一种基于毫米波雷达的动态目标的监测方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及一种基于毫米波雷达的动态目标的监测方法,具体涉及雷达信号地发送、收集以及预处理,多个毫米波雷达分布式组网三维定位等。
背景技术
近些年,家庭空巢化趋势与独居老人增多,能够实现远程实时居家监控的智能医疗设备需求量不断增加。年轻一代也正在成为慢性病大军,具有患病时间长、服务需求量大的特点,如何合理有效地进行中年慢性疾病的管理,成为目前社会广泛关注的话题。
毫米波雷达是一种具有高频带、窄波束、高抗干扰的雷达系统。在室内定位领域,不同于电红外、蓝牙、WIFI等传感器结合TOF和AOA等技术在准确性、误报和环境变化(如黑暗、亮度和烟雾)方面的局限性,基于毫米波雷达的室内人员定位和跌倒检测方法具有较强的穿透能力、非介入式传感、良好的隐私保护性,不易受环境因素(如天气、温度、光照等)影响等优势,可以在完全黑暗或明亮的白天工作。与可穿戴医疗设备相比,非接触式的毫米波雷达有效避免了因接触身体对人造成的不适,相比运动手环而言,毫米波雷达对检测到的数据运用更充分,具有较强的医疗价值,相比可穿戴医疗设备而言,毫米波雷达的灵活性更高,体验感更加舒适便捷,适用人群更广。在市场上也存在同样运用毫米波技术实现生命体征检测的产品,但是仍处于发展阶段,技术不够成熟,场景不够多元。
该方法涉及到利用毫米波雷达进行动态目标的监测,因而需要对采集到的数据进行计算分析。为了获取完整目标的方位信息,需要多个毫米波雷达分布式组网完成三维空间的定位。由于对三维定位的实时性要求较高,故寻求一种精度足够高,实时性较强的方法,能够快速完成雷达数据的采集计算分析,该方法为相关的人体定位的应用提供支持,以便后续很快地检测到老人摔倒或者出现其他异常情况时能够及时报警。
发明内容
为了更加高效便捷地采集毫米波雷达数据,同时也能为动态目标的定位实时提供原始数据,因而有必要提供了一种基于毫米波雷达的动态目标的监测方法。该方法的使用,能够较快完成差拍信号的获取、预处理、组网定位,具有较高精度、实时监测、抗干扰等优点。本发明的具体技术方案如下:
一种基于毫米波雷达的动态目标的监测方法,包括以下步骤:
S1:利用毫米波雷达发射线性调频信号f(t),经过回波信号R(t)与发射信号T(t)混频后得到基带的差拍信号ΔS(t);
S2:对得到的信号进行预处理去除寄生调幅干扰、正交混频镜像干扰;
S3:利用DFT对含有目标距离信息的差拍信号进行频率的估计,继而转化成距离的估计而实现目标的距离参数测量;
S4:多个毫米波雷达分布式组网实现目标的三维空间定位。
进一步的,S1中,所述利用毫米波雷达发射线性调频信号f(t),经过回波信号R(t)与发射信号T(t)混频后得到基带的差拍信号ΔS(t),包括:
毫米波雷达发射线性调频信号f(t);
发射信号T(t)和回波信号R(t)混频后得到基带的差拍信号ΔS(t)。
进一步的,S2,所述对得到的信号进行预处理,包括:
利用寄生调幅干扰波形相对稳定的特点,获取雷达空照时的差拍信号可以近似为寄生调幅信号;
采用主瓣能量大,旁瓣能量小的哈布斯窗函数抑制旁瓣对领近谱峰主瓣的影响,即正交混频镜像干扰。
进一步的,S3,所述对预处理后的差拍信号ΔS(t)进行N点DFT得到距离信息,其方式包括:
对ΔS(t)进行采样率fs的N点采样得到序列ΔS(n);
对序列ΔS(n)进行N点DFT求出最高谱线处的频率实现对ΔS(t)频率的估计,继而转化成距离的估计而实现目标的距离参数测量。
进一步的,S4,所述多个毫米波雷达分布式组网实现目标的定位,其中包括:
多个雷达相互独立测距,建立球面方程实现三维定位;
计算球面方程的最小二乘解作为目标所在位置。
本发明的基于毫米波雷达的动态目标的监测方法,能够用于动态目标的监测,通过毫米波雷达获取的原始数据经过预处理、DFT计算和分布式组网实现动态目标的监测方法可用于老人、婴幼儿、精神病患者、大面积烧伤等特殊人群进行体征动态监护。
附图说明
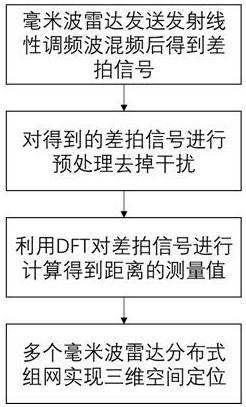
图1为实施例提供的基于毫米波雷达的动态目标的监测方法流程图。
图2为实施例中毫米波雷达三维组网示意图。
具体实施方式
为了更清楚地说明本申请实施例的技术方案,下面对实施例中所需要的附图作简单的介绍。
下面结合附图对本发明作进一步说明。
本发明实例提供的毫米波雷达动态目标定位的方法,是用于实时采集毫米波雷达数据,计算处理得到目标的三维定位,可为养老院、医院、家庭等的应用提供支持。以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
如图1是为申请实施例提供的基于毫米波雷达的动态目标的监测方法流程图。该方法包括S1利用毫米波雷达发射线性调频信号,经过回波信号与发射信号混频后得到基带差拍信号;S2对得到的信号进行预处理去除寄生调幅干扰、正交混频镜像干扰;S3利用DFT对含有目标距离信息的差拍信号进行频率的估计,继而转化成距离的估计实现目标的参数测量;S4多个毫米波雷达分布式组网实现目标的三维空间定位。
步骤S1中,假设单频信号的线性调制为f
发射后经过t1=2R/c时间得到的回波信号为:
混频后得到基带差拍信号为:
ΔS(t)=exp{j(T(t)-R(t))}
步骤S2中,对于寄生调幅干扰s(t),会对差拍信号ΔS(t)造成影响和干扰,即会在调频周期内差拍信号上叠加一个调制信号:
ΔS
此时利用寄生调幅干扰相对稳定的特点,先获取雷达空照是对应的差拍信号ΔS
对于正交混频镜像干扰,可以利用窗函数来抑制旁瓣对领近谱峰主瓣的影响,这里可以选用三阶哈布斯窗:
其中N为采样点数,k=3,a
步骤S4中,多个毫米波雷达相互独立测距,可以建立球面方程实现三维定位,只需要每个毫米波雷达测量距离,不需要角度的测量,不需要计算相位差,因此计算量适度、定位精度较高。
如图2所示,设三个固定雷达的位置互相垂直,坐标分别为(x
由于实际环境中存在误差,测量值和真实值存在一定的误差,因此设
即求解该方程组的最小二乘解,该解是当前测量条件下最接近真实值的解,就是目标的坐标,Newton法求解非线性方程组的具体过程如下:
设其解为
忽略余项R
这是一组线性方程,它的解
写成向量形式:
f(x
求其最小二乘解x
x
其中J
x
随着迭代误差逐渐减小小于门限值或达到设定得最大迭代次数时,此时可得到最小二乘解。
并且由于在很小时间内动态目标的运动位移很小,可以视为静态目标,因此此方法可以实现较高精度,较高实时性的动态目标监测。
- 一种基于毫米波雷达的动态目标的监测方法
- 一种基于毫米波雷达的室内人员安全一体化监测方法