一种仿生灵巧手
文献发布时间:2023-06-19 19:00:17
技术领域
本发明涉及仿生机器人技术领域,具体涉及一种仿生灵巧手。
背景技术
随着科技的发展,尤其是近十年以来机器人的应用领域在不断拓宽,已经从工业制造领域走向如医疗救治、智能家居、智慧出行、文创娱乐等社会生活的各个领域中。已有越来越多的类人型机器人以及机械手走近人们的日常生活。
机械手最初出现在工业机器人领域,以程序控制替代工人搬运、抓取、组装物料为主要表现形式的高科技自动化生产设备,其主要优势是可以重复做同一动作并且在正常情况下永远不会觉得累,仿生机械灵巧手作为人类活动肢体的延伸,被期望能够完成近似人的灵活、精细的抓取、抓握等操作,但由于受到诸如传动技术、传感系统、控制系统的技术限制,其在功能、仿生结构原理、运动特性等发展现状与人们期望及需求仍有一定差距。
申请号201680007659.7公布了“一种机器人灵巧手”以舵机驱动绳索牵引多手指屈曲,以达到人手的抓取动作,舵机的特点是集控制、驱动,动力、执行为一体的高度集成元器件,具有结构简单,易控制等优点,同时也有些不足之处是输出力矩过小,该专利公告的此款号称灵巧机器人手,在手掌处由于集成了5个舵机及绳索驱动机构显得过于臃肿和笨拙,而且其机械手与真人手的相似度相差过大,只能算是一个自动化产线上或设备上满足抓取功能的机械手,还谈不上灵巧。
申请号201910100172.9的国内专利公开了“一种机械手”,其公告的资料及模型显示其主要结构与真人手的结构形式基本相似,有5根手指,并且手指布局与真人手无较大差异,其公开的资料中描述其为步进电机加蜗轮蜗杆结构,驱动手指转动,实现手指屈曲完成抓取动作,其结构形式较复杂,在有限的空间内很难布局,因此其食指及中指共用一套驱动机构,无名指及小指共用一套驱动机构,大拇指用一套驱动机构,其基本能完成手部的捏取、抓握等动作,但其距真人的5指分别驱动仍有些功能欠缺。
申请号201810319044.9的国内专利公开了“一种机器人灵巧手”,其公告的资料及模型显示其主要结构与真人手的结构形式有类似的地方也有些差异的地方,具有5根手指,为了达到更可能大的抓握范围其将第四指第五指的转轴设置在手掌部位,其结果是达到了普通机械手无法达到的抓握范围。并且其驱动方式为每个指根关节一套电磁耦合机构通过给线圈加电产生电磁吸力再配合摩擦轮及腱绳驱动指根关节转动,断电后由复位弹簧驱使指根关节复位,其作关节动作通过在其指关节内部设置摩擦轮传动,将驱动指根关节转动的腱绳导引至末端指节处,保证末端指关节与指根关节近似同步驱动,其指根关节通过弹簧复位,其余指关节通过在指关节内部设置的弹性橡皮绳的张力复位,其手在实现功能的结果上强过一般机械灵巧手,但其传动过程太过复杂,并且对磁铁及线圈加电其安全性及稳定性存在隐患,并且其余指关节的使用的弹性复位元件为弹性橡皮筋,其而侯性极其差,使用一至两个月就会因氧化而腐烂,不仅需要更换,还不易清理。因此其为了在抓握能力上已经近似实现真手的抓握范围及功能,但其在实现的方式及过程略显薄弱并且智能化程度偏低,称为机器人灵巧手确实还有一些进步空间。
申请号201610520941.7国内发明专利公开了“一种仿生假肢手”其主要愿景是为了满足肢体残缺人士的日常生活中对手的功能需求而设计,并且其为了减轻重量采用3D打印材料及结构,最大限度的减轻了结构自身的重量,并且资料显示的仿生的5根手指也基本和真人的5指有点类似,其为了减轻重量,只做了满足手部抓握功能的拇指内旋外翻,其余四指由一个电机驱动同时屈曲和伸展,其工作原理为已公告的电机驱动牵引绳带动四指屈曲,由弹簧和弹性带也就是俗称橡皮筋相配合驱动手指被动伸展复位,弹性带的而侯性是其最大的安全隐患,其只能说是仅能满足一个手的最基本的抓握功能根据其公告的资料显示并未对其真人的其他仿生功能进行相关描述。
申请号201610566197.4国内专利公开了“一种仿生机械手”其公告的资料显示其主要结构为5个手指分别由5个气缸驱动多级连杆实现和手指一样的屈曲和伸展动作,气动驱动需要一套压缩空气制备、蓄能、驱动运动一整套系统,其便携性及产品的适用场景范围极其狭隘,根据其公告的结构图显示,其根本就还是停留在工业自动化领域还没进化完全的机械手,还远谈不上仿生型机械手。
综上,现有技术中的仿生手大多还由于技术原因、结构原因导致仿生形态无法达到要求,传动高效性、手指灵活性和抓取稳定性都欠佳。
发明内容
为了解决现有技术中的一个或多个技术问题,或至少提供一种有益的选择,本发明提供一种仿生灵巧手,简化传动结构,提高仿生的手指灵活性。
本发明公开的一种仿生灵巧手,包括手掌组件、仿生为拇指的主手指和与所述主手指配合抓取的多个辅助手指;
所述手掌组件包括手部基座和安装于所述手部基座的动力装置,所述主手指和辅助手指均包括依次相互铰接的前端指节、中间指节和末端指节;
所述动力装置包括驱动所述主手指移动的第一驱动装置和第二驱动装置,所述第一驱动装置传动连接摆动组件,所述第二驱动装置传动连接屈伸组件,所述屈伸组件铰接于所述摆动组件以在所述第二驱动装置的作用下沿铰接点转动,所述主手指的末端指节铰接于所述屈伸组件,且所述屈伸组件通过第一连杆传动铰接所述主手指的中间指节;
所述动力装置还包括多个驱动各所述辅助手指移动的第三驱动装置,所述辅助手指的末端指节与所述第三驱动装置铰接,中间指节与所述手部基座通过第一连杆铰接;
所述主手指和辅助手指的所述前端指节与所述末端指节分别通过第二连杆铰接。
作为一种仿生灵巧手的优选技术方案,所述第一驱动装置的输出端铰接有直齿条,所述摆动组件设有与所述直齿条啮合的弧形齿部,所述第一驱动装置通过驱动所述直齿条移动以带动所述摆动组件沿所述弧形齿部的弧度摆动。
作为一种仿生灵巧手的优选技术方案,所述第二驱动装置的输出端铰接有斜齿条,所述屈伸组件设有与所述斜齿条啮合的斜齿部,所述斜齿部环绕所述屈伸组件与所述摆动组件的铰接点设置,所述第二驱动装置通过驱动所述斜齿条移动以带动所述屈伸组件绕所述铰接点转动。
作为一种仿生灵巧手的优选技术方案,所述摆动组件设有滑槽,所述斜齿条滑动设置于所述摆动组件内,所述第二驱动装置驱动所述斜齿条沿所述滑槽往复运动,以带动所述屈伸组件绕所述铰接点正向或反向转动。
作为一种仿生灵巧手的优选技术方案,所述屈伸组件还包括沿所述斜齿部的径向延伸的摆臂,所述摆臂设有与所述末端指节的铰接孔、与所述中间指节铰接的铰接孔。
作为一种仿生灵巧手的优选技术方案,所述手掌组件还包括固定于所述手部基座的第一轴承安装座,所述第一驱动装置通过关节轴承固定于所述第一轴承安装座;
作为一种仿生灵巧手的优选技术方案,所述手掌组件还包括固定于所述手部基座的第二轴承安装座,所述第二驱动装置通过关节轴承固定于所述第二轴承安装座。
作为一种仿生灵巧手的优选技术方案,所述手掌组件还包括固定于所述手部基座的第三轴承安装座,多个所述第三驱动装置均固定于所述第三轴承安装座。
作为一种仿生灵巧手的优选技术方案,所述第三驱动装置通过关节轴承固定于所述第三轴承安装座。
作为一种仿生灵巧手的优选技术方案,还包括控制装置,所述前端指节、中间指节和末端指节中的至少一个内侧设有与所述控制装置电连接的力传感器;
作为一种仿生灵巧手的优选技术方案,还包括控制装置,所述动力装置设有与所述控制装置电连接的力传感器。
作为一种仿生灵巧手的优选技术方案,所述手掌组件外部包覆有柔性垫;
作为一种仿生灵巧手的优选技术方案,所述主手指和所述辅助手指设置有柔性垫。
由于采用上述技术方案,本发明具有如下有益效果:
1.本申请公开的仿生灵巧手,手指部分分为主手指和辅助手指,通过主手指和辅助手指的配合握持实现对物体的摄取、抓取、拿握,结合手掌组件共同完成人手部的仿生动作,动作准确性高。主手指和辅助手指均包括是三个指节,以此可满足每个手指的三自由度与其他手指的配合,从而提高灵活性。在传动结构上,主手指的末端指节与手掌组件铰接,并且末端指节、中间指节和前端指节分别依次铰接,以形成模仿人体手指的关节结构。辅助手指的中间指节与手掌组件通过第一连杆铰接,前端指节与末端指节通过第二连杆铰接,第三驱动装置可驱动辅助手指的末端指节动作,并依次带动中间指节、前端指节动作,中间指节与手部基座配合时可使中间指节在第一连杆预设的转动范围内转动,前端指节与末端指节配合时可使前端指节在第二连杆预设的转动范围内转动。本申请的主手指由第一驱动装置和第二驱动装置驱动,实现仿生大拇指的摆动及屈曲伸展运动,屈伸组件安装在摆动组件上,随着摆动组件在第一驱动装置的作用下内外摆动,屈伸组件也随之运动,并在第二驱动装置的作用下驱动主手指的屈伸,屈伸组件与主手指的末端指节铰接,并且还与中间指节铰接,因此当屈伸组件运动时,能够同时带动主手指的末端指节和中间指节动作,结合末端指节与前端指节通过第二连杆铰接的结构,实现了主手指的灵巧屈伸动作。通过上述结构,简化了仿生灵巧手的驱动结构以及联动结构,保证了手指运动的灵活性,而且由于各指节之间以及指节与驱动装置均为连杆传动,大大提高了传动的可靠性。
2.本申请通过在主手指和辅助手指上设置力传感器,以通过反馈的数据对抓取过程实施精确力控,从而实现在摄取、抓取、拿握物体时的精准力控制。而且由于本申请的每个手指均分为三个指节,根据需要设置多个力传感器可进一步提高握力的仿生模拟性能。此外,本申请还设置有连接动力装置的力传感器,直接对施力端进行力检测,提高力检测的准确性。
3.本申请在手掌组件、主手指、辅助手指上设置的柔性垫能够在于物体接触的部位形成弹性抵接,可降低抓取过程中碰撞能量,避免设备或物体损坏,并能保证稳定的抓取物体,防止物体脱落,抓取可靠。
4.本申请驱动主手指摆动时,依靠直线电机带动直齿条运动,进而通过直齿条带动摆动组件摆动,驱动主手指摆动所需的空间仅为直齿条运动的空间以及摆动组件摆动所需的空间。同时,驱动主手指屈伸时,依靠直线电机带动斜齿条移动,由于斜齿条滑动设置在摆动组件内,且能够随着摆动组件一同移动,当需要主手指屈伸抓取时,再通过斜齿条带动屈伸组件摆动并带动各指节发生动作,摆动和屈伸的两种运动传动结构集成设置,相对于传统的电机驱动或者气缸驱动结构,显著降低空间占用,传动更加高效可靠。
5.由于普通轴承只能限制部件沿一个轴旋转,本申请的动力装置均通过球轴承固定在轴承座上,则不仅可以绕轴旋转,还保留另外两个轴的摆动自由度,因此可以弥补制造误差,以及增加结构使用范围。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为本发明一实施例中仿生灵巧手的结构示意图(1)。
图2为本发明一实施例中仿生灵巧手的结构示意图(2)。
图3为本发明一实施例中仿生灵巧手的局部剖视图(1)。
图4为本发明一实施例中仿生灵巧手的局部剖视图(2)。
图5为本发明一实施例中仿生灵巧手主手指的驱动结构示意图。
图6为本发明一实施例中仿生灵巧手主手指的爆炸示意图。
图7为本发明一实施例中仿生灵巧手手掌组件辅助手指部分驱动结构的爆炸示意图。
图8为本发明一实施例中仿生灵巧手辅助手指的局部示意图。
图9为本发明一实施例中仿生灵巧手辅助手指的爆炸示意图。
附图标记说明:
1-第一连杆,2-第二连杆,3-柔性垫,4-力传感器,5-主手指,6-辅助手指,7-末端指节,8-中间指节,9-前端指节,10-手掌组件,101-手部基座,1011-滑动安装槽,102-动力装置,1021-第一驱动装置,1022-第二驱动装置,1023-第三驱动装置,103-摆动组件,1031-弧形齿部,1032-滑槽,104-屈伸组件,1041-斜齿部,1042-摆臂,105-转接件,106-直齿条,107-滚针轴承,108-斜齿条,109-铰接孔,110-第一轴承安装座,111-第二轴承安装座,112-第三轴承安装座,113-关节轴承。
具体实施方式
为了更清楚的阐释本发明的整体构思,下面再结合说明书附图以示例的方式进行详细说明。
需说明,在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
另外,在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。但注明直接连接则说明连接的两个主体之间并不通过过渡结构构建连接关系,只通过连接结构相连形成一个整体。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。
具体采取的方案是:
实施例1
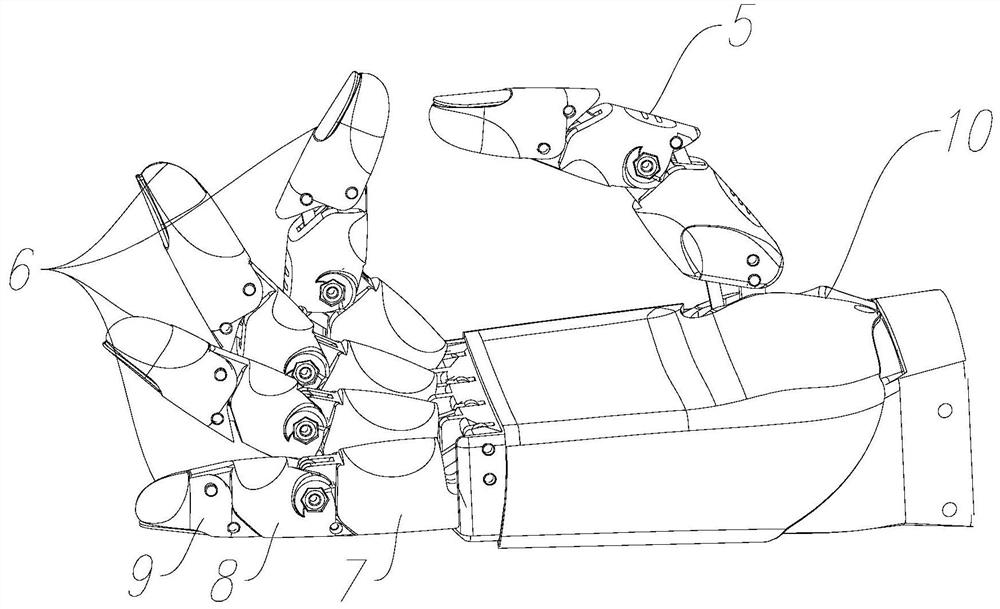
如图1、图2所示,本实施例公开的一种仿生灵巧手,包括手掌组件10、仿生为拇指的主手指5和与主手指5配合抓取的多个辅助手指6。其中,辅助手指6可以参照人体的手部形态进行结构设计,以满足手部活动的灵活性,辅助手指6可仿生为人体手部的四指,包括食指、中指、无名指和小指。
如图3、图4所示,手掌组件10包括手部基座101和安装于手部基座101的动力装置102,手部基座101用于对动力装置102的安装、固定,以及起到对主手指5、辅助手指6的安装、定位功能,此外,手部基座101还用于其他元器件的安装。本实施例涉及的仿生灵巧手,为了保证灵巧,手指部分均具有较高的自由度,为了更接近人体手部形态,主手指5和辅助手指6均包括依次相互铰接的前端指节9、中间指节8和末端指节7,通过动力装置102对各手指进行驱动,五个手指共15个自由度满足灵巧性。通过主手指5和辅助手指6的配合握持实现对物体的摄取、抓取、拿握,结合手掌组件10共同完成人手部的仿生动作,动作准确性高。主手指5和辅助手指6均包括是三个指节,以此可满足每个手指的三自由度与其他手指的配合,从而提高灵活性。
动力装置102包括驱动主手指5移动的第一驱动装置1021和第二驱动装置1022,第一驱动装置1021传动连接摆动组件103,第二驱动装置1022传动连接屈伸组件104,实现仿生大拇指的摆动及屈曲伸展运动。屈伸组件104铰接于摆动组件103以在第二驱动装置1022的作用下沿铰接点转动,主手指5的末端指节7铰接于屈伸组件104,且屈伸组件104通过第一连杆1传动铰接主手指5的中间指节8,主手指5的前端指节9与末端指节7通过第二连杆2铰接。屈伸组件104转动过程中,带动末端指节7转动的同时,带动中间指节8沿与第一连杆1的铰接点转动,多个指节联动,从而模仿人体手指的关节结构,形成手指屈伸的效果。
动力装置102还包括多个驱动各辅助手指6移动的第三驱动装置1023,辅助手指6的末端指节7与第三驱动装置1023铰接,中间指节8与手部基座101通过第一连杆1铰接;辅助手指6的前端指节9与末端指节7通过第二连杆2铰接。辅助手指6的中间指节8与手掌组件10通过第一连杆1铰接,前端指节9与末端指节7通过第二连杆2铰接,第三驱动装置1023可驱动辅助手指6的末端指节7动作,并依次带动中间指节8、前端指节9动作,中间指节8与手部基座101配合时可使中间指节8在第一连杆1预设的转动范围内转动,前端指节9与末端指节7配合时可使前端指节9在第二连杆2预设的转动范围内转动。
随着摆动组件103在第一驱动装置1021的作用下内外摆动,屈伸组件104也随之运动,并在第二驱动装置1022的作用下驱动主手指5的屈伸,屈伸组件104与主手指5的末端指节7铰接,并且还与中间指节8铰接,因此当屈伸组件104运动时,能够同时带动主手指5的末端指节7和中间指节8动作,结合末端指节7与前端指节9通过第二连杆2铰接的结构,实现了主手指5的灵巧屈伸动作。通过上述结构,简化了仿生灵巧手的驱动结构以及联动结构,保证了手指运动的灵活性,而且由于各指节之间以及指节与驱动装置均为连杆传动,大大提高了传动的可靠性。
实施例2
如图4、图5、图7所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,主手指5由齿条结构驱动,拇指共有一个外摆、内收自由度和一个屈曲、伸展自由度,其中,屈曲、伸展运动机构被耦合设置在外摆转动机构上。具体的,第一驱动装置1021的输出端铰接有直齿条106,手部基座101设置有直齿条106的滑动安装槽1011,第一驱动装置1021驱动通过转接件105铰接的直齿条106在滑动安装槽1011内往复运动,摆动组件103通过滚针轴承107转动安装在手部基座101上,设有与直齿条106啮合的弧形齿部1031,第一驱动装置1021通过驱动直齿条106移动以带动摆动组件103沿弧形齿部1031的弧度摆动。
本实施例中的第一驱动装置1021优选为直线电机,以节省手掌组件10的空间占用,实现小空间内运动的灵巧化。
本实施例主手指5摆动时,依靠直线电机带动直齿条106运动,进而通过直齿条106带动摆动组件103摆动,驱动主手指5摆动所需的空间仅为直齿条106运动的空间以及摆动组件103摆动所需的空间,极大的优化了驱动机构的空间占用。
实施例3
如图4、图5、图7所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,第二驱动装置1022与手部基座101柔性连接,第二驱动装置1022的输出端通过转接件105传动铰接有45°斜齿条108,屈伸组件104设有与斜齿条108啮合的斜齿部1041,斜齿部1041环绕屈伸组件104与摆动组件103的铰接点设置,第二驱动装置1022通过驱动斜齿条108移动以带动屈伸组件104绕铰接点转动。驱动主手指5屈伸时,依靠直线电机带动斜齿条108移动,由于斜齿条108滑动设置在摆动组件103内,且能够随着摆动组件103一同移动,当需要主手指5屈伸抓取时,再通过斜齿条108带动屈伸组件104摆动并带动各指节发生动作,摆动和屈伸的两种运动传动结构集成设置,相对于传统的电机驱动或者气缸驱动结构,显著降低空间占用,传动更加高效可靠。
进一步的,如图5所示,在一个实施例中,摆动组件103设有滑槽1032,斜齿条108滑动设置于摆动组件103内,第二驱动装置1022驱动斜齿条108沿滑槽1032往复运动,以带动屈伸组件104绕铰接点正向或反向转动。斜齿条108与屈伸组件104在摆动组件103的滑槽1032通过45°的齿轮齿条副内啮合传动,并将斜齿条108的直线运动转换为屈伸组件104的转动运动。
更进一步的,如图5所示,在一个实施例中,屈伸组件104还包括沿斜齿部1041的径向延伸的摆臂1042,摆臂1042设有与末端指节7的铰接孔109、与中间指节8铰接的铰接孔109。
同时结合图6,在屈伸组件104的远端有主手指5的末端指节7铰接孔109,通过滚花销钉与主手指5的末端指节7固定连接,在主手指5的末端指节7与中间指节8通过大平头螺钉螺母,转动铰接固定。在屈伸组件104末端指节7铰接孔109的下方位置有第一连杆1的铰接孔109,通过滚花销钉与主手指5中间指节8第一连杆1转动连接。前端指节9与末端指节7通过第二连杆2传动铰接,驱动第二驱动装置1022即可实现主手指5的屈曲和伸展关节运动,驱动第一驱动装置1021即可实现主手指5的外摆和内收关节运动,第一驱动装置1021和第二驱动装置1022联动即可实现主手指5实现符合大拇指生物运动特性的关节运动。驱动主手指5屈伸时,依靠直线电机带动斜齿条108移动,由于斜齿条108滑动设置在摆动组件103内,且能够随着摆动组件103一同移动,当需要主手指5屈伸抓取时,再通过斜齿条108带动屈伸组件104摆动并带动各指节发生动作,摆动和屈伸的两种运动传动结构集成设置,相对于传统的电机驱动或者气缸驱动结构,显著降低空间占用,传动更加高效可靠。
实施例4
如图5所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,手掌组件10还包括固定于手部基座101的第一轴承安装座110,由于普通轴承只能限制部件沿一个轴旋转,第一驱动装置1021通过关节轴承113固定于第一轴承安装座110。同理,在另一个实施例中,手掌组件10还包括固定于手部基座101的第二轴承安装座111,第二驱动装置1022通过关节轴承113固定于第二轴承安装座111。采用关节轴承113后,第一驱动装置1021和第二驱动装置1022不仅可以绕轴旋转,还保留另外两个轴的摆动自由度,因此可以弥补制造误差,以及增加结构使用范围。
实施例5
如图7所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,手掌组件10还包括固定于手部基座101的第三轴承安装座112,由于辅助手指6的结构及驱动形式近似,因此多个第三驱动装置1023均承固定于第三轴承安装座112,通过轴承安装座实现对多个第三驱动装置1023的固定,简化装配工序,提高结构集成度。
进一步的,如图7所示,在一个实施例中,第三驱动装置1023通过关节轴承113固定于第三轴承安装座112,第三驱动装置1023可以绕轴旋转,使辅助手指6结合物体外形而自适应的微调整握持物体姿态,弥补制造误差,增加结构使用范围。
实施例6
如图5、图7所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,为了提高抓取、握持物体的可靠性,还包括控制装置,前端指节9、中间指节8和末端指节7中的至少一个内侧设有与控制装置电连接的力传感器4;同样的,在另一个实施例中,动力装置102设有与控制装置电连接的力传感器4。本领域技术人员可以理解的是,控制装置可以对应的设置在手掌组件10内部,也可设置在手掌组件10外部,本实施例对控制装置的设置位置不做具体限定。在直线电机尾部设置有力反馈传感器,利用接触物体的作用与反作用力的原理,根据机械手与物体接触瞬间的相互作用力的物理过程,通过5根手指内置的力传感器4的相应电阻值变化量,对被触摸物体进行样貌采集,从而预估被握持物体的形状、质量从而确定实施摄拾、抓取、抓握物件运动。在动力装置102尾部集成的力传感器4,可保证在实现手指符合生物动物特性的关节运动的过程中实现精确力控制。
实施例7
如图6、图9所示,在结合实施例1的前提下,本实施例公开的一种仿生灵巧手中,为了避免对抓取物体时对物体直接刚性抓取对物体造成损伤,手掌组件10外部包覆有柔性垫3;同样的,在一个实施例中,主手指5和辅助手指6也设置有柔性垫3。在手掌、手背、手指腹部均设置有弹性橡胶材料,用于在握持易碎、柔性物体时通过电阻反馈值以及电机的位置信息进行预估物体形状和质地信息进行采集,保证在抓取易碎物体时既能平稳握持住物体又不会使易碎物体破碎和握持软质物体时能轻轻地握持住物体而不破损,从而达到近似真手的轻灵沉着、刚柔并济的功能及灵活性。
如图3-图9所示,结合前述实施例,主手指5的具体结构如下:主手指5的第一驱动装置1021通过尾部的关节轴承113与手部基座101的第一轴承安装座110柔性固定连接,第一驱动装置1021输出轴通过转接件105与摆动组件103通过铆钉铰接直齿条106,直齿条106啮合传动摆动组件103,以驱动摆动组件103摆动,摆动组件103设置滑槽1032。第二驱动装置1022通过尾部的关节轴承113与手部基座101的第二轴承安装座111柔性固定连接,第二驱动装置1022输出轴通过转接件105铰接斜齿条108,斜齿条108滑动设置在摆动组件103的滑槽1032内,由于第二驱动装置1022通过关节轴承113固定在第二轴承安装座111上,摆动组件103摆动的同时可带动斜齿条108在滑槽1032内适应性调整位置,斜齿条108与屈伸组件104啮合,并由第二驱动装置1022驱动斜齿条108在滑槽1032内往复运动,可带动屈伸组件104绕轴转动。屈伸组件104与主手指5的末端指节7铰接孔109通过滚花销铰接,末端指节7和中间指节8通过螺钉螺母转动连接,第一连杆1近端与屈伸组件104通过滚花销转动连接,第一连杆1远端通过滚花销与中间指节8转动连接,在末端指节7、中间指节8的安装孔正下方设有第二连杆2的铰接孔109,通过滚花销将第二连杆2近端与末端指节7铰接孔109转动连接,中间指节8与前端指节9通过滚花销转动连接,第二连杆2远端与前端指节9通过滚花销轴转动连接。末端指节7的指肚、指背分别嵌装柔性垫3,中间指节8的指肚、指背分别嵌装柔性垫3,前端指节9的末端嵌装有柔性垫3。通过驱动第一驱动装置1021和第二驱动装置1022,即可实现主手指5摆动和屈伸的复合运动。
辅助手指6的具体结构如下:辅助手指6的第三驱动装置1023通过尾部的关节轴承113与手部基座101的第三轴承安装座112柔性固定连接,第三驱动装置1023输出轴通过转接件105与辅助手指6的末端指节7安装孔通孔滚花销铰接,末端指节7与手部基座101通过长滚花销轴铰接,末端指节7和中间指节8通过螺钉螺母转动连接,第一连杆1近端与手部基座101通过长滚花销轴转动连接,第一连杆1远端通过滚花销与中间手指转动连接,在末端指节7、中间指节8的安装孔正下方有第二连杆2的安装孔,通过滚花销将第二连杆2近端与末端指节7安装孔转动连接,中间指节8与前端指节9通过滚花销转动连接,第二连杆2远端与前端指节9通过滚花销轴转动连接。末端指节7的指肚、指背分别嵌装柔性垫3,中间指节8的指肚、指背分别嵌装柔性垫3,前端指节9的末端嵌装有柔性垫3。通过驱动第三驱动装置1023往复运动,即可实现辅助手指6屈曲、伸展往复运动。
本申请公开的一种仿生灵巧手,其五个手指的15个自由度分别由6个直线电机驱动,其中,拇指由两个直线电机结合两个齿轮齿条副实现拇指的外摆及屈曲伸展运动,其余四指通过多连杆机构将直线电机输出的直线运动转化为手指的屈曲、伸曲运动,从而实现手指诸如摄拾、抓取、抓握物件运动。本申请提供的具有力感知能力的仿生灵巧手,用结构紧凑的直线伺服电机代替手指部位肌腱,并在伺服电机与末端指节7中集成力传感器4,可精确实现的手部的生物力学功能,从仿生结构、仿生运动特性方面均做到了不仅形式而且神似的高仿人手。
本发明所保护的技术方案,并不局限于上述实施例,应当指出,任意一个实施例的技术方案与其他一个或多个实施例中技术方案的结合,在本发明的保护范围内。虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 灵巧手腱绳驱动单元、驱动装置及仿生灵巧手
- 灵巧手腱绳驱动单元、驱动装置及仿生灵巧手