一种路牌辅助标识及街道命名方法
文献发布时间:2023-06-19 11:03:41
技术领域
本发明属于一种街道的命名方法,是借用坐标系的概念,配合特别规则,以显示街道相对位置的命名方法,尤其涉标识及一种城市街道坐标体系命名方法。
背景技术
城市在快速发展,但街道的命名却大都沿用着历史的、随意的、无序的方法,这使人们在没有GPS 的情况下,找寻目的地比较困难。本发明是引入虚拟的坐标体系为基础,加上一些特殊的定义来命名城市街道。此方法现实中没有,专利文献库也没有查到,所以本发明属于创新。
发明内容
本发明是引入虚拟的相对坐标体系为基础,给街道加注辅助标识或命名城区街道,使得行路人依据街道路牌就可以知道自己在城市中的相对位置,并能推断前往目的地的方向,或者相距几个街区,或者大致距离等,方便出行。
本发明的点包括:一是以图像显示街道的形状和其所在的坐标系的象限,二是设置虚拟的辅助线划分街道与原点或坐标轴的距离顺序并依该顺序给街道编号,三是依街道的方向和形态给街道以大写字母命名,四是标明了街道起点或终点或街道本身与其他街道的位置或方向的关系,五是把上述四点发明点组合在一起。
且无论城市未来怎样扩展,本坐标命名法仍然可以适用。本命名法尤其适用于街道以正向垂直交叉为主的城市和新建城市或城区。
本发明是以下方式实现的:
一)是把需要命名的城市建立在虚拟的相对坐标体系之中。设定城市中心附近的已有的著名地标作为坐标系的原点;或依据城市主体道路作为坐标基轴,再以横轴与纵轴交叉点作为原点;以四个象限为分区,作为命名街道的基础;坐标系中不同象限用不同字母或不同数字或者用图示来表示,街道所处的象限用罗马数字Ⅰ、Ⅱ、Ⅲ、Ⅳ显示在街道标牌中,作为辅助标识。
二)原点的右侧横轴定义为E轴或汉字“东”、原点的左侧横轴定义为W轴或汉字“西”、原点的上部纵轴定义为N轴或汉字“北”、原点的下部纵轴定义为S轴或汉字“南”;上述四个轴以图示显示在街道标牌中,作为辅助标识;
坐标轴的形态和横轴与纵轴两者的关系,根据城市主体道路的实际情况,而不是基于几何理念。
三) 是同一条街道,将其端点距离坐标轴或距离原点近的一端,定义为入口,其端点距离坐标轴或距离原点远的另一端定义为出口;单行街道根据实际行进方向确定命名的出入口;其中入口记录在前,出口记录在后。
四)是街道的分类:在相对坐标命名体系里,街道依据走势和形态划分类别;这里,街道 也称为线或线形。
四a)是把平行于横轴的或街道主体接近平行于横轴的线,定义为N线或S线,其中横轴以上的Ⅰ、Ⅱ象限的定义为N线,横轴以下的Ⅲ、Ⅳ象限的定义为S线;把平行于纵轴的或街道主体接近平行于纵轴的线,定义为E或W线,其中纵轴以右的在Ⅰ、Ⅳ象限的定义为E线,纵轴以左的在Ⅱ、Ⅲ象限的定义为W线;把E、N、W、S统称为直线。
四b)是把明显偏离N和S方向或明显偏离E和W方向的,并且接近于直的街道称为(直的)斜线,定义为L线。
四c)是把明显弯曲的街道,称为弯线,定义为C线。
四d)是把现实中转盘类街道称为环形街道,定义为Q线。
四e)是在交叉路口,有多于四条以上街道,从一个环形Q线放射状发出,称为放射状线,定义为K线。
四f)是把出口端点与其他线无交叉点的街道,称作断头线,定义为D线。
五)是街道的命名规则中,同类型街道的排列序号,定义了街道所在大致的相对位置。其中,直线E、N、W、S的序号取决于与坐标轴的相对位置,L线和C线取决于其入口与原点或坐标轴的位置,Q线取决于其环形圆心与原点或坐标轴的位置,K线取决于其与所关联的Q线的位置关系。
五a) 是从原点向上,把距离横轴(W轴+E轴)最近的一条街道或者一组街道定义为N1,再把距离N1最近的一条街道或者一组街道定义为N2;其余依次类推。
五b)是从原点向下,把距离横轴(W轴+E轴)最近的一条街道或者一组街道定义为S1,再把距离S1最近的一条街道或者一组街道定义为S2;其余依次类推。
五c)是从原点向右,把距离纵轴(N轴+ S轴)最近的一条街道或者一组街道定义为E1,再把距离E1最近的一条街道或者一组街道定义为E2;其余依次类推。
五d)是从原点向左,把距离纵轴(N轴+S轴)最近的一条街道或者一组街道定义为W1,再把距离W1最近的一条街道或者一组街道定义为W2;其余依次类推。
五e )是斜向街道 L线依据入口的位置序号从所在象限的原点由近及远依次定义为L1、L2、L3……;当出现距离原点差不多相同距离的多条L线时,依据逆时针方向,从所在象限的一个基轴依次按照离原点等距离半径的圆弧形方向排序;具体在第Ⅰ象限从E轴依次到N轴,在第Ⅱ象限从N轴依次到W轴,在第Ⅲ象限从W轴依次到S轴,在第Ⅳ象限从S轴依次到E轴;当有同方向的紧邻的并列街道,可能入口并不一致,但为了方便应用,可以考虑集中排序为相近序号。
五f) 是弯曲 C线依据入口的位置,排序方法同L线。
五g)是环状Q线依据其圆环的中心所在的位置,排序方法同L线。
五h)是放射状K线的命名序号依据所关联的Q线:环绕Q发射状的多条K线,从第Ⅰ象限到第Ⅳ象限沿着逆时针方向排序,依次定义为K1、K2、K3…… 。
六)是直线街道N、S、W、E在四个象限的分别命名:
六a)是规定在第Ⅰ象限的,平行或接近平行于横轴的街道,从E轴向上方向依次排序,表示为ⅠNx:Ey+n;平行或接近平行于纵轴的道路,从N轴向右方向依次排序,表示为ⅠEx:Ny+n。
六b)是规定在第Ⅱ象限的,平行或接近平行于横轴的街道,从W轴向上方向依次排序,表示为 ⅡNx:Wy+n;平行或接近平行于纵轴的道路,从N轴向左方向依次排序,表示为ⅡWx:Ny+n。
六c )是规定在第Ⅲ象限的,平行或接近平行于横轴的街道,从W轴向下方向依次排序,表示为ⅢSx:Wy+n;平行或接近平行于纵轴的街道,从S轴向左方向依次排序,表示为ⅢWx:Sy+n。
六d)是规定在第Ⅳ象限的,平行或接近平行于横轴的街道,从E轴向下方向依次排序,表示为ⅣSx:Ey+n;平行或接近平行于纵轴的街道,从S轴向右方向依次排序,表示为ⅣEx:Sy+n。
六e)是其中x、y代表从1到无限大阿拉伯数字顺序号,其中n代表数字,+n代表街道的起点从序号为y街开始,到终点结束时,经过n个交叉路口。
七)是斜线街道L线命名原则上参照E、N、W、S线的方法,用象限符号加上Lx:Ey+n、Lx:Ny+n、 Lx:Wy+n、Lx:Sy+n形式命名。在实施中,依据L线的倾斜方向,比如横向倾斜的L线,因为可能会与纵向街道有更多的交叉点,所以应该采用Lx:Ey+n,Lx:Sy+n的方法命名;而纵向倾斜的L线,因为可能会与横向街道有更多的交叉点,所以应该采用Lx:Ny+n,Lx:Sy+n的方法命名;接近象限角分线(大致45度角左右)的斜线可以灵活参考纵或横坐标;L线命名中,如果在选择入口参考坐标时,没有实际横向或纵向可以直接关联的街道,可采用相近的横向或纵向街道的延长线作为辅助参照坐标; 当找不到合适的横向或纵向作为参照时,也可用实际相交的L、K、Q、C等线作为参照命名。
八)是弯曲街道C的命名方法,与L线的命名规则相同。
九)是环形街道Q命名,原则上依据环形的圆心坐标位置来定义命名,表示为 ⅠQx:EyNz、ⅡQx:WyNz 、ⅢQx:WySz、ⅣQx:EySz形式。
十)是放射状街道K线命名:依据其相关联的Qx,定义为象限号加上Qx'Kn标示,Qx'右上角的一撇表示Kn与Qx的关联关系。
十一)是一般情况下,街道从入口到出口的方向都是与基轴的方向正相关,即 +n是表示相对于原点沿着基轴方向远离了n个街口;但在负相关时,比如有的单行街道入口反比出口距离坐标原点更远,这时要用 -n标示。
十二)是跨象限街道的命名:当命名跨越两个或更多象限的街道时,选取街道主体所在的象限符号或街道入口所在的象限符号,并分别把在多个象限的命名并列标示。
十三)是对于夹在两条已经命名过的街道之间的短街道或特殊街道,依距离接近平行的坐标轴从近到远的顺序,使用小写英文字母区别。
十四)是在遇有交叉路口距离太远时,排列街道与原点或坐标轴距离顺序时,预留可能新建的道路序号。
十五)是在遇有新建城区时,以规划中的中心做原点,按照上述规则命名即可。
附图说明
用附图对应表格就三个实施例对本发明做具体说明:图1 是相对坐标命名法中基本概念的图示,包括坐标、原点、象限、参照地标等基本要素以及主要基本线形;图2 是北京城区典型街道的命名实施范例,为清晰起见,添加了一个细部小图;图3 是斜线L线的命名排序方法范例;图 4是上海城区典型街道的命名实施范例;图5是法国巴黎典型街道的命名实施范例。
优选实施例
三个实施例分别选取了北京,上海,法国巴黎三个典型城区街道,并且用五个附图和五个表格一一对应,逐项说明在不同类型城区街道中,本发明内容中的路牌辅助标识及道路命名的实施方法。
实施例1:(1a)如附图1对应表1所示,以北京城区为例,选择天安门作为原点,长安街作为横轴,北京城中轴线做纵轴,北京站作为参照地标,建立相对坐标体系命名法的实施基础。图1标明了坐标、原点、象限、参照地标等基本要素以及典型基本线形;(1b)如附图2对应表2所示:在图1的基础上,具体以北京城区第Ⅰ象限为例,图示了北京城区典型街道的命名实施范例。列出实际的道路名称以及对应的使用坐标系法命名的名称,并附注了对应发明内容中的定义规则序号索引;(1c)如附图3对应表3所示:借用图2的北京城区第一象限,只就其中的斜线单独排序,并在表3中列出与图2和表2中对应街道的命名实施范例,具体说明图2中斜线L街道的排序是依据图3的方法,把距离原点近的一端作为入口,并依据入口距离原点由近及远增大序号来命名同类型街道。附图例依据天地图北京地图https://map.bmcx.com/大致描图,参照比例2km/1mi。
实施例1命名的详细方法和名称见下面表1、表2、表 3
表1 坐标轴、原点、象限、参照地标及基本线形(对应附图1)
表2北京城区典型街道命名实施(对应附图2)
表3斜街L线的命名排序实施(对应附图3)
实施例2:与实施例1基本相同,所不同的本实例命名的城市是上海。其特点是坐标轴的设置随着主城区的走势变化,不再是正南正北,街道也多是弯曲的。如附图4对应表4所示,本实例选取上海延安高架桥和南北高架桥作为相对坐标的横轴和纵轴,两轴交点作为参照坐标的原点,再将这个坐标顺时针大致旋转24度角,以此为基础,建立上海城区的虚拟相对坐标系,并图示了上海城区典型街道命名实施方法。通过拟平拟直处理,具体解决了非正向非平直城市街道在坐标体系命名中的实施方法。附图例依据天地图上海地图https://map.bmcx.com/大致描图,参照比例500m/2000ft。
实施例2的命名规则和名称见下表4:上海城区典型街道命名实施例(顺时针旋转24度角)(对应附图4)
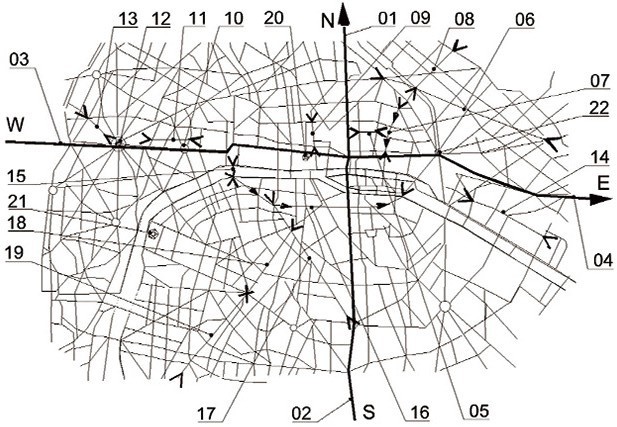
实施例3:以法国巴黎城区为范例,具体示范了以转盘街和短的斜街居多为特点的城区街道,在坐标体系命名法中的实施方法。如附图5对应表5所示,选取【里沃利街+Rue duFaubourg Saint-Antoiine/圣安托万福堡街+Av Daumesnil】作为相对坐标的横向E轴,【大军团大街+香榭丽舍大街+里沃利街】作为相对坐标的横向W轴,【 Boulevard de Se'bastopol/赛巴斯托波尔大道】作为相对坐标的纵向N轴,【Boulevard de Saint-Michel/圣米歇尔大道】作为相对坐标的纵向S轴,两轴交点作为坐标原点,再把坐标逆时针大致旋转26度角,建立巴黎的虚拟相对坐标,以此为基础,示范说明法国巴黎城区街道命名具体实施方法。附图例依据谷歌地图巴黎地图https://map.bmcx.com/大致描图,比例参照500m/2000ft。
实施例3的命名规则及名称见下表5:巴黎城区典型街道命名实施例(逆时针旋转26度角)(对应附图5)
- 一种路牌辅助标识及街道命名方法
- 一种方便进行拆卸维护的路牌标识装置