一种化工生产污水管道除堵智能机器人及其除堵方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及管道清洁领域,更具体地说,涉及一种化工生产污水管道除堵智能机器人及其除堵方法。
背景技术
化工污染是指化学工业生产过程中产生的废气、污染物等,这些废物在一定浓度以上大多是有害的,有的还是剧毒物质,进入环境就会造成污染。有些化工产品在使用过程中又会引起一些污染,甚至比生产本身所造成的污染更为严重、更为广泛。
然而,目前市场上管道疏通清理用的智能机器人大多都是固定式的,只能对一种大小型号的管道进行疏通清理,适用性较为低下,难以满足当代市场需求,而且普通轮式或者是履带式在管道中行走无法完全贴合管壁,容易造成清理设备不能更好对堵塞位置进行清理。
发明内容
1.要解决的技术问题
针对现有技术中存在的问题,本发明的目的在于提供一种化工生产污水管道除堵智能机器人,本方案通过设置管轮机构,通过采用外小内大的圆台形外毂加装在内毂外侧,并在外毂的外侧设置外包胶圈,构成的轮体倾斜曲面可以更好的与管子内部进行贴合,由于在外包胶圈上设置防滑凸条可以提高机器人的稳定性,从而可以更好的对堵塞物进行稳定性清理。
2.技术方案
为解决上述问题,本发明采用如下的技术方案。
一种化工生产污水管道除堵智能机器人,包括不锈钢机壳、隔板、轴动机构、第二电机和清洗机构,所述不锈钢机壳的下端固定连接有探摄机构,所述不锈钢机壳的内侧固定连接有隔板,所述不锈钢机壳的内侧底部设有轴动机构,所述轴动机构设在隔板的下方,所述轴动机构的外车固定连接有管轮机构,所述不锈钢机壳的内侧设有清洗机构,所述隔板的上端固定连接有第二电机,所述第二电机的输出端贯穿不锈钢机壳固定连接主动轴,所述主动轴的另一端固定连接有集料盒,所述集料盒的外侧设有排料口,所述集料盒的外侧固定连接有调节机构,所述集料盒的左侧分别设有旋刀组件和破壁刀具组件,所述集料盒的内侧设有搅拌机构;
所述管轮机构包括防滑凸条、外包胶圈、外毂和内毂,所述轴动机构的外侧固定连接有内毂,所述内毂的外侧固定连接有外毂,所述外毂的外侧被外包胶圈所覆盖,所述外包胶圈的外侧固定连接有防滑凸条;
所述调节机构包括第一套管、伸缩推块、第二套管、弹簧和管壁削刀,所述调节机构和管壁削刀之间设有固定组件,所述集料盒的外侧固定连接有第二套管,所述固定组件的外侧固定连接有第一套管,所述第二套管的内部固定连接有弹簧,所述弹簧的另一端固定连接有伸缩推块,所述伸缩推块的另一端与第一套管为活动连接。
进一步的,所述轴动机构包括第一锥形齿、第二锥形齿、轮轴和第一电机,所述不锈钢机壳的内侧底部固定连接有第一电机,所述第一电机的输出端固定连接有第二锥形齿,所述不锈钢机壳的内部转动连接有轮轴,所述轮轴与内毂为固定连接,所述轮轴的外侧固定连接有第一锥形齿,所述第一锥形齿与第二锥形齿为啮合连接,通过在第一电机上设置第二锥形齿,传动轮轴上的第一锥形齿可以驱动轮轴为不锈钢机壳提供动力。
进一步的,所述固定组件包括螺母、放置槽、刀架和紧固螺栓,所述第一套管的外侧固定连接有刀架,所述刀架的内侧设有放置槽,所述刀架的外侧螺纹连接有紧固螺栓,所述紧固螺栓的另一端均贯穿放置槽和管壁削刀,所述紧固螺栓的另一端贯穿放置槽螺纹连接有螺母,通过在刀架上设置放置槽利用螺母和锁紧螺栓进行固定可以方便更换刀架上的刀具。
进一步的,所述清洗机构包括水箱、水泵、水流管和喷头,所述隔板的内侧固定连接有水箱,所述水箱的上端固定连接有水泵,所述水泵的外侧固定连接有水流管,所述水流管的一端伸入水箱的内侧,所述水流管的另一端贯穿不锈钢机壳的上端固定连接有压头机构,所述水流管的另一端贯穿压头机构固定连接有喷头,所述喷头的与压头机构为固定连接,通过水泵将水箱内的水通过水流管输送到喷头,可以对管子内壁进行清洗。
进一步的,所述压头机构包括管头卡块、定位板、固定套圈和缺口管座,所述不锈钢机壳的上端固定连接有缺口管座,所述缺口管座的内侧固定连接有定位板,所述定位板的下端固定连接有固定套圈,所述固定套圈的内侧固定连接有水流管,所述定位板的上端固定连接有管头卡块,所述水流管的另一端贯穿管头卡块,通过在不锈钢机壳上设置缺口管座,将水流管身通过定位板下方的固定套圈进行固定,并将水流管通过管头卡块与缺口管座进行进一步固定便于对水流管与喷头的朝向进行固定。
进一步的,所述探摄机构包括底座、安装架、LED灯和探头,所述不锈钢机壳的下端固定连接有底座,所述底座的外侧固定连接有安装架,所述安装架的外侧固定连接有LED灯,所述安装架的内侧转动连接有探头,通过在不锈钢机壳的下方设置底座,并且在底座上设置安装架,利用安装架安装探头与LED灯,可以方便对管子内部的情况进行掌握,便于对堵塞位置进行及时的清理。
进一步的,所述破壁刀具组件包括螺纹杆、锁紧胶垫、刀座和锯齿刀口,所述集料盒的外侧螺纹连接有螺纹杆,所述螺纹杆的外侧固定连接有刀座,所述刀座的另一端固定连接有锯齿刀口,所述螺纹杆与刀座之间设有锁紧胶垫,通过设置螺纹杆,通过在集料盒的外侧设置带有刀座的锯齿刀口,并利用锁紧胶垫进行紧固,一方面可以方便刀具更换,另一方面利用锯齿刀口可以对较硬的堵塞物进行切割。
进一步的,所述旋刀组件包括旋刀刃口、废料输出腔和刀内腔,所述集料盒的外侧固定连接有刀内腔,所述刀内腔的外侧固定连接有旋刀刃口,所述旋刀刃口和刀内腔之间设有废料输出腔,通过在集料盒上设置刀内腔与旋刃口,通过旋刀刃口可以将堵塞物刮干净,通过旋刀刃口与刀内腔之间的废料输出腔进行收集。
进一步的,所述搅拌机构包括螺旋叶圈、搅拌棒、第一齿轮和第二齿轮,所述不锈钢机壳的内侧转动连接有搅拌棒,所述搅拌棒的另一端伸入集料盒的内侧固定连接有螺旋叶圈,所述搅拌棒的外侧固定连接有第一齿轮,所述主动轴的外侧固定连接有第二齿轮,所述第一齿轮与第二齿轮为啮合连接,通过设置在集料盒上设置搅拌棒,利用主动轴上的第二齿轮驱动搅拌棒上的第一齿轮转动,使搅拌棒带动螺旋叶圈在集料盒内转动,可以加快集料盒内部的堵塞物废料进行细化排出集料盒。
一种化工生产污水管道除堵方法,使用了如权利要求1-6任一项所述的一种化工生产污水管道除堵智能机器人。
3.有益效果
相比于现有技术,本发明的优点在于:
(1)本方案通过设置管轮机构,通过采用外小内大的圆台形外毂加装在内毂外侧,并在外毂的外侧设置外包胶圈,构成的轮体倾斜曲面可以更好的与管子内部进行贴合,由于在外包胶圈上设置防滑凸条可以提高机器人的稳定性,从而可以更好的对堵塞物进行稳定性清理。
(2)本方案通过设置调节机构,当机器人在管子内部时,通过在转动的集料盒上设置第二套管,而第二套管通过内部安装的弹簧伸缩推动弹簧上的伸缩推块顶动第一套管与管子的内侧壁贴合,从而可以根据管子的口径进行调节,可以对管道内壁上的污物进行切削,进而对管道快速的进行疏通,提高了工作效率低。
(3)本方案通过设置的清洗机构,通过水泵将水箱内的水通过水流管输送到喷头,配合压头机构,将水流管身通过定位板下方的固定套圈进行固定,并将水流管通过管头卡块与缺口管座进行进一步固定便于对水流管与喷头的朝向进行固定,从而可以实现对管子内壁进行定位清洗。
(4)本方案通过设置的探摄机构,通过不锈钢机壳的下方设置底座,并且在底座上设置安装架,利用安装架安装探头与LED灯,可以方便对管子内部的情况进行掌握,便于对堵塞位置进行及时的清理。
(5)本方案通过设置的搅拌机构,通过利用主动轴上的第二齿轮驱动搅拌棒上的第一齿轮转动,使搅拌棒带动螺旋叶圈在集料盒内转动,可以加快集料盒内部的堵塞物废料进行细化排出集料盒。
(6)本方案通过设置的旋刀组件,通过旋刀刃口可以将堵塞物刮干净,通过旋刀刃口与刀内腔之间的废料输出腔进行收集,配合破壁刀具的设置可以将堵塞口处的硬化物快速切割,从而可以提高机器人的防堵性能。
附图说明
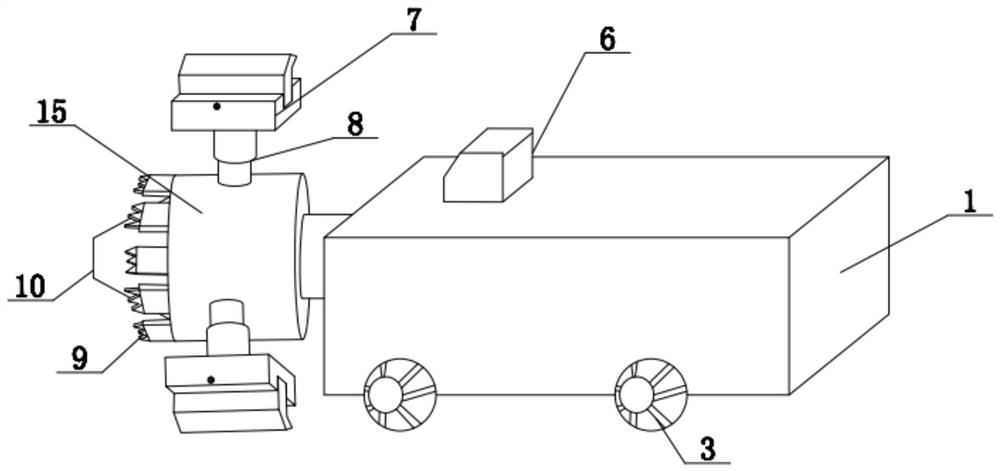
图1为本发明的结构示意图;
图2为本发明的内部机构示意图;
图3为本发明的管壁削刀的立体图;
图4为本发明的缺口管座的立体图;
图5为本发明的搅拌机构的结构放大效果图;
图6为本发明的探摄机构的结构放大效果图;
图7为本发明的固定组件的内部结构示意图;
图8为本发明的旋刀刃口的左视图;
图9为本发明的破壁刀具组件的内部结构示意图;
图10为本发明的轴动机构的内部结构示意图;
图11为本发明的管轮机构的内部结构示意图。
图中标号说明:
1、不锈钢机壳;2、轴动机构;3、管轮机构;4、探摄机构;5、清洗机构;6、压头机构;7、固定组件;8、调节机构;9、破壁刀具组件;10、旋刀组件;11、搅拌机构;12、隔板;13、第二电机;14、主动轴;15、集料盒;16、排料口;101、旋刀刃口;102、废料输出腔;103、刀内腔;201、轮轴;202、第一锥形齿;203、第二锥形齿;204、第一电机;301、防滑凸条;302、外包胶圈;303、外毂;304、内毂;401、底座;402、安装架;403、LED灯;404、探头;501、水箱;502、水泵;503、水流管;504、喷头;601、管头卡块;602、定位板;603、固定套圈;604、缺口管座;701、螺母;702、放置槽;703、紧固螺栓;704、刀架;801、第一套管;802、伸缩推块;803、第二套管;804、弹簧;805、管壁削刀;901、螺纹杆;902、锁紧胶垫;903、刀座;904、锯齿刀口;111、螺旋叶圈;112、搅拌棒;113、第一齿轮;114、第二齿轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
请参阅图1-图11,一种化工生产污水管道除堵智能机器人,包括不锈钢机壳1、隔板12、轴动机构2、第二电机13和清洗机构5,所述不锈钢机壳1的下端固定连接有探摄机构4,所述不锈钢机壳1的内侧固定连接有隔板12,所述不锈钢机壳1的内侧底部设有轴动机构2,所述轴动机构2设在隔板12的下方,所述轴动机构2的外车固定连接有管轮机构3,所述不锈钢机壳1的内侧设有清洗机构5,所述隔板12的上端固定连接有第二电机13,所述第二电机13的输出端贯穿不锈钢机壳1固定连接主动轴14,所述主动轴14的另一端固定连接有集料盒15,所述集料盒15的外侧设有排料口16,所述集料盒15的外侧固定连接有调节机构8,所述集料盒15的左侧分别设有旋刀组件10和破壁刀具组件9,所述集料盒15的内侧设有搅拌机构11;
请参考图11,所述管轮机构3包括防滑凸条301、外包胶圈302、外毂303和内毂304,所述轴动机构2的外侧固定连接有内毂304,所述内毂304的外侧固定连接有外毂303,所述外毂303的外侧被外包胶圈302所覆盖,所述外包胶圈302的外侧固定连接有防滑凸条301,通过采用外小内大的圆台形外毂303加装在内毂304外侧,并在外毂303的外侧设置外包胶圈302,构成的轮体倾斜曲面可以更好的与管子内部进行贴合,由于在外包胶圈302上设置防滑凸条301可以提高机器人的稳定性;
请参考图2,所述调节机构8包括第一套管801、伸缩推块802、第二套管803、弹簧804和管壁削刀805,所述调节机构8和管壁削刀805之间设有固定组件7,所述集料盒15的外侧固定连接有第二套管803,所述固定组件7的外侧固定连接有第一套管801,所述第二套管803的内部固定连接有弹簧804,所述弹簧804的另一端固定连接有伸缩推块802,所述伸缩推块802的另一端与第一套管801为活动连接,通过在转动的集料盒15上设置第二套管803,而第二套管803通过内部安装的弹簧804伸缩推动弹簧804上的伸缩推块802顶动第一套管801与管子的内侧壁贴合,从而可以根据管子的口径进行调节,可以对管道内壁上的污物进行切削,进而对管道快速的进行疏通。
请参阅图10,所述轴动机构2包括第一锥形齿202、第二锥形齿203、轮轴201和第一电机204,轴动机构2设置在机器人的后驱位置,可以提高攀爬的动力,所述不锈钢机壳1的内侧底部固定连接有第一电机204,所述第一电机204的输出端固定连接有第二锥形齿203,所述不锈钢机壳1的内部转动连接有轮轴201,所述轮轴201与内毂304为固定连接,所述轮轴201的外侧固定连接有第一锥形齿202,所述第一锥形齿202与第二锥形齿203为啮合连接,通过在第一电机204上设置第二锥形齿203,传动轮轴201上的第一锥形齿202可以驱动轮轴201为不锈钢机壳1提供动力。
请参阅图3和图7,所述固定组件7包括螺母701、放置槽702、刀架704和紧固螺栓703,所述第一套管801的外侧固定连接有刀架704,所述刀架704的内侧设有放置槽702,所述刀架704的外侧螺纹连接有紧固螺栓703,所述紧固螺栓703的另一端均贯穿放置槽702和管壁削刀805,所述紧固螺栓703的另一端贯穿放置槽702螺纹连接有螺母701,通过设置固定组件7,利用螺母701和锁紧螺栓进行固定可以方便更换刀架704上的刀具。
请参阅图2和图4,所述清洗机构5包括水箱501、水泵502、水流管503和喷头504,所述隔板12的内侧固定连接有水箱501,所述水箱501的上端固定连接有水泵502,所述水泵502的外侧固定连接有水流管503,所述水流管503的一端伸入水箱501的内侧,所述水流管503的另一端贯穿不锈钢机壳1的上端固定连接有压头机构6,所述水流管503的另一端贯穿压头机构6固定连接有喷头504,所述喷头504的与压头机构6为固定连接,通过设置清洗机构5,可以方便对管子的内壁进行清洗。
请参阅图2,所述压头机构6包括管头卡块601、定位板602、固定套圈603和缺口管座604,所述不锈钢机壳1的上端固定连接有缺口管座604,所述缺口管座604的内侧固定连接有定位板602,所述定位板602的下端固定连接有固定套圈603,所述固定套圈603的内侧固定连接有水流管503,所述定位板602的上端固定连接有管头卡块601,所述水流管503的另一端贯穿管头卡块601,通过设置压头机构6,通过在不锈钢机壳1上设置缺口管座604,将水流管503身通过定位板602下方的固定套圈603进行固定,并将水流管503通过管头卡块601与缺口管座604进行进一步固定便于对水流管503与喷头504的朝向进行固定。
请参阅图6,所述探摄机构4包括底座401、安装架402、LED灯403和探头404,探摄机构4的外部均设有防腐耐磨镀层,可以提高管内做工的耐磨性和抗腐蚀性,进而提高机器人的使用寿命,所述不锈钢机壳1的下端固定连接有底座401,所述底座401的外侧固定连接有安装架402,所述安装架402的外侧固定连接有LED灯403,所述安装架402的内侧转动连接有探头404,通过在不锈钢机壳1上设置探摄机构4,利用安装架402安装探头404与LED灯403,可以方便对管子内部的情况进行掌握,便于对堵塞位置进行及时的清理。
请参阅图9,所述破壁刀具组件9包括螺纹杆901、锁紧胶垫902、刀座903和锯齿刀口904,所述集料盒15的外侧螺纹连接有螺纹杆901,所述螺纹杆901的外侧固定连接有刀座903,所述刀座903的另一端固定连接有锯齿刀口904,所述螺纹杆901与刀座903之间设有锁紧胶垫902,通过在集料盒15的外侧设置带有刀座903的锯齿刀口904,并利用锁紧胶垫902进行紧固,一方面可以方便刀具更换,另一方面利用锯齿刀口904可以对较硬的堵塞物进行切割,提高堵塞的疏通效率。
请参阅图8和图2,所述旋刀组件10包括旋刀刃口101、废料输出腔102和刀内腔103,所述集料盒15的外侧固定连接有刀内腔103,所述刀内腔103的外侧固定连接有旋刀刃口101,所述旋刀刃口101和刀内腔103之间设有废料输出腔102,过在集料盒15上设置刀内腔103与旋刃口,通过旋刀刃口101可以将堵塞物刮干净,通过旋刀刃口101与刀内腔103之间的废料输出腔102进行收集,从而可以增强对堵塞物的清理效率。
请参阅图5,所述搅拌机构11包括螺旋叶圈111、搅拌棒112、第一齿轮113和第二齿轮114,所述不锈钢机壳1的内侧转动连接有搅拌棒112,所述搅拌棒112的另一端伸入集料盒15的内侧固定连接有螺旋叶圈111,所述搅拌棒112的外侧固定连接有第一齿轮113,所述主动轴14的外侧固定连接有第二齿轮114,所述第一齿轮113与第二齿轮114为啮合连接,利用主动轴14上的第二齿轮114驱动搅拌棒112上的第一齿轮113转动,使搅拌棒112带动螺旋叶圈111在集料盒15内转动,可以加快集料盒15内部的堵塞物废料进行细化排出集料盒15,可以方便对堵塞物进行细化排出集料盒15。
本发明中的一种化工生产污水管道除堵智能机器人,工作原理如下:使用时,首先将机器人放入即将疏通的管子内,机器人通过轴动机构2向管子内部移动,由于机器人采用管轮机构3,外小内大的圆台形外毂303加装在内毂304外侧,并在外毂303的外侧设置外包胶圈302,构成的轮体倾斜曲面可以更好的与管子内部进行贴合,由于在外包胶圈302上设置防滑凸条301可以提高机器人的稳定性,移动的同时遇到管子内壁的堵塞物时,由于设置了调节机构8,通过在转动的集料盒15上设置第二套管803,而第二套管803通过内部安装的弹簧804伸缩推动弹簧804上的伸缩推块802顶动第一套管801与管子的内侧壁贴合,从而可以根据管子的口径进行调节,可以对管道内壁上的污物进行切削,进而对管道快速的进行疏通,同时配合清洗机构5的设置,通过水泵502将水箱501内的水通过水流管503输送到喷头504进行清洗,由于设置了压头机构6,将水流管503身通过定位板602下方的固定套圈603进行固定,并将水流管503通过管头卡块601与缺口管座604进行进一步固定便于对水流管503与喷头504的朝向进行固定,将水流管503身通过定位板602下方的固定套圈603进行固定,并将水流管503通过管头卡块601与缺口管座604进行进一步固定便于对水流管503与喷头504的朝向进行固定,从而可以实现对管子内壁进行定位清洗,而机器人由于安装了探摄机构4,通过在安装架402上安装探头404与LED灯403,可以方便对管子内部的情况进行掌握,当遇到坚硬的搁浅堵塞物时,由于设置了旋刀组件10,通过旋刀刃口101可以将堵塞物刮干净,通过旋刀刃口101与刀内腔103之间的废料输出腔102进行收集,配合破壁刀具的设置可以将堵塞口处的硬化物快速切割,而被收集的堵塞物碎屑进入集料盒15后,由于集料盒15内设置了搅拌机构11,利用主动轴14上的第二齿轮114驱动搅拌棒112上的第一齿轮113转动,使搅拌棒112带动螺旋叶圈111在集料盒15内转动,可以加快集料盒15内部的堵塞物废料进行细化排出集料盒15。
一种化工生产污水管道除堵方法,使用了如权利要求1-6任一项所述的一种化工生产污水管道除堵智能机器人。
以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
- 一种化工生产污水管道除堵智能机器人及其除堵方法
- 一种地下污水管道通堵检测装置及使用方法