一种提高选区激光熔化成形零件质量的智能除渣装置
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及3D打印领域,具体的,涉及一种提高选区激光熔化成形零件质量的智能除渣装置。
背景技术
目前市面上所有金属3D打印机均未安装此除尘系统,主要的除尘方式为通过打印舱室的风场将激光熔化区域飞溅产生的废渣吹走,但是还会有少量的废渣并未吹扫干净,导致每层激光熔化区域累积废渣,经过打印过程的持续,零件孔隙率会增加,导致零件品质下降,此外,风场也会将飞溅残渣带到舱室一侧,并大量堆积,此方式除尘效率低,打印质量不高,同时原材料在进行二次使用时也会受到残渣污染。
发明内容
有鉴于此,本发明的目的是提供一种提高选区激光熔化成形零件质量的智能除渣装置,可以提高金属3D打印机除渣效率,明显提高零件打印质量,并且能够降低原材料成本。
本发明的目的是通过以下技术方案实现的:
一种提高选区激光熔化成形零件质量的智能除渣装置,包括
跟随打印位置移动的吸尘器吸头,与3D打印机的循环泵连接,
定位移动机构,与3D打印机的PLC连接,
所述吸尘器吸头和定位移动机构均设置在3D打印机的内部。
进一步,所述定位移动机构包括X轴移动部分和Y轴移动部分;
所述吸尘器设置在所述X轴移动部分上,可沿着第一方向往复运动;
所述X轴移动部分设置在Y轴移动部分上,可沿着第二方向往复运动。
进一步,所述X轴移动部分包括第一丝杆和滑块和两个间隔布置且平行布置的第一滑轨,所述滑块与两个所述第一滑轨连接,所述第一丝杆用于驱动所述滑块沿着所述第一滑轨的轴线方向往复运动,所述吸尘器吸头固定在所述滑块上。
进一步,所述X轴移动部分还包括用于驱动所述第一丝杆转动的第一伺服电机。
进一步,所述Y轴移动部分包括第二丝杆和两个间隔且平行布置的第二滑轨,所述第二丝杆用于驱动所述第一滑轨在所述第二滑轨的轴线方向往复运动。
进一步,所述Y轴移动部分还包括用于驱动所述第二丝杆转动的第二伺服电机。
进一步,所述第一伺服电机和第二伺服电机均与3D打印机的PLC连接。
进一步,所述吸尘器吸头与3D打印机循环泵之间设有连接软管。
进一步,还包括固定在3D打印机的内部的底板,所述定位移动机构固定在所述底板上。
本发明的有益效果是:
本发明通过使用移动式电动微型吸尘器,跟随激光扫描路径,将微区熔化的飞溅粉末残渣吸收,避免落入打印熔化区域,提高金属3D打印机除渣效率,明显提高零件打印质量,并且能够降低原材料成本,最终提高成形零件品质。
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
附图1为本发明结构示意图;
附图2为本发明运行原理图。
具体实施方式
以下将参照附图,对本发明的优选实施例进行详细的描述。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
本实施例提出了一种提高选区激光熔化成形零件质量的智能除渣装置,通过使用移动式电动微型吸尘器,跟随激光扫描路径,将微区熔化的飞溅粉末残渣吸收,避免落入打印熔化区域,从而提高选区激光熔化每一层的打印熔化质量,最终提高成形零件品质。
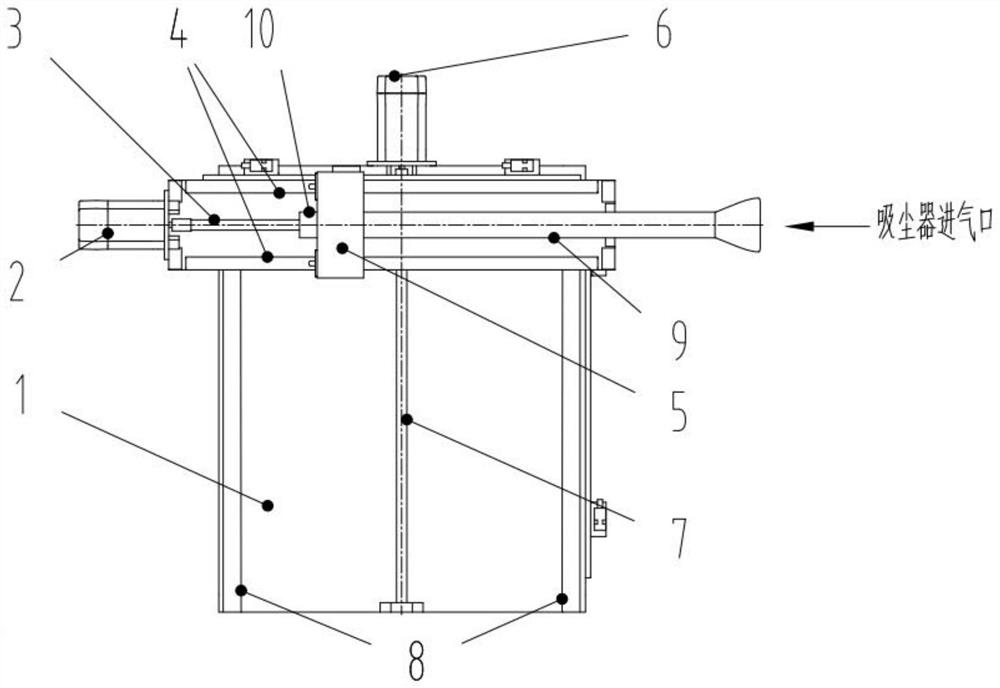
具体的,如图1所示,包括底板1、第一伺服电机2、第一丝杆3、第一滑轨4、滑块5、第二伺服电机6、第二丝杆7、第二滑轨8、吸尘器吸头9和吸尘器吸头接口10。
底板1固定在3D打印机的内部,底板1上固定有定位移动机构,定位移动机构用于驱动吸尘器吸头9跟随打印位置移动,吸尘器吸头9与3D打印机的循环泵连接用于产生吸取的动力,吸尘器吸头9远离吸尘器进气口的一端设有吸尘器吸头接口10,在吸尘器吸头接口10于3D打印机的循环泵之间设有连接软管,连接软管为钢丝管。
定位移动机构与3D打印机的PLC连接,使得3D打印机的PLC可以控制定位移动机构,最终达到吸尘器吸头9跟随打印位置的移动的技术目的。
定位移动机构包括X轴移动部分和Y轴移动部分,X轴移动部分可沿着X轴方向往复运动,Y轴移动部分可沿着Y轴方向往复运动,本实施例中X轴方向为水平方向,Y轴方向为竖直方向,即垂直于X轴的方向。
X轴移动部分包括第一伺服电机2、第一丝杆3、两个间隔、平行布置的第一滑轨4和滑块5,第一丝杆3位于两个第一滑轨4之间,第一伺服电机2位于第一丝杆3的端部,用于驱动第一丝杆3转动,滑块5的上、下两端分别与两个第一滑轨4滑动连接,例如在滑块5与第一滑轨4之间设置滑动轴承,或者两者分别设置滑道和与之适配的凹陷。第一丝杆3与滑块5之间设置滚珠和螺母,第一丝杆3、滚珠和螺母组成了滚珠丝杆副,用于驱动滑块5沿着第一滑轨4的轴向方向往复运动。吸尘器吸头9设置在滑块5上,滑块5与两个第一滑轨4的一个侧面连接。
Y轴移动部分包括第二伺服电机6、第二丝杆7和间隔且平行布置的两个第二滑轨8,第二丝杆7位于两个第二滑轨8之间,第二丝杆7与两个第一滑轨4的另一个侧面连接,第二丝杆7与第一滑轨4之间设有滑动轴承或者滚珠和螺母,且第一滑轨4与第二滑轨8为活动连接,例如在第二滑轨8与第一滑轨4之间设置滑动轴承,或者两者分别设置滑道和与之适配的凹陷,达到第二丝杆7的转动下使两个第一滑轨4沿着第二滑轨8的轴线方向往复滑动的技术目的。第二伺服电机6位于第二丝杆7的端部,用于驱动第二丝杆7转动,进而使得第一滑轨4沿着第二滑轨8的轴向方向移动。
如图2所示,本装置的实施方式是:吸尘器进气口位于激光11附近,而激光11的位置为打印的位置,由于定位移动机构与3D打印机的PLC连接,因此吸尘器进气口可随着激光11的位置变化而变化,当激光11作用于位于成型缸13上的零件实体12时,会产生残渣,吸尘器吸头9会随时将残渣排出,同时3D打印机还设有出风口14,用于平衡内部的气压。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。