一种涂装生产线机器人视觉集成系统
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及涂装技术领域,尤其涉及一种涂装生产线机器人视觉集成系统。
背景技术
涂装,是用涂料在基体材料表面形成有机覆层的材料保护技术。涂装是工程机械产品的表面制造工艺中的一个重要环节,防锈、防蚀涂装质量是产品全面质量的重要方面之一,产品外观质量不仅反映了产品防护、装饰性能,而且也是构成产品价值的重要因素。
随着科技的不断发展人工智能已逐步取代人工,走进人们的生活与工作中。而对于汽车制造业来说也是如此不同的车型、不同的结构不再需要通过人工识别来进行工作工业机器人的普及取代了人工繁杂沉重的工作,机器人的智能视觉系统则相当于机器人的眼睛来规范机器人的动作,因而对于机器人视觉系统的应用普及已广泛被汽车制造业所重视。
在涂装生产线中,涂装机器人的视觉系统起到了决定涂装质量的关键性作用,目前涂装生产线中的机器人视觉系统还存在具有较大的偏差性,导致实际喷涂质量无法稳定保持。因此,本发明提出一种涂装生产线机器人视觉集成系统,以解决现有技术中的不足之处。
发明内容
针对上述问题,本发明的目的在于提供一种涂装生产线机器人视觉集成系统,通过设置视觉追踪模拟模块、数据库和控制模块可以根据实际工件的视觉信息形成喷涂路线模拟地图,并将喷涂路线模拟地图与数据库中的已有喷涂路线基准示教地图进行匹配搜索,得一个最优的目标喷涂路线地图作为喷涂生产线中机器人视觉地图,可以有效降低机器人的视觉偏差对喷涂质量的影响,从而保证机器人可以获得高的喷涂质量。
为了实现本发明的目的,本发明通过以下技术方案实现:
一种涂装生产线机器人视觉集成系统,包括视觉图像采集模块、通信模块、补光模块、视觉图像处理模块、视觉图像定位模块、视觉图像测量模块、视觉追踪模拟模块、数据库、控制模块和喷涂路线地图输出模块;
所述视觉图像采集模块由多个图像采集相机组成,所述图像采集相机用于采集待涂装工件的外观图像,并将采集的外观图像通过通信模块传输至视觉图像处理模块;
所述补光模块由多个补光灯和控制器组成,所述补光灯用于对图像采集相机采集图像时进行光线补充操作,所述控制器用于控制补光灯的开关;
所述视觉图像处理模块用于接收视觉图像采集模块发送的外观图像,并对外观图像进行图像增强处理,并将进行图像增强处理后的外观图像通过网络模块传输至视觉图像计算模块;
所述视觉图像定位模块用于接收视觉图像处理模块发送的外观图像,并根据外观图像中包含的数据信息进行计算,计算出外观图像中目标图块的坐标位置以及形状;
所述视觉图像测量模块用于对形状确认后的外观图像中的目标图块进行尺寸测量;
所述视觉追踪模拟模块用于接收经过尺寸测量后的外观图像,然后对经过尺寸测量后的外观图像进行检测,检测出外观图像反馈的工件表征参数,然后根据工件表征参数进行喷涂路线模拟,得出喷涂路线模拟地图;
所述数据库用于储存工件的多个喷涂路线基准示教地图;
所述控制模块用于接收视觉追踪模拟模块得出的喷涂路线模拟地图,并将喷涂路线模拟地图与数据库内的多个喷涂路线基准示教地图进行匹配搜索,获得一个与喷涂路线模拟地图具有最高匹配度的喷涂路线基准示教地图作为目标喷涂路线地图进行输出;
所述喷涂路线地图输出模块用于接收控制模块输出的目标喷涂路线地图,并将接收的目标喷涂路线地图通过通信模块反馈至机器人控制系统内进行机器人控制。
进一步改进在于:所述视觉图像采集模块内还包括图像预处理单元,所述图像预处理单元用于对图像采集相机采集的外观图像进行图像缓存、图像导出、坐标系转换和自动标定处理。
进一步改进在于:所述视觉图像采集模块内还包括光源标定单元,所述光源标定单元用于在图像采集相机采集外观图像时标定合适位置的补光灯,并将标定指令发送至补光模块,利用控制器控制对应的补光灯进行开关操作。
进一步改进在于:所述视觉图像处理模块对外观图像进行图像增强处理时,具体包括对外观图形进行滤波、二值化、缩放、通道提取、形态学处理、灰度化、旋转、镜像、图形拼接、裁剪、直方图均衡化和光度立体化处理。
进一步改进在于:所述视觉图像定位模块计算出外观图像中目标图块的坐标位置以及形状时,包括对外观图像进行找点、找边、找圆、灰度匹配、特征匹配、轮廓匹配、ROI校正基准设置、生成ROI、霍夫找圆、霍夫找边、角点检测和贴合处理。
进一步改进在于:所述视觉图像测量模块进行尺寸测量时,具体包括进行卡尺测量、间隙测量、几何关系判定、颜色测量、亮度测量、自动对焦、激光三角测量和对焦3D测量。
进一步改进在于:所述视觉追踪模拟模块对外观图像进行检测时,具体包括对外观图像进行Blob分析、划痕检测轮廓提取、轮廓处理、轮廓对比、数据转换和崩边检测。
进一步改进在于:所述数据库内嵌设有排序单元,所述排序单元用于对数据库储存的工件的多个喷涂路线基准示教地图进行成熟度排序。
进一步改进在于:所述控制模块将喷涂路线模拟地图与数据库内的多个喷涂路线基准示教地图进行匹配搜索时,优先与成熟度排序排名高的喷涂路线基准示教地图进行匹配。
本发明的有益效果为:本发明系统通过由视觉图像采集模块、通信模块、补光模块、视觉图像处理模块、视觉图像定位模块、视觉图像测量模块、视觉追踪模拟模块、数据库、控制模块和喷涂路线地图输出模块组成,其中视觉图像采集模块、补光模块和视觉图像处理模块可以保证系统采集的图像具有高质量性,通过设置视觉追踪模拟模块、数据库和控制模块可以根据实际工件的视觉信息形成喷涂路线模拟地图,并将喷涂路线模拟地图与数据库中的已有喷涂路线基准示教地图进行匹配搜索,得一个最优的目标喷涂路线地图作为喷涂生产线中机器人视觉地图,可以有效降低机器人的视觉偏差对喷涂质量的影响,从而保证机器人可以获得高的喷涂质量。
附图说明
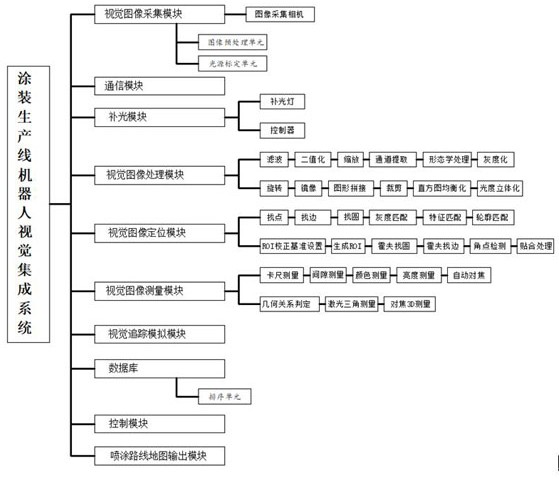
图1为本发明系统框架结构示意图。
具体实施方式
为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
根据图1所示,本实施例提出一种涂装生产线机器人视觉集成系统,包括视觉图像采集模块、通信模块、补光模块、视觉图像处理模块、视觉图像定位模块、视觉图像测量模块、视觉追踪模拟模块、数据库、控制模块和喷涂路线地图输出模块;
所述视觉图像采集模块由多个图像采集相机组成,所述图像采集相机用于采集待涂装工件的外观图像,并将采集的外观图像通过通信模块传输至视觉图像处理模块;
所述补光模块由多个补光灯和控制器组成,所述补光灯用于对图像采集相机采集图像时进行光线补充操作,所述控制器用于控制补光灯的开关;
所述视觉图像处理模块用于接收视觉图像采集模块发送的外观图像,并对外观图像进行图像增强处理,并将行图像增强处理后外观图像通过网络模块传输至视觉图像计算模块;
所述视觉图像定位模块用于接收视觉图像处理模块发送的外观图像,并根据外观图像中包含的数据信息进行计算,计算出外观图像中目标图块的坐标位置以及形状;
所述视觉图像测量模块用于对形状确认后的外观图像中的目标图块进行尺寸测量;
所述视觉追踪模拟模块用于接收经过尺寸测量后的外观图像,然后对经过尺寸测量后的外观图像进行检测,检测出外观图像反馈的工件表征参数,然后根据工件表征参数进行喷涂路线模拟,得出喷涂路线模拟地图;
所述数据库用于储存工件的多个喷涂路线基准示教地图;
所述控制模块用于接收视觉追踪模拟模块得出的喷涂路线模拟地图,并将喷涂路线模拟地图与数据库内的多个喷涂路线基准示教地图进行匹配搜索,获得一个与喷涂路线模拟地图具有最高匹配度的喷涂路线基准示教地图作为目标喷涂路线地图进行输出;
所述喷涂路线地图输出模块用于接收控制模块输出的目标喷涂路线地图,并将接收的目标喷涂路线地图通过通信模块反馈至机器人控制系统内进行机器人控制。
所述视觉图像采集模块内还包括图像预处理单元,所述图像预处理单元用于对图像采集相机采集的外观图像进行图像缓存、图像导出、坐标系转换和自动标定处理。
所述视觉图像采集模块内还包括光源标定单元,所述光源标定单元用于在图像采集相机采集外观图像时标定合适位置的补光灯,并将标定指令发送至补光模块,利用控制器控制对应的补光灯进行开关操作。
所述视觉图像处理模块对外观图像进行图像增强处理时,具体包括对外观图形进行滤波、二值化、缩放、通道提取、形态学处理、灰度化、旋转、镜像、图形拼接、裁剪、直方图均衡化和光度立体化处理。
所述视觉图像定位模块计算出外观图像中目标图块的坐标位置以及形状时,包括对外观图像进行找点、找边、找圆、灰度匹配、特征匹配、轮廓匹配、ROI校正基准设置、生成ROI、霍夫找圆、霍夫找边、角点检测和贴合处理。
所述视觉图像测量模块进行尺寸测量时,具体包括进行卡尺测量、间隙测量、几何关系判定、颜色测量、亮度测量、自动对焦、激光三角测量和对焦3D测量。
所述视觉追踪模拟模块对外观图像进行检测时,具体包括对外观图像进行Blob分析、划痕检测轮廓提取、轮廓处理、轮廓对比、数据转换和崩边检测。
所述数据库内嵌设有排序单元,所述排序单元用于对数据库储存的工件的多个喷涂路线基准示教地图进行成熟度排序。
所述控制模块将喷涂路线模拟地图与数据库内的多个喷涂路线基准示教地图进行匹配搜索时,优先与成熟度排序排名高的喷涂路线基准示教地图进行匹配。
本发明系统通过由视觉图像采集模块、通信模块、补光模块、视觉图像处理模块、视觉图像定位模块、视觉图像测量模块、视觉追踪模拟模块、数据库、控制模块和喷涂路线地图输出模块组成,其中视觉图像采集模块、补光模块和视觉图像处理模块可以保证系统采集的图像具有高质量性,通过设置视觉追踪模拟模块、数据库和控制模块可以根据实际工件的视觉信息形成喷涂路线模拟地图,并将喷涂路线模拟地图与数据库中的已有喷涂路线基准示教地图进行匹配搜索,得一个最优的目标喷涂路线地图作为喷涂生产线中机器人视觉地图,可以有效降低机器人的视觉偏差对喷涂质量的影响,从而保证机器人可以获得高的喷涂质量。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种涂装生产线机器人视觉集成系统
- 一种涂装生产线视觉集成系统装置的安装支架