机动车中的纵向引导驾驶员辅助系统
文献发布时间:2023-06-19 09:47:53
技术领域
本发明涉及一种机动车中的在自动纵向引导运行下(例如,在巡航控制被激活时)的纵向引导驾驶员辅助系统。
背景技术
原则上,被设计为巡航控制系统的许多纵向引导驾驶员辅助系统是已知的,这些纵向引导驾驶员辅助系统将机动车的速度调节到预设的目标速度或最大允许的最高速度。除了这些纵向控制系统之外,现在还已经可以从一些制造商处获得扩展有距离控制的纵向控制系统,所谓的距离相关的纵向控制系统或巡航控制系统。这样的系统(例如BMW“主动巡航控制”ACC)使得能够在保持与前方车辆的期望距离的情况下,以期望的或相应较低的速度自动驾驶机动车。如果安装在机动车上的距离传感器系统——该距离传感器系统特别地可以基于雷达工作——在自己的车道中识别出前方行驶的目标对象或(机动)车辆,则通过驱动马达和/或车轮制动系统的减速干预将自己的速度适配于前方行驶的机动车或目标对象的速度,使得在“主动巡航控制”或相应的纵向控制系统中所包含的距离控制自动地调节到并保持与前方行驶的机动车或目标对象的、与情况相适应的距离。
DE 10 2012 211 967 A1描述了由速度限制系统和巡航控制系统构成的组合,其中速度限制系统的最大允许的最高速度可以代替所设置的设定速度被用作巡航控制的(新的)期望速度或目标速度。
最后,例如从DE 10 2015 213 181 B3中已知一种驾驶员辅助系统,该驾驶员辅助系统可以从导航系统的地图数据中和/或借助于图像处理预测性地识别出速度限制,并且从到达速度限制开始,向驾驶员持续地显示该速度限制,使得驾驶员可以在有需要时自主地将其速度适配于速度限制(例如,BMW速度限制辅助系统(Speed Limit Assist)或BMW高效动态先导系统(Eficient Dynamic Pilot))。
从DE 10 2015 213 181 B3中已知的用于机动车的纵向引导驾驶员辅助系统主要包括:检测系统,该检测系统用于识别当前适用的或即将发生的、需要改变最大允许的最高速度的相关事件;第二检测系统,该第二检测系统可以是第一检测系统的一部分或者还可以与第一检测系统相同,该第二检测系统用于识别待行驶的路线;以及功能单元,该功能单元可以在识别出当前适用的或即将发生的相关事件时在考虑相关事件的地点(以及可选的其他必要信息,诸如所求取的在相关事件的地点处的最大允许速度、车辆与所求取的新的最大允许速度之间的速度差、所识别的自由行驶或跟随行驶、车辆的当前的或允许的减速运行运行,诸如航行运行、滑行运行、制动运行)的情况下,求取取决于地点的如下时间点,在到达该时间点时,功能单元触发对当前最大允许的最高速度的自动调整,或者触发输出请求提示以允许将当前的最大允许的最高速度自动调整到新的最大允许的最高速度。如果及时识别出即将发生的事件,则将理想地求取车辆(至少几乎)在相关事件的地点达到所求取的最大允许的最高速度的减速策略。然后,根据所求取的减速策略得出待求取的取决于地点的如下时间点,在该时间点触发对当前的最大允许的最高速度的自动调整,或者触发输出请求提示以允许将当前的最大允许的最高速度自动调整到新的最大允许的最高速度。
发明内容
本发明的目的在于,在将速度调整为改变后的目标速度时在舒适性和能耗方面改进纵向引导驾驶员辅助系统。
该目的通过根据权利要求1的驾驶员辅助系统来实现。从从属权利要求中得出有利的改进方案。
本发明涉及一种机动车中的纵向引导驾驶员辅助系统,该纵向引导驾驶员辅助系统具有:
–第一检测系统,用于识别第一事件,该第一事件基于实际速度导致在预设的取决于地点的第一时间点预设提高的目标速度;并且该第一检测系统用于识别随后的第二事件,该第二事件基于提高的目标速度导致在预设的取决于地点的第二时间点预设与该提高的目标速度相比降低的目标速度,
–第二检测系统,用于预测性地识别从提高的目标速度到降低的目标速度的预设的减速潜力,以及
–功能单元,如果在到提高的目标速度的加速度不被减小的情况下,以预设的减速潜力无法在第二事件的取决于地点的时间点完成随后的到降低的目标速度的减速,则该功能单元使到提高的目标速度的加速度减小。
功能单元优选地被设置为:根据与地点相关的距第二事件的预设时间间隔,基于凭经验求取的表格式预设,使到提高的目标速度的加速度减小。
在本发明的另一有利的设计方案中,提高的目标速度是由驾驶员预设的设定速度,并且对设定速度的预设是第一事件。
在本发明的另一有利的设计方案中,降低的目标速度是最大允许的最高速度,并且对最高速度的预设是第二事件。
在本发明的另一有利的设计方案中,第二事件是针对驶入环岛的最大允许的最高速度、针对从出口驶出的最大允许的最高速度、和/或针对驶过具有预先确定的弯道半径的至少一个弯道的最大允许的最高速度。
在本发明的另一有利的设计方案中,降低的目标速度是虚拟的最大允许的最高速度,可以在功能单元中从第二事件(例如,具有相对较小的弯道半径的弯道或高速公路出口)的危急程度中确定该虚拟的最大允许的最高速度。
附加地,最大允许的最高速度还可以例如通过交通标志来预设,其中交通标志的位置同时代表事件的时间点。
特殊情况功能:
在本发明的备选设计方案或另一有利的设计方案中,功能单元通过特殊情况功能被设计为使得从(第三)时间点起才根据预设的减速潜力来减小实际速度,从该时间点起基于实际速度可以尽可能精确地在第二事件的取决于地点的时间点达到降低的目标速度。在识别到如下的第一事件时并且在识别到后续的如下的第二事件时会激活特殊情况功能,该第一事件基于实际速度导致可选地在预设的取决于地点的第一时间点不是预设提高的目标速度而是预设保持不变的目标速度,该第二事件基于实际速度导致在预设的取决于地点的第二时间点预设与实际速度相比降低的目标速度。
扩展事件选择:
在本发明的备选设计方案或另一有利的设计方案中,当在预设的考虑时间段中彼此相对接近的事件中的大多数事件存在时,可以在功能单元中以扩展事件选择的形式确定降低的目标速度,使得仅选择基于当前目标速度导致降低的目标速度的事件,当前目标速度可以是实际速度或提高的目标速度。此外,在预设的考虑时间段中,在扩展事件选择中可以仅选择相对于相应的先前事件具有降低的目标速度的事件。最后,在预设的考虑时间段中,在扩展事件选择中还可以仅选择相对于相应的先前事件具有(优选地取决于驾驶模式而可以应用的)经定义的最小距离的事件。此外,仅选择以预设的减速潜力可以在相应的所选择的事件的取决于地点的时间点到达的事件。最后,从该选择中选出最小的降低的目标速度作为用于巡航控制或加速度控制的降低的目标速度。
本发明基于以下考虑:
基本思想是在机动车的自动纵向引导运行下对加速特性的经改进的调整,特别是当在由于第一事件(例如,驾驶员提高巡航控制系统的设定速度)而有待发生的、到提高的第一目标速度的加速之后又需要降速到降低的第二目标速度时。为此,根据本发明的纵向引导驾驶员辅助(控制)系统具有呈计算机程序产品形式的相应编程的功能单元,该计算机程序产品可以被集成在本身已知的用于驾驶员辅助系统的电子控制器中。
本发明基于实现自动干预目标速度的纵向引导(例如,“巡航控制”、“ACC自适应巡航控制”)。该自动纵向控制可以包括位置控制(在相对于实际位置的一个地点处的速度和加速度的目标预设)。此外,已知如下的导航系统,这样的导航系统可以将前方的地图属性以区段及其特性的形式传输给纵向控制系统。另外,还以如下的系统为前提,该系统可以针对来自数字地图的事件(“Events”,诸如弯道、环岛、转弯、交通信号灯等)自动进行控制。
针对弯道、转弯、限速或环岛的常规预测性控制通常具有基本动态特性,在驶过事件(“Events”)之后或在激活系统时或在退出在前方车辆后面的跟随行驶时,车辆以该基本动态特性加速。这种加速特性在具有许多事件的行驶路线上被认为过于动态,并且从行驶经济性的角度来看被认为不合理。
根据本发明的纵向引导驾驶员辅助(控制)系统考虑了当前可用的加速潜力或减速潜力,并且特别是在先前由于第一事件而加速到提高的目标速度之后直到第二事件的地点到降低的目标速度所需的减速的情况下,根据本发明的纵向引导驾驶员辅助(控制)系统前瞻性地预测:是否可以利用该(负的)加速度达到纵向引导系统的目标速度,而不会以假设为线性的减速超过第二事件的地点的目标速度。(情况a)
如果不是这种情况(对直到事件的加速和减速的预测超过事件速度),则根据距第二事件的距离降低车辆的基本动态特性。因此,车辆会以降低的动态特性加速至第一事件的提高的目标速度。(情况b)
系统预测第一加速场景(在此,在特殊情况下,例如在高速公路路段上在打算驶出之前,加速度还可以是零)和随后的减速场景,从而可以明显更早地预测:充分利用全部加速潜力究竟是否有意义或是否必要。通过这种方式,一方面在许多事件中(例如,在蜿蜒的道路上)驾驶员感觉会明显更加舒适,并且另一方面减小加速潜力使得行驶特性更经济。
即将发生的事件(也称为“Events”)例如可以是暂时的或持久的速度限制,这样的速度限制可以直接在交通标志上给出,或者可以根据一般的交通法规从中得出(例如,在德国过境道路的速度限制为50km/h)。即将发生的事件同样还可以是解除速度限制的事件或至少一个提高到新的最高速度的事件,例如在离开城镇、环岛或弯道时通常便是这种情况。
在前方第二事件的地点处对于纵向引导驾驶员辅助系统而言重要的降低的(第二)目标速度可以是实际预设的新速度限制,或者可以是相对于预设的新速度限制向上或向下偏移预设量的速度,其中该预设量和偏移方向例如还可以由驾驶员在中央车辆菜单中设置。新的降低的(第二)目标速度可以由功能单元直接传输,或者先基于现有信息在功能单元中被求取。
在特定路线走向中可能出现的是,速度标志有时位于狭窄的弯道、环岛之前,或者在高速公路上位于出口之前或出口中。如果例如识别出这样的交通标志并且预期将变化到降低的(第二)目标速度(这可以自动进行或者在驾驶员手动确认允许之后进行),则对于驾驶员可能会出现不舒适的情况。例如,当在后续的路线上出现环岛或狭窄的弯道时——出于舒适性或安全性的原因又应当以较低的速度行驶通过这样的环岛或弯道——如果调整了允许的最高速度,这导致高的车辆加速度,则这可能使驾驶员感到不适或难以理解。此外,如果基于前方识别出的相关事件触发对允许的最高速度的调整,并且由于驾驶员例如想在下一出口离开当前道路而会导致车辆过早缓慢地减速,则例如也可能会妨碍后面的交通。本发明的目的在于避免触发这种对于驾驶员或后面的交通不当的车辆减速。
第一子方面是在自动纵向引导运行下对加速特性的调整。第二子方面是在自动纵向引导运行下的驶出策略。第三子方面是在自动纵向引导运行下用于巡航控制的事件的(扩展)选择。所有这三个子方面都涉及到降低目标速度的事件。
附图说明
借助于以下实施例详细解释本发明。其中:
图1示出了被设计为机动车中的巡航控制系统的纵向引导驾驶员辅助系统的示例性结构,该纵向引导驾驶员辅助系统用于将速度调节到目标速度,
图2a示出了根据上述情况a以及在自动纵向引导运行下由此产生的根据本发明的加速特性调整的第一情况,
图2b示出了根据上述情况b以及在自动纵向引导运行下由此产生的根据本发明的加速特性调整的第二情况,
图3示出了具有环岛的第一种具体交通情况,其中纵向引导驾驶员辅助系统的根据本发明的设计是有利的,
图4示出了具有高速公路出口的第二种具体交通情况,其中纵向引导驾驶员辅助系统的根据本发明的设计、特别是还具有在自动纵向引导运行下的特殊驶出策略的设计是有利的,并且
图5示出了具有极其蜿蜒的道路走向的第三种具体交通情况,其中纵向引导驾驶员辅助系统的根据本发明的设计、特别是还具有在自动纵向引导运行下的特殊的扩展事件选择的设计是有利的。
具体实施方式
图1示意性地示出了根据本发明的纵向引导驾驶员辅助系统的以下主要部件:
–第一预测性检测系统E1,用于识别第一事件e1,该第一事件基于实际速度v
–第二预测性检测系统E2,用于预测性地识别从提高的目标速度v
–功能单元FE,如果在到提高的目标速度v
–驱动单元AE和制动单元BrE,用于执行加速度设置或速度设置,以及
–显示-操作单元ABE,具有提示系统HS和操作元件BE,其中提示系统HS优选地显示相应选择的事件。
检测系统E1的输出信号e1和e2或ei、检测系统E2的输出信号a2、实际速度信号v
检测单元E1例如是基于地图的检测单元,该检测单元根据现有的地图数据、自己的位置和已知的前方路线区段来识别需要调整目标速度的事件e1和e2或ei(例如,限速、环岛、高速公路出口、弯道半径)。基于地图的检测单元E1被设计为使得:该检测单元一方面识别前方相关事件(例如,到达环岛、高速公路出口或急转弯)的地点,还识别从该地点起适用的最大允许目标速度的大小,并且将其作为取决于地点的时间点d2或t2传输到功能单元FE。
附加地,检测单元E1还可以基于摄像机,从而根据对准前方的(例如,视频)传感器系统的数据同样可以识别出可能需要调整目标速度的即将到来的限速事件。
功能单元FE可以在经定义的时间点在包括提示系统HS和操作元件BE的显示-操作单元ABE上向驾驶员输出相应的信号af。根据第一备选方案,取决于巡航控制系统的设计,原则上可以仅在所求取的新目标速度小于由驾驶员预设的最大期望目标速度时才触发输出。根据第二备选方案,可以独立于驾驶员所最大期望的目标速度进行输出。
如下的操作元件BE被设计为使得驾驶员可以在不输出请求提示的时间时请求手动改变目标速度v+/-,以便预设新的设定速度。驾驶员可以通过这样的操作元件BE来确认请求提示。
根据纵向引导驾驶员辅助系统的备选设计方案,功能单元FE还可以被设计为使得:该功能单元FE不是在允许确认z被输入之后才触发对速度的自动调整,而是在达到所求取的经定义的时间点时就自动触发对速度的自动调整。在这样的设计方案中,可以省去虚线所示的显示-操作单元ABE。
根据图2a和图2b,通过在地点d或时间t上绘制的车速v的曲线示出了在自动纵向引导运行下的——可以借助于功能单元FE中的相应计算机程序产品来实施的——根据本发明的加速特性调整。(另请参见上述情况a和情况b)。
图2a和图2b示出了相对于时间t的路段d,其中在地点d0或在时间点t0识别出呈80km/h的新的设定速度预设的形式的第一事件e1,基于40km/h的实际速度v
在图2a中示出了上述“情况a”。加速特性a1不必被调整,因为基于地点d1或时间点t1处的提高的目标速度v
在图2b中示出了上述“情况b”。加速特性a1必须被调整为减小的加速特性a’,因为否则基于地点d1或时间点t1处的提高的目标速度v
优选地,根据从时间点t0(和/或从时间点t1)到第二事件e2的时间点t2的——该第二事件e2在此涉及到同时变化到降低的目标速度v
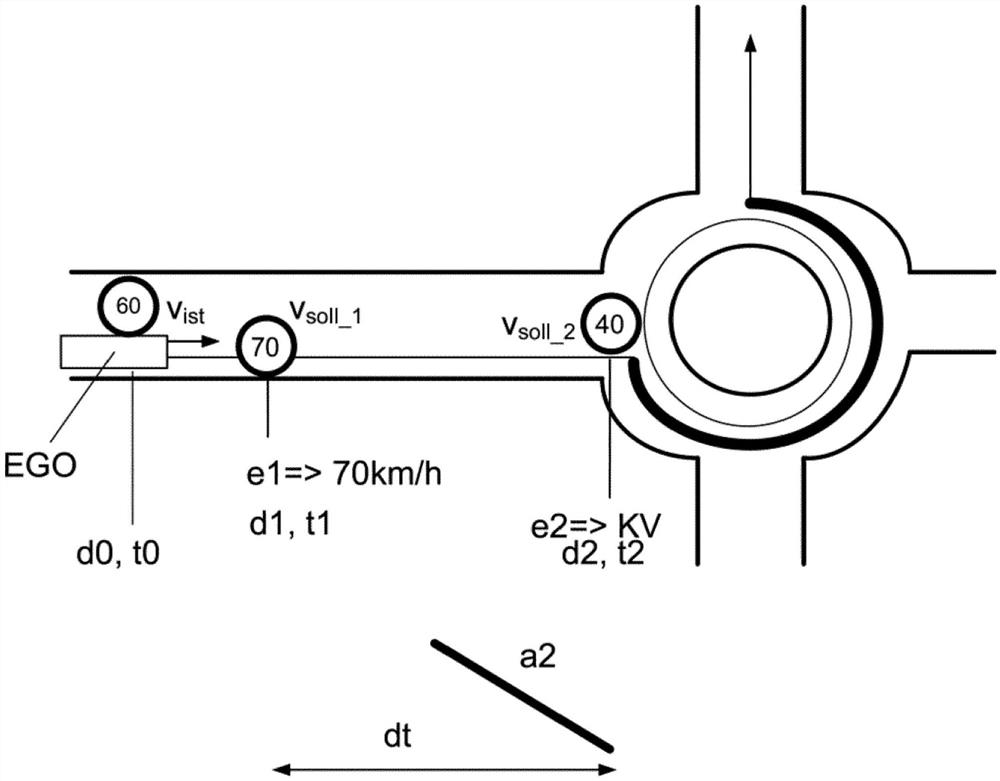
图3示出了如下的交通情况,在该交通情况中,在时间点t0或在地点d0,配备有根据本发明的系统的车辆EGO基于活跃的巡航控制以例如60km/h的实际速度向环岛KV行驶。在时间点t1或在地点d1,可以识别出呈交通标志形式的第一事件e1,通过该第一事件e1允许提高的目标速度v
第二事件e2在此涉及在时间点t2或在地点d2处驶入环岛KV。降低的目标速度v
在此不必调整加速特性a1,因为基于地点d1或时间点t1处的提高的目标速度v
图4示出了如下的交通情况,在该交通情况中,配备有根据本发明的系统的车辆EGO基于活跃的巡航控制以例如是130km/h的速度v
根据被激活的导航已知的是,车辆将在下一出口AF处以相对较急的弯道半径离开高速公路AB。例如60km/h的限速标志位于时间点t2或出口起点的地点d2处,或者该速度基于危急程度而被预设为降低的目标速度。该速度限制对应于事件e2。
为了防止车辆EGO在高速公路AB上就过早减速进而导致后面的交通也减速,将在功能单元FE中激活特殊情况功能SS。这仅从时间点t3起或从地点d3起才根据预设的减速潜力a2降低实际速度v
因此,在识别到如下的第一事件e1时并且在识别到后续的如下的第二事件e2时会激活特殊情况功能SS,基于实际速度v
按照图4的根据本发明的改进方案(特殊情况功能)基于以下基本考虑:
针对弯道、转弯、限速或环岛的常规预测性调节通常会非常舒适地且提早地开始进行调节。这在出口情况下是不合适的,因为可能会(严重)阻碍后面的交通。通常,对于在一般具有减速带的高速公路或类似于高速公路的道路上的出口,在手动纵向引导运行下会以显著提高的速度驶近该减速带,然后减速。在出口情况下的这种提高的动态特性并没有体现在当前的现有技术中,并且被认为阻碍了交通流,
因此,根据本发明,在接近高速公路出口时,首先禁止针对位于减速带之后的事件的调节。取而代之,针对减速带的起点,将可应用的出口速度存储为(虚拟的)降低的目标速度,并且通过可应用的特殊情况功能减速到该(虚拟的)降低的目标速度。如果到达了减速带的起点,则又将允许针对后续事件进行调节。例外情况是,到后续事件的减速度在数值上明显大于可应用的出口减速度。在这种情况下,允许在到达减速带之前减速到该事件。在此,仅当在减速带结束后的特定时间间隔内存在目标速度低于出口速度的事件时,才针对减速带进行动态预调节。
由此,在具有减速带的高速公路或类似于高速公路的道路上实现了更加动态的行驶,其适于其余道路使用者的驾驶行为。为了不阻碍交通流,必须显著减少对自动纵向引导运行的超控。
在图5中解释了功能单元FE中的扩展事件选择EA的工作方式,由此当在预设的考虑时间段Δt中彼此相对接近的事件e
在扩展事件选择EA中,优选地在预设的考虑时间段Δt中,附加地仅选择相对于相应的先前事件e
此外,优选地在扩展事件选择EA中,在预设的考虑时间段Δt中,仅选择对于相应的先前事件e
附加地,必须可以以预设的减速潜力a2在相应事件的取决于地点的时间点处依次到达所有事件e
优选地——特别是当在显示-操作单元ABE的提示系统HS中显示所选择的事件时——取消选择如下的事件,以免使驾驶员感到困惑,这样的事件的后续事件位于非常短的可应用的最小显示时间间隔内。
最后,优选地选择如下的事件,并且可选地将其显示在提示系统HS上,这样的事件是具有由此得出最小的降低的目标速度v
在图5中例如由上述调节得出最小的降低的目标速度v
按照图5的根据本发明的改进方案(扩展事件选择)基于以下基本考虑:
如果在道路路线上在短时间内接连存在多个事件或“Events”,则将以提示显示的形式依次向驾驶员呈现这些事件,并且这些事件依次被调节。在此,会导致提示显示的快速切换,这可能会使驾驶员感到困惑。相应的调节将导致不平稳的驾驶行为。
根据本发明扩展选择的事件实现对驾驶员而言合理且可理解的、对事件的提示显示,并且使得向驾驶员呈现的提示显示平稳。不会产生混淆,并且促使驾驶员对自动纵向控制系统更有信心。此外,实现了提示显示和事件调节的独立性。
为了完整起见,最后应当提及的是,根据本发明的纵向引导驾驶员辅助系统不仅可以用于巡航控制系统,而且可以在纵向引导中用于其他类型的驾驶员辅助。因此,纵向引导驾驶员辅助系统例如还可以被设计为限速系统,其中可以预设最大允许的限制速度,并且功能单元被设置为通过驱动部的相应驱控防止超过预设的或设置的最大允许速度。
- 运行机动车中纵向引导的驾驶员辅助系统的方法和机动车
- 机动车中的纵向引导的驾驶员辅助系统