮廓仪的静态标定角度,将所述接触轨的轮廓曲线转换为以所述第一激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第一二维坐标系数据;
基于所述第二激光轮廓仪的静态标定角度,将所述走行轨的轮廓曲线转换为以所述第二激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第二二维坐标系数据;
基于所述导高值b和拉出值a,在所述第一二维坐标系数据和所述第二二维坐标系数据中分别查找对应特征点的坐标;
基于所述对应特征点的坐标,计算两激光轮廓仪之间的水平距离L0与垂直距离H0:
L0=a-x’+x
H0=y+y’-b
式中:x,y为从所述第一二维坐标系数据中查找到的特征点坐标;x’,y’为从所述第二二维坐标系数据中查找到的特征点坐标。
此外,本发明还提出了一种车体振动时对接触轨检测数据的动态补偿系统,所述系统包括:第一激光轮廓仪、第二激光轮廓仪和数据处理装置,所述第一激光轮廓仪和所述第二激光轮廓仪安装于检测车的同一侧面,所述第一激光轮廓仪和所述第二激光轮廓仪分别用于采集接触轨的轮廓曲线和与所述接触轨同侧的走行轨的轮廓曲线;
所述第一激光轮廓仪和所述第二激光轮廓仪均与所述数据处理装置连接,所述数据处理装置包括:
分段模块,用于对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段;
倾斜补偿角度计算模块,用于基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度;
补偿校正模块,用于基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正;
参数计算模块,用于基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值。
进一步地,所述第一激光轮廓仪和所述第二激光轮廓仪安装于刚性机械结构,所述刚性机械结构连接于双轨式钢轨超声波探伤仪。
本发明的优点在于:
(1)本发明通过对与接触轨同一侧走行轨轮廓与标准轮廓之间的配准获取倾斜补偿角度,并利用倾斜补偿角度对接触轨的轮廓、走行轨的轮廓以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,对动态时车体振动可能产生的偏差进行数据补偿,从而计算动态补偿后的拉出值和导高值;本方案不仅对水平方向和垂直方向的位移补偿,还对角度的补偿,使得接触轨检测数据的补偿结果更加准确。
(2)本发明中激光轮廓仪的安装角度不为预先固定值,而是通过后期进行标定测量,减少动态时的计算误差。
(3)本发明中将激光轮廓仪与双轨式超声波探伤仪相结合,实现对钢轨进行超声波检测的同时,对接触轨相对钢轨的位置关系进行检测,并且采样间隔小,每20km/h可达到40mm左右,可实现接触轨相对钢轨位置的高速测量;并且由于铁路安全要求的特殊性,对在钢轨上能进行动力行驶的装置必须有特殊要求,而双轨式钢轨超声波探伤仪满足这些要求,被允许在铁路上运用自身动力进行行走。
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
图1是本发明一实施例提出的一种车体振动时对接触轨检测数据的动态补偿方法的流程示意图;
图2是本发明一实施例中动态补偿整体流程示意图;
图3是本发明一实施例中60轨的轮廓示意图;
图4是本发明一实施例中步骤S1的细分流程示意图;
图5是本发明一实施例中角度标定流程示意图;
图6是本发明一实施例中步骤S2的细分流程示意图;
图7是本发明一实施例中两激光轮廓仪之间的水平距离与垂直距离的计算流程示意图;
图8是本发明一实施例提出的一种车体振动时对接触轨检测数据的动态补偿系统的结构示意图;
图9是本发明一实施例中激光轮廓仪的安装结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至图2所示,本发明第一实施例提出了一种车体振动时对接触轨检测数据的动态补偿方法,在检测车同一侧面安装第一激光轮廓仪和第二激光轮廓仪,所述方法包括以下步骤:
S10、在检测车运动过程中,分别利用所述第一激光轮廓仪采集接触轨的轮廓曲线,利用所述第二激光轮廓仪采集与所述接触轨同侧的走行轨的轮廓曲线;
需要说明的是,第一激轮廓仪用于从下向上采集接触轨的轮廓曲线,第二激光轮廓仪用于从上向下采集与接触轨同侧的走行轨的轮廓曲线,第一激光轮廓仪和第二激光轮廓仪安装于检测车上,且检测车可在钢轨上移动。
S20、对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段;
需要说明的是,走行轨的轮廓包括三部分,轨顶、轨腰和轨底,本实施例中将走形的轮廓划分为轨顶段和轨腰轨底段共两段。
S30、基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度;
需要说明的是,在小车移动过程中,两侧相对钢轨的高度会发生变化,无法使用车体作为参考确定钢轨轨道平面,从而导致测量导高值错误,本实施例通过计算小车相对于走行轨的倾斜补偿角度作为补偿角度,从而对动态时车体振动可能产生的偏差进行数据补偿。
S40、基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正;
S50、基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值。
本实施例通过对与接触轨同一侧走行轨轮廓与标准轮廓之间的配准获取倾斜补偿角度,并利用倾斜补偿角度对接触轨的轮廓、走行轨的轮廓以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,对动态时车体振动可能产生的偏差进行数据补偿,从而计算动态补偿后的拉出值和导高值;本方案不仅对水平方向和垂直方向的位移补偿,还对角度的补偿,使得接触轨检测数据的补偿结果更加精确,动态下测量误差在3mm以内。
在一实施例中,所述步骤S20:对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段,具体包括以下步骤:
S21、对于所述走行轨的轮廓曲线上的每个点,计算其他点与当前点之间的距离,若以当前点为原点,第一设定值为圆半径,若该圆半径范围内只有一个点,则该点为噪声点并进行去除;
S22、在一个范围内相近两点之间的距离都小于第二设定值时,将该范围内的所有点划分为同一曲线段,以将所述走行轨的轮廓划分为轨顶段和轨腰轨底段。
需要说明的是,第一设定值可取值为2mm,第二设定值可取值为10mm,本实施例使用二维坐标系下坐标计算轮廓曲线上任两点距离和位置,通过计算当前点与最近点距离后,与设定圆半径2mm比较,如果该半径范围内只有一个点,则认为该点为噪点进行去除。
通过去除噪点,使得在查找特征点、拟合圆心、查找点集时去除干扰,如果一个范围内所有的相近两点之间的距离都小于设定值如10mm则该范围内的所有点为一段,通过该方法可以将整个轮廓曲线分为两段。
需要说明的是,本实施例采用同样的方法可将接触轨的轮廓曲线划分为轨底段和侧面段两段。
在一实施例中,所述步骤S30:基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度,具体包括以下步骤:
S31、根据第一圆半径范围和第二圆半径范围,分别对应提取所述轨腰轨底段的两部分特征点集和所述标准轮廓曲线的两部分特征点集;
需要说明的是,对于走行轨而言,轨底轨腰不会产生磨耗,所以根据圆半径范围提取该轨底轨腰段的特征点集。
需要说明的是,如图3所示,第一圆半径范围和第二圆半径范围分别为国标下的60轨里的半径为400mm和半径为20mm的两部分圆弧,标准轮廓曲线指的是国标下的60轨的轮廓曲线。
S32、对所述腰轨底段的两部分特征点集分别拟合,确定一组圆心位置A
需要说明的是,本实施例具体采用最小二乘法拟合两部分特征点集,确定一组圆心位置A
S33、使用匹配算法对两组圆心位置进行迭代配准,计算倾斜补偿角度θ。
需要说明的是,本实施例具体采用ICP算法(Iterative Closest Point)对两组圆心位置进行迭代配准,通过计算出的实时倾斜角度β2减去静态标定角度α2,从而求出倾斜补偿角度θ:θ=β2-α2。
在一实施例中,所述步骤S40:基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,具体包括以下步骤:
S41、根据所述倾斜补偿角度和所述第一激光轮廓仪的静态标定角度,将所述接触轨的实时角度校正为:β1=α1+θ,θ为所述倾斜补偿角度,α1为所述第一激光轮廓仪的静态标定角度;
S42、根据所述倾斜补偿角度和所述第二激光轮廓仪的静态标定角度,将所述走行轨的实时角度校正为:β2=α2+θ,α2为所述第二激光轮廓仪的静态标定角度;
需要说明的是,第一激光轮廓仪的静态标定角度和第二激光轮廓仪的静态标定角度分别为在小车静止时进行预先标定得到。
S43、基于所述角度β2和β1,分别对所述走行轨的轮廓曲线和所述接触轨的轮廓曲线进行补偿校正,得到补偿校正后的所述走行轨的轮廓曲线和补偿校正后的所述接触轨的轮廓曲线;
需要说明的是,接触轨与走行轨轮廓数据校正的过程将原走行轨的轮廓曲线和接触轨的轮廓曲线分别乘以各自的旋转矩阵R2、R1,得到补偿校正后的所述走行轨的轮廓曲线和补偿校正后的所述接触轨的轮廓曲线为:
Q1=Q*R1,Q2=Q’*R2,Q、Q’为原接触轨的轮廓曲线和走行轨的轮廓曲线对应的点集,Q1、Q2为校正后的轮廓曲线对应的点集。
S44、基于所述倾斜补偿角度,对所述第一激光轮廓仪和所述第二激光轮廓仪之间的水平距离L0和垂直距离H0进行补偿校正为:
L=S*cosα’,H=S*sinα’
式中:S为所述第一激光轮廓仪和所述第二激光轮廓仪之间的直线距离,S
需要说明的是,两激光轮廓仪之间的水平距离和垂直距离为基于两激光轮廓仪的静态标定角度预先计算得到,
在一实施例中,所述步骤S50:基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值,具体包括以下步骤:
S51、根据补偿校正后的所述接触轨的轮廓曲线和补偿校正后的所述走行轨的轮廓曲线,提取导高拉出值的特征点坐标;
S52、根据所述导高拉出值的特征点坐标及补偿校正后两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值a’和导高值b’具体为:
a’=L+x’
b’=y
式中:x
需要说明的是,本实施例通过半径滤波的方式去除了影响结果的噪点,去除在查找特征点、拟合圆心、查找点集时的干扰;并使用测量值进行静态标定计算使得设备之间的相对位置关系和角度更为准确,动态补偿时不仅考虑到水平和竖直方向的平移,而且增加了侧倾角度的补偿,使结果更加准确。
在一实施例中,所述步骤S51:根据补偿校正后的所述接触轨的轮廓曲线和补偿校正后的所述走行轨的轮廓曲线,提取导高拉出值的特征点坐标,具体包括以下步骤:
S511、计算补偿校正后所述接触轨的轮廓曲线上任意两点连线的斜率,并基于斜率的变化确定拐点;
S512、根据所述拐点与所述接触轨底部的中心点之间的距离,提取所述中心点的坐标作为轨底特征点的坐标;
S513、对补偿校正后所述走行轨的轮廓曲线进行去噪处理后,以曲线的最高点作一水平线;
S514、将所述水平线下移设定距离后,与所述走行轨的轮廓曲线的交点作为轨顶特征点,并提取该轨顶特征点的坐标。
需要说明的是,接触轨轮廓曲线的特征点为轨底部中心点,接触轨的轮廓曲线在接触轨的边缘存在曲率发生明显变化的拐点,可根据两点之间连线的斜率与直线的斜率比较,作为拐点的判别依据,然后通过中心点与拐点的距离计算提取中心点的坐标。
走行轨根据校正后的轮廓去除噪点后,获取最高点的y值,以该点作一水平线,下移16mm,该水平线与轮廓的交点即为走行轨轮廓曲线的特征点。
在一实施例中,在所述步骤S10:在检测车运动过程中,分别利用所述第一激光轮廓仪采集接触轨的轮廓曲线,利用所述第二激光轮廓仪采集与所述接触轨同侧的走行轨的轮廓曲线之前,所述方法还包括以下步骤:
S1、对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度。
在一实施例中,如图4至图5所示,所述步骤S1:对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,具体包括以下步骤:
S101、在所述检测车处于静止状态时,利用所述第一激光轮廓仪采集竖直面板的轮廓直线,利用所述第二激光轮廓仪采集所述走行轨的轮廓曲线,其中,所述竖直面板置于所述接触轨旁;
S102、对静止状态下采集的所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓曲线划分为轨顶段和轨腰轨底段;
需要说明的是,轮廓曲线的划分过程与上述步骤S20相同,该处不再赘述。
S103、基于所述轨顶段,计算所述第二激光轮廓仪的静态标定角度;
S104、对所述竖直面板的轮廓直线进行拟合,得到直线斜率,并将所述直线斜率转换为所述第一激光轮廓仪的静态标定角度。
需要说明的是,本实施例在接触轨旁边设置一个面板竖直,该竖直面板的位置与接触轨位置接近,利用第一激光轮廓仪采集竖直面板的轮廓为一条直线,采用最小二乘法拟合直线的斜率,再斜率转换成角度即为第一激光轮廓仪的静态标定角度。
本实施例中激光轮廓仪的安装角度不为预先固定值,而是通过后期进行标定测量,减少动态时的计算误差。
在一实施例中,所述步骤S103:基于所述轨顶段,计算所述第二激光轮廓仪的静态标定角度,具体包括以下步骤:
S131、通过计算边缘点和多边形,逼近提取所述轨顶段的轨顶特征点;
具体地,在走行轨的轮廓曲线分段后,取轨顶段,并根据位置关系计算边缘点,边缘点特征是本范围内坐标x值最大,y值最小,x为横向,y为垂向;然后使用道格拉斯-普克多边形逼近算法(阈值ε=0.6),首先在轮廓曲线首尾两点A、B之间连接一条直线A B得到曲线上离该直线距离最大的点C,计算其与AB的距离d,比较d与ε的大小,如果距离大于阈值,那么再在点C处将当前轮廓分为两段,然后重复以上过程,直到最后所有的线段都满足最大距离约束(d<ε),最后找到最长的线段即钢轨轮廓曲线中的直线部分,取直线两侧的端点坐标,作为轨顶特征点;最后将边缘点和多边形逼近计算的轨顶特征点都作为起始特征点构建点云集合。
S132、设定距离阈值,以所述轨顶特征点和所述边缘点为基准,利用最近点算法计算所述轨顶特征点的位置,构建点云集合Q;
具体地,构建点云集合Q的步骤为:
(1)对整个轮廓曲线的轮廓点在x方向上由小到大排序;
(2)确定轨顶特征点坐标和位置,以轨顶特征点作为起点记为q1;
(3)根据q1对整个轮廓进行前后两个方向上的遍历;
(4)向后查找距离q1点3mm的最近点记为q2,以q2为起点接着向后查找,获取与q1点距离3mm的最近点q3;向前查找同理;
(5)直到整个轮廓遍历结束或者遇到另一轨顶特征点以该轨顶特征点为起点;
(6)集合所有的点q1、q2、q3……,获得该轮廓下的点云集合Q。
需要说明的是,本实施例以提取的轨顶特征点作为基准,分别按照间隔3mm的距离取点,获取该状态下的点云集合Q,3mm的阈值获取的点云数量会比较稀疏,使得后面计算速度快。
S133、基于所述点云集合Q,在标准轮廓曲线对应的二维点云集合中查找对应的坐标点,构成点云集合P;
需要说明的是,这里的标准轮廓曲线指的国标下的60轨的轮廓曲线,如图3所示,标准轮廓曲线以轨底中心为原点,右侧为x正向,上方为y正向下的二维轮廓。
本实施例通过在标准轮廓去下中查找对应的轨顶特征点,使得标准轮廓与测量轮廓的特征点已经对齐,使得下一步ICP算法中可节约大量的计算时间。
S134、基于所述点云集合Q和所述点云集合P,采用匹配算法进行迭代配准,得到所述第二激光轮廓仪的静态标定角度。
在一实施例中,所述步骤S134:基于所述点云集合Q和所述点云集合P,采用匹配算法进行迭代配准,得到所述第二激光轮廓仪的静态标定角度,具体包括以下步骤:
对所述点云集合Q和所述点云集合P进行归一化处理后,查找所述点云集合Q与所述点云集合P中对应的点对;
根据对应的点对,计算变换矩阵和平移向量:
T=P-Q*R
式中:
利用所述变换矩阵和所述平移向量更新点云数据;
在迭代损失小于设定阈值或达到最大迭代次数时,得到所述第二激光轮廓仪的静态标定角度。
需要说明的是,本实施例中迭代损失为对应点对(最近点)的距离之和。
应当理解的是,倾斜补偿角度θ的计算过程与此类似。
在一实施例中,在所述步骤S1:对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度之后,所述方法还包括:
S2:基于所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,计算两激光轮廓仪之间的水平距离与垂直距离。
在一是实施例中,如图6至图7所示,所述步骤S2:基于所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,计算两激光轮廓仪之间的水平距离与垂直距离,包括以下步骤:
S201、将所述检测车静止放于标准轨面上,使用仪器测量该状态下的导高值b和拉出值a;
需要说明的是,这里的仪器采用的是地铁中专门用来测量接触轨的道尺。
S202、分别利用所述第一激光轮廓仪和所述第二激光轮廓仪采集所述接触轨的轮廓曲线和所述走行轨的轮廓曲线;
S203、基于所述第一激光轮廓仪的静态标定角度,将所述接触轨的轮廓曲线转换为以所述第一激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第一二维坐标系数据;
S204、基于所述第二激光轮廓仪的静态标定角度,将所述走行轨的轮廓曲线转换为以所述第二激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第二二维坐标系数据;
S205、基于所述导高值b和拉出值a,在所述第一二维坐标系数据和所述第二二维坐标系数据中分别查找对应特征点的坐标;
S206、基于所述对应特征点的坐标,计算两激光轮廓仪之间的水平距离L0与垂直距离H0:
L0=a-x’+x
H0=y+y’-b
式中:x,y为从所述第一二维坐标系数据中查找到的特征点坐标;x’,y’为从所述第二二维坐标系数据中查找到的特征点坐标。
需要说明的是,由于激光轮廓仪出射点在设备内部,两激光轮廓仪的水平距离和垂直距离无法通过测量仪器直接获取,本实施例通过采集的数据计算可准确获取两激光轮廓仪的水平距离和垂直距离。
本实施例提出的动态补偿方法仅仅涉及到二维点云的矩阵变换和相关坐标点的查找计算,解决车体振动时对接触轨检测数据进行实时补偿校正,最终结果不但精度高而且实时性极佳,检测车工作速度可达15km/h,动态补偿精度控制在3mm内,每秒可实时处理100帧,从而满足接触轨几何参数的检测精度和速度。
此外,如图8所示,本发明第二实施例提出了一种车体振动时对接触轨检测数据的动态补偿系统,所述系统包括:第一激光轮廓仪10、第二激光轮廓仪20和数据处理装置30,所述第一激光轮廓仪10和所述第二激光轮廓仪20安装于检测车的同一侧面,所述第一激光轮廓仪10和所述第二激光轮廓仪20分别用于采集接触轨的轮廓曲线和与所述接触轨同侧的走行轨的轮廓曲线;
所述第一激光轮廓仪10和所述第二激光轮廓仪20均与所述数据处理装置30连接,所述数据处理装置30包括:
分段模块31,用于对所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓划分为轨顶段和轨腰轨底段;
倾斜补偿角度计算模块32,用于基于所述轨腰轨底段和标准轮廓曲线,计算倾斜补偿角度;
补偿校正模块33,用于基于所述倾斜补偿角度、所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,对所述接触轨的轮廓曲线、所述走行轨的轮廓曲线以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正;
参数计算模块34,用于基于补偿校正后的所述接触轨的轮廓曲线、补偿校正后的所述走行轨的轮廓曲线以及补偿校正后的两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值和导高值。
本实施例通过对与接触轨同一侧走行轨轮廓与标准轮廓之间的配准获取倾斜补偿角度,并利用倾斜补偿角度对接触轨的轮廓、走行轨的轮廓以及两激光轮廓仪之间的水平距离和垂直距离进行补偿校正,对动态时车体振动可能产生的偏差进行数据补偿,从而计算动态补偿后的拉出值和导高值;本方案不仅对水平方向和垂直方向的位移补偿,还对角度的补偿,使得接触轨检测数据的补偿结果更加精确,动态下测量误差在3mm以内。
在一实施例中,所述倾斜补偿角度计算模块32,包括:
特征点提取单元,用于根据第一圆半径范围和第二圆半径范围,分别对应提取所述轨腰轨底段的两部分特征点集和所述标准轮廓曲线的两部分特征点集;
拟合单元,用于对所述腰轨底段的两部分特征点集分别拟合,确定一组圆心位置A
角度计算单元,用于使用匹配算法对两组圆心位置进行迭代配准,计算倾斜补偿角度θ。
在一实施例中,所述补偿校正模块33,包括:
第一静态标定角度计算单元,用于根据所述倾斜补偿角度和所述第一激光轮廓仪的静态标定角度,将所述接触轨的实时角度校正为:β1=α1+θ,θ为所述倾斜补偿角度,α1为所述第一激光轮廓仪的静态标定角度;
第二静态标定角度计算单元,用于根据所述倾斜补偿角度和所述第二激光轮廓仪的静态标定角度,将所述走行轨的实时角度校正为:β2=θ+α2,α2为所述第二激光轮廓仪的静态标定角度;
需要说明的是,第一激光轮廓仪的静态标定角度和第二激光轮廓仪的静态标定角度分别为在小车静止时进行预先标定得到。
补偿校正单元,用于基于所述角度β2和β1,分别对所述走行轨的轮廓曲线和所述接触轨的轮廓曲线进行补偿校正,得到补偿校正后的所述走行轨的轮廓曲线和补偿校正后的所述接触轨的轮廓曲线;
需要说明的是,接触轨与走行轨轮廓数据校正的过程将原走行轨的轮廓曲线和接触轨的轮廓曲线分别乘以各自的旋转矩阵R2、R1,得到补偿校正后的所述走行轨的轮廓曲线和补偿校正后的所述接触轨的轮廓曲线为:
距离补偿校正单元,用于基于所述倾斜补偿角度,对所述第一激光轮廓仪和所述第二激光轮廓仪之间的水平距离L0和垂直距离H0进行补偿校正为:
L=S*cosα’,H=S*sinα’
式中:S为所述第一激光轮廓仪和所述第二激光轮廓仪之间的直线距离,S
在一实施例中,所述参数计算模块34,包括:
特征点坐标计算单元,用于根据补偿校正后的所述接触轨的轮廓曲线和补偿校正后的所述走行轨的轮廓曲线,提取导高拉出值的特征点坐标;
拉出导高值计算单元,用于根据所述导高拉出值的特征点坐标及补偿校正后两激光轮廓仪之间的水平距离和垂直距离,计算动态补偿后的拉出值a’和导高值b’具体为:
a’=L+x’
b’=y
式中:x
在一实施例中,所述特征点坐标计算单元,具体用于执行以下步骤:
计算补偿校正后所述接触轨的轮廓曲线上任意两点连线的斜率,并基于斜率的变化确定拐点;
根据所述拐点与所述接触轨底部的中心点之间的距离,提取所述中心点的坐标作为轨底特征点的坐标;
对补偿校正后所述走行轨的轮廓曲线进行去噪处理后,以曲线的最高点作一水平线;
将所述水平线下移设定距离后,与所述走行轨的轮廓曲线的交点作为轨顶特征点,并提取该轨顶特征点的坐标。
在一实施例中,所述数据处理装置30还包括角度标定模块,用于对所述第一激光轮廓仪和所述第二激光轮廓仪进行标定,确定所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度。
所述角度标定模块具体包括:
静态轮廓采集单元,用于在所述检测车处于静止状态时,利用所述第一激光轮廓仪采集竖直面板的轮廓直线,利用所述第二激光轮廓仪采集所述走行轨的轮廓曲线,其中,所述竖直面板置于所述接触轨旁;
分段单元,用于对静止状态下采集的所述走行轨的轮廓曲线进行分段处理,将所述走行轨的轮廓曲线划分为轨顶段和轨腰轨底段;
需要说明的是,轮廓曲线的划分过程与上述步骤S20相同,该处不再赘述。
第一标定单元,用于基于所述轨顶段,计算所述第二激光轮廓仪的静态标定角度;
第二标定单元,用于对所述竖直面板的轮廓直线进行拟合,得到直线斜率,并将所述直线斜率转换为所述第一激光轮廓仪的静态标定角度。
在一实施例中,所述数据处理装置30还包括距离标定模块,用于基于所述第一激光轮廓仪的静态标定角度和所述第二激光轮廓仪的静态标定角度,计算两激光轮廓仪之间的水平距离与垂直距离。
具体地,所述距离标定模块,包括:
测量单元,用于将所述检测车静止放于标准轨面上,使用仪器测量该状态下的导高值b和拉出值a;
轮廓采集单元,用于分别利用所述第一激光轮廓仪和所述第二激光轮廓仪采集所述接触轨的轮廓曲线和所述走行轨的轮廓曲线;
第一转换单元,用于基于所述第一激光轮廓仪的静态标定角度,将所述接触轨的轮廓曲线转换为以所述第一激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第一二维坐标系数据;
第二转换单元,用于基于所述第二激光轮廓仪的静态标定角度,将所述走行轨的轮廓曲线转换为以所述第二激光轮廓仪的出射点为原点,以垂直于轨面的方向为y轴的第二二维坐标系数据;
查找单元,用于于所述导高值b和拉出值a,在所述第一二维坐标系数据和所述第二二维坐标系数据中分别查找对应特征点的坐标;
距离计算单元,用于基于所述对应特征点的坐标,计算两激光轮廓仪之间的水平距离L0与垂直距离H0:
L0=a-x’+x
H0=y+y’-b
式中:x,y为从所述第一二维坐标系数据中查找到的特征点坐标;x’,y’为从所述第二二维坐标系数据中查找到的特征点坐标。
在一实施例中,如图9所示,所述第一激光轮廓仪10和所述第二激光轮廓仪20安装于刚性机械结构40,所述刚性机械结构40连接于双轨式钢轨超声波探伤仪50。
需要说明的是,刚性机械结构40为铝型材拼接结构,整体重量轻,两激光轮廓仪安装于刚性机械结构可保持振动频率一致,安装方便,结构简单,可灵活调节设备位置,能够左右互换。
本实施例中将激光轮廓仪与双轨式超声波探伤仪相结合,实现对钢轨进行超声波检测的同时,对接触轨相对钢轨的位置关系进行检测,并且采样间隔小,每20km/h可达到40mm左右,可实现接触轨相对钢轨位置的高速测量;并且由于铁路安全要求的特殊性,对在钢轨上能进行动力行驶的装置必须有特殊要求,而双轨式钢轨超声波探伤仪满足这些要求,被允许在铁路上运用自身动力进行行走。
需要说明的是,本发明所述车体振动时对接触轨检测数据的动态补偿系统的其他实施例或具有实现方法可参照上述各方法实施例,此处不再赘余。
需要说明的是,在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,“计算机可读介质”可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(RAM),只读存储器(ROM),可擦除可编辑只读存储器(EPROM或闪速存储器),光纤装置,以及便携式光盘只读存储器(CDROM)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种用于接触网检测的车体振动位移补偿装置及方法
- 一种用于接触网检测的车体振动位移补偿装置及方法