一种基于奇异值分解的人造板表面缺陷检测方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及一种利用奇异值分解的人造板表面缺陷检测方法,属于数字图像处理应用领域。
背景技术
随着人造板连续压机生产线技术的不断成熟,人造板自动生产水平不断提高,但末端的表面缺陷检测依然以人工肉眼识别为主。人工肉眼检测的方式存在许多不足,如识别率不高、检测效率低下以及易受外界因素的影响等,且长时间的工作不利于工人们的身体健康。研发自动识别缺陷系统已成为行业的迫切需要。利用机器视觉的检测方法是自动检测人造板表面缺陷的一种可行方法。
基于机器视觉的人造板表面缺陷检测系统中,表面缺陷检测算法是关键技术之一,通过某种算法对人造板图像进行分析,快速准确找到不同纹理背景下的缺陷。现阶段,主要的缺陷检测算法有贝叶斯、神经网络、支持向量机(SVM)、决策树(DT)、聚类等,取得较好的成果。贝叶斯分类方法需要计算出先验概率;神经网络,支持向量机分类算法存在计算量大、复杂、实时性不高;聚类算法采用穷举的方法计算量较大;DT决策树在训练模型的时候容易过拟合,以上算法均不适用于人造板在线表面缺陷检测。
本发明提供了一种基于奇异值分解的人造板表面缺陷检测方法,该方法不需要离线训练模型,计算简单,实时性高,符合人造板表面缺陷在线检测的要求。
发明内容
本发明的目的在于能够快速高效地检测人造板表面缺陷,从而能够提供一种能适应在线检测的人造板质量控制方法,以解决传统人工肉眼检测人造板表面缺陷误检率和漏检率高,易造成工人视觉疲劳等不足。本发明利用奇异值分解表征人造板表面纹理特性,有效地提取人造板表面缺陷,相比现有方法,在实时性方面有着明显优势。
本发明的目的是通过以下技术方案实现的:
本发明的一种基于奇异值分解的人造板表面缺陷检测方法,具体包括以下步骤:
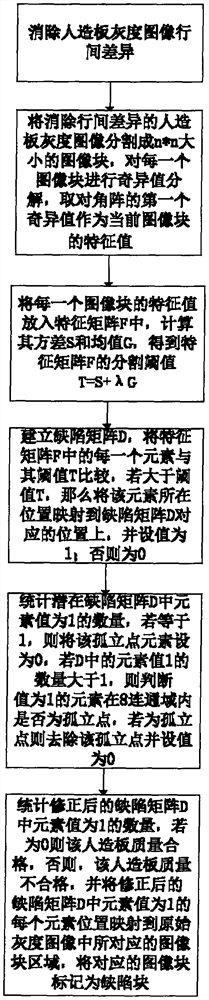
S1:对线阵相机拍摄的人造板原始灰度图像I
其中M,N分别为原始灰度图像I
S2:将步骤S1得到的消除行间差异的灰度图像I分割成横纵坐标大小为n图像块。考虑到原始灰度图像I
I
其中I
取所述对角阵∑中的第一个奇异值σ
S3:将步骤S2中的每一个图像块的特征值存入特征矩阵F,其分布形式如下表示:
其中,X=INT(M/n)+1为原始灰度图像分割后,在纵向方向上的图像块个数;相应地,Y=INT(N/n)+1是在横向方向上的图像块个数。INT(·)为取整运算。统计出特征矩阵F的方差S和均值G,得到特征矩阵F的分割阈值T,T满足:
T=S+λG,其中λ取经验值3~5
S4:根据特征矩阵F的行列维数,建立一个潜在缺陷矩阵D。将特征矩阵F中的每一个元素值f
S5:为进一步消除噪声干扰带来的误检可能,对潜在缺陷矩阵D中每一个元素值d
S6:统计修正后的缺陷矩阵D’中元素值为1的数量。如果数量为0,则判定当前待检测人造板表面不存在缺陷,即为合格人造板;否则判定当前待检测人造板表面存在缺陷,即为非合格人造板,同时将修正后的缺陷矩阵D’中元素值为1的每个位置点映射到原始灰度图像I
有益效果:
本发明提供了一种基于奇异值分解的人造板表面缺陷检测方法,通过上述步骤,结合奇异值分解去相关性的思路,对人造板表面缺陷进行检测,保证了缺陷检测的准确性。本发明计算简单,准确性高,能替代人造板生产过程中的人工检测环节,提高人造板质量控制能力,同时可降低劳动力成本。
附图说明
图1是本发明检测方法的流程图;
图2是实施例中某人造板原始灰度图像;
图3是实施例中某人造板消除行间差异的灰度图像;
图4是实施例中对消除行间差异的灰度图像进行分割的示意图;
图5是实施例中特征矩阵的三维显示图;
图6是实施例中潜在缺陷矩阵的分布情况图;
图7是实施例中的缺陷检测标定图像。
具体实施方式
下面结合附图和实施例对本发明的内容作进一步描述
实施例
以实际生产中检测某人造板为例,采用本发明提供的一种基于奇异值分解的人造板表面缺陷检测方法,具体流程如图1所示,具体包括以下步骤:
S1:通过线阵相机拍摄人造板,得到原始灰度图像I
其中M,N分别为原始灰度图像I
S2:将步骤S1得到的消除行间差异的灰度图像I分割成许多横纵坐标大小为n图像块,n为32,其分割方式如图4所示;然后对每一个图像块进行奇异值分解,其分解形式为:
I
其中I
取所述对角阵∑中的第一个奇异值σ
S3:将步骤S2中的每一个图像块的特征值存入特征矩阵F,其所述特征矩阵F的三维显示图如图5所示,其分布形式如下表示:
其中,X=INT(M/n)+1为原始灰度图像分割后,在纵向方向上的图像块个数;相应地,Y=INT(N/n)+1是在横向方向上的图像块个数。INT(·)为取整运算。
这里取M=1664,N=640,n=32。
统计出特征矩阵F的方差S和均值G,得到特征矩阵F的分割阈值T,T满足:
T=S+λG,这里λ取经验值3.5。
S4:根据特征矩阵F的行列维数,建立一个潜在缺陷矩阵D。将特征矩阵F中的每一个元素值f
S5:为进一步消除噪声干扰带来的误检可能,对潜在缺陷矩阵D中每一个元素值d
S6:统计修正后的缺陷矩阵D’中元素值为1的数量。如果数量为0,则判定当前待检测人造板表面不存在缺陷,即为合格人造板;否则判定当前待检测人造板表面存在缺陷,即为非合格人造板,同时将修正后的缺陷矩阵D’中元素值为1的每个位置点映射到原始灰度图像I
- 一种基于奇异值分解的人造板表面缺陷检测方法
- 一种人造板表面缺陷检测方法及其系统