一种堇青石三元催化剂载体视觉孔线垂直度定位装置
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及三元催化器技术领域,具体为一种堇青石三元催化剂载体视觉孔线垂直度定位装置。
背景技术
三元催化器,是安装在汽车排气系统中最重要的机外净化装置,它可将汽车尾气排出的CO一氧化碳、HC碳氢化合物和NOx氮氧化物等有害气体通过氧化和还原作用转变为无害的二氧化碳、水和氮气,由于这种催化器可同时将废气中的三种主要有害物质转化为无害物质,故称三元,当高温的汽车尾气通过净化装置时,三元催化器中的净化剂将增强CO、HC和NOx三种气体的活性,促使其进行一定的氧化-还原化学反应,其中CO在高温下氧化成为无色、无毒的二氧化碳气体,HC化合物在高温下氧化成水(H20)和二氧化碳,NOx还原成氮气和氧气,三种有害气体变成无害气体,使汽车尾气得以净化,三元催化器性能稳定、质量可靠、寿命长,三元催化器的载体部件是一块多孔陶瓷材料,安装在特制的排气管当中,称它是载体,是因为它本身并不参加催化反应,而是在上面覆盖着一层铂、铑、钯等贵重金属,它可以把废气中的HC、CO变成水和CO2,同时把Nox分解成氮气和氧气,HC、CO是有毒气体,过多吸入会导致人死亡,而NOX会直接导致光化学烟雾的发生,经过研究证明,三元催化器是减少这些排放物的最有效的方法,通过氧化和还原反应,一氧化碳被氧化成二氧化碳,碳氢化合物被氧化成水和二氧化碳,氮氧化合物被还原成氮气和氧气,三种有害气体都变成了无害气体,三元催化剂最低要在350摄氏度的时候起反应,温度过低时,转换效率急剧下降,而催化剂的活性温度是400℃到800℃左右,过高也会使催化剂老化加剧,在理想的空燃比14.7:1下,催化转化的效果也最好。
三元催化剂载体的特殊性,载体内部的孔洞与切割断面的垂直度很难通过检具进行测量,现有载体切割设备切割载体端面时载体定位是以载体外部形状做定位,定位误差大,对生产成品三元催化剂滤芯产品质量造成较大影响,因载体外形不标准,载体外形与内部孔洞平行度相差大,人工根据载体外观形状尺寸定位并不能起到定位作用,切割误差大、产品一致性差、并且不能实现产品尺寸数据化,切割出来的载体大部分不能满足端面垂直度要求,再加上人工切割效率低同时对工人熟练程度要求高,劳动强度较大,切割过程中粉尘大对人体呼吸系统有一定损害,需要多个班组进行生产。
发明内容
本发明的目的在于提供一种堇青石三元催化剂载体视觉孔线垂直度定位装置,具备载体自动定位、切割自动定位的优点,解决了现有载体切割设备切割载体端面时载体定位是以载体外部形状做定位,定位误差大,对生产成品三元催化剂滤芯产品质量造成较大影响,因载体外形不标准,载体外形与内部孔洞平行度相差大,人工根据载体外观形状尺寸定位并不能起到定位作用,切割误差大、产品一致性差、并且不能实现产品尺寸数据化,切割出来的载体大部分不能满足端面垂直度要求的问题。
为实现上述目的,本发明提供如下技术方案:一种堇青石三元催化剂载体视觉孔线垂直度定位装置,包括工业六轴机器人和全自动双圆盘锯床,所述工业六轴机器人的前端固定连接有机器人前端夹具,所述机器人前端夹具的内壁设置有三元催化剂载体,所述三元催化剂载体的右侧设置有高能激光器,高能激光器发射激光光速,所述全自动双圆盘锯床正面的下端设置有智能工业相机,所述全自动双圆盘锯床表面的上端设置有圆盘锯床锯片。
优选的,所述高能激光器和智能工业相机固定安装在同轴线上,所述高能激光器和智能工业相机的镜头均采用特殊镀层玻璃。
优选的,所述智能工业相机的控制器与电气控制系统连接,并且采用高速通讯方式。
优选的,所述全自动双圆盘锯床的双圆盘通过伺服控制可调整圆盘锯床锯片的间距,且两个圆盘锯床锯片相互平行,两个轴同轴安装,所述全自动双圆盘锯床内部集成有除尘吹灰装置。
优选的,所述工业六轴机器人的控制器与系统PLC通过profinet协议进行高速通讯。
优选的,所述全自动双圆盘锯床表面的右侧固定连接有摇臂,且摇臂的底部固定连接有显示屏。
优选的,所述工业六轴机器人与全自动双圆盘锯床水平分布,所述工业六轴机器人位于全自动双圆盘锯床的右侧。
与现有技术相比,本发明的有益效果如下:
1、本发明通过工业六轴机器人运动算法配合激光光束计算出载体孔线相对平行度,即准确又高效,提供用于三元催化剂载体内部孔线平行度定位的方法,为实现三元催化剂载体内部孔线平行度定位,此方法采用非接触式光学方法配合工业六轴机器人的运动算法,可达到不破坏载体孔线且准确高效的定位载体内部孔线,定位完成后直接送入全自动双圆盘锯床内切割,切割后载体的端面与内部孔线垂直,提高生产效率以及产品质量同时避免操作员的粉尘伤害,工业六轴机器人定位配合全自动双圆盘锯床自动切割载体,可实现载体自动定位、切割自动定位的效果,解决了现有载体切割设备切割载体端面时载体定位是以载体外部形状做定位,定位误差大,对生产成品三元催化剂滤芯产品质量造成较大影响,因载体外形不标准,载体外形与内部孔洞平行度相差大,人工根据载体外观形状尺寸定位并不能起到定位作用,切割误差大、产品一致性差、并且不能实现产品尺寸数据化,切割出来的载体大部分不能满足端面垂直度要求的问题。
2、本发明通过高能激光器和智能工业相机的镜头均采用特殊镀层玻璃,可有效滤除散射光以确保激光光束的直线度以及智能工业相机的识别精度,通过全自动双圆盘锯床内部集成有除尘吹灰装置,切割同时对载体内部孔线吹灰并抽风除尘,满足不同长度三元催化剂载体的切割,内部空间满足工业六轴机器人前端机器人前端夹具进出无干涉,通过PLC可记录工业六轴机器人每个动作发出的轴角度值以及工业六轴机器人通过特殊算法给出的实际工件坐标值。
附图说明
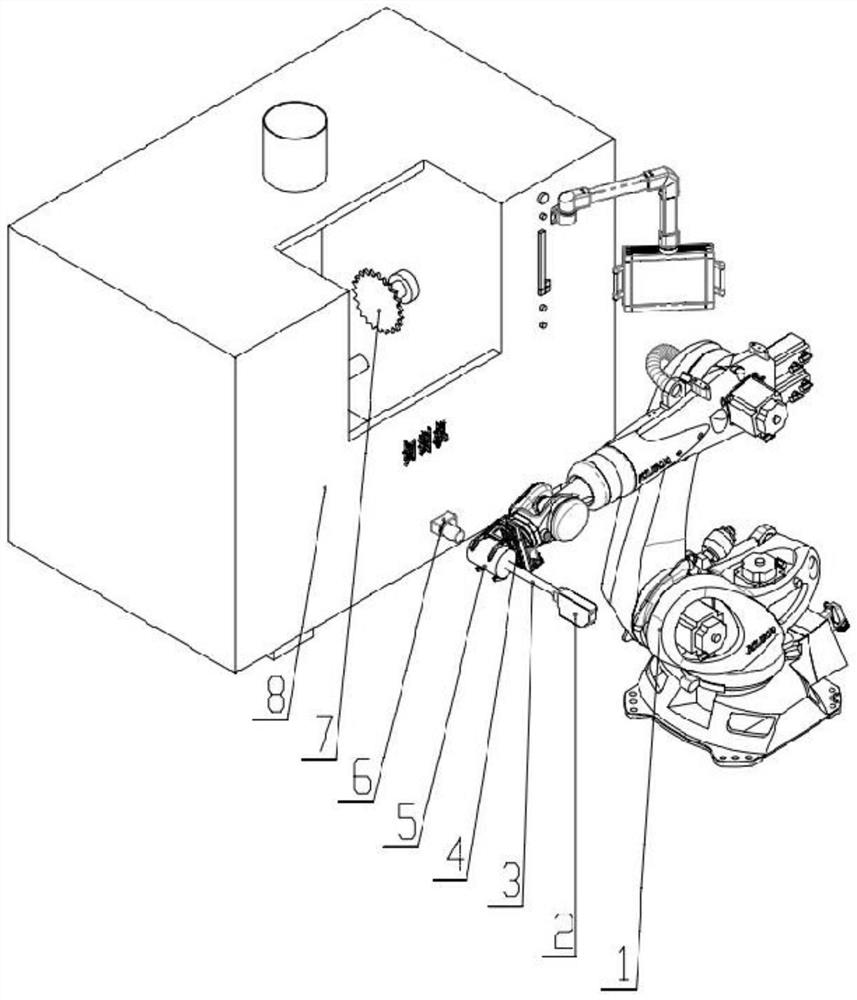
图1为本发明结构示意图。
图中:1、工业六轴机器人;2、高能激光器;3、激光光束;4、机器人前端夹具;5、三元催化剂载体;6、智能工业相机;7、圆盘锯床锯片;8、全自动双圆盘锯床。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的工业六轴机器人1、高能激光器2、激光光束3、机器人前端夹具4、三元催化剂载体5、智能工业相机6、圆盘锯床锯片7和全自动双圆盘锯床8部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
请参阅图1,一种堇青石三元催化剂载体视觉孔线垂直度定位装置,包括工业六轴机器人1和全自动双圆盘锯床8,工业六轴机器人1的前端固定连接有机器人前端夹具4,机器人前端夹具4的内壁设置有三元催化剂载体5,三元催化剂载体5的右侧设置有激光光束3,激光光束3的右侧设置有高能激光器2,全自动双圆盘锯床8正面的下端设置有智能工业相机6,全自动双圆盘锯床8表面的上端设置有圆盘锯床锯片7,通过工业六轴机器人1运动算法配合激光光束3计算出载体孔线相对平行度,即准确又高效,提供用于三元催化剂载体5内部孔线平行度定位的方法,为实现三元催化剂载体5内部孔线平行度定位,此方法采用非接触式光学方法配合工业六轴机器人1的运动算法,可达到不破坏载体孔线且准确高效的定位载体内部孔线,定位完成后直接送入全自动双圆盘锯床8内切割,切割后载体的端面与内部孔线垂直,提高生产效率以及产品质量同时避免操作员的粉尘伤害,工业六轴机器人1定位配合全自动双圆盘锯床8自动切割载体,可实现载体自动定位、切割自动定位的效果,解决了现有载体切割设备切割载体端面时载体定位是以载体外部形状做定位,定位误差大,对生产成品三元催化剂滤芯产品质量造成较大影响,因载体外形不标准,载体外形与内部孔洞平行度相差大,人工根据载体外观形状尺寸定位并不能起到定位作用,切割误差大、产品一致性差、并且不能实现产品尺寸数据化,切割出来的载体大部分不能满足端面垂直度要求的问题。
本实施例中,具体的,高能激光器2和智能工业相机6固定安装在同轴线上,高能激光器2和智能工业相机6的镜头均采用特殊镀层玻璃,通过高能激光器2和智能工业相机6的镜头均采用特殊镀层玻璃,可有效滤除散射光以确保激光光束3的直线度以及智能工业相机6的识别精度。
本实施例中,具体的,智能工业相机6的控制器与电气控制系统连接,并且采用高速通讯方式。
本实施例中,具体的,全自动双圆盘锯床8的双圆盘通过伺服控制可调整圆盘锯床锯片7的间距,且两个圆盘锯床锯片7相互平行,两个轴同轴安装,全自动双圆盘锯床8内部集成有除尘吹灰装置,通过全自动双圆盘锯床8内部集成有除尘吹灰装置,切割同时对载体内部孔线吹灰并抽风除尘,满足不同长度三元催化剂载体5的切割,内部空间满足工业六轴机器人1前端机器人前端夹具4进出无干涉。
本实施例中,具体的,工业六轴机器人1的控制器与系统PLC通过profinet协议进行高速通讯,通过PLC可记录工业六轴机器人1每个动作发出的轴角度值以及工业六轴机器人1通过特殊算法给出的实际工件坐标值。
本实施例中,具体的,全自动双圆盘锯床8表面的右侧固定连接有摇臂,且摇臂的底部固定连接有显示屏。
本实施例中,具体的,工业六轴机器人1与全自动双圆盘锯床8水平分布,工业六轴机器人1位于全自动双圆盘锯床8的右侧。
使用时,孔线定位时,工业六轴机器人1通过机器人前端夹具4夹取三元催化剂载体5,工业六轴机器人1将三元催化剂载体5移动到高能激光器2与智能工业相机6之间,此时三元催化剂载体5遮挡激光光束3,若三元催化剂载体5内部孔线与激光光束3平行时,光线则会通过三元催化剂载体5内部孔洞穿过载体内部直射到智能工业相机6,若三元催化剂载体5内部孔线与激光光束3不平行时,则激光光束3不会直接穿透三元催化剂载体5,光线会散射,此时智能工业相机6捕捉到的光线较少,系统给工业六轴机器人1发送转动三元催化剂载体5的指令,工业六轴机器人1将三元催化剂载体5沿载体中心转动并实时发送转动过程中三元催化剂载体5位置坐标值,此时智能工业相机6捕捉到激光光束3不断变化,智能工业相机6同时记录管线的强弱,转动结束后,系统通过智能工业相机6给出的光线强弱值取最强光线值,并让工业六轴机器人1转动到最强光线值位置,再次确认光线强度,光线最强的位置即为孔线与激光光束3最为平行的状态,则三元催化剂载体5的内部孔线与工业六轴机器人1相对坐标通过计算即可得出,此时PLC给出工业六轴机器人1移动到全自动双圆盘锯床8的切割路径,工业六轴机器人1通过PLC预设路径将三元催化剂载体5送至全自动双圆盘锯床8内直接对三元催化剂载体5两端面进行切割,切割后的三元催化剂载体5,端面则与三元催化剂载体5内部孔线垂直,垂直度与三元催化剂载体5内部孔线的直线度有一定关系,解决了现有载体切割设备切割载体端面时载体定位是以载体外部形状做定位,定位误差大,对生产成品三元催化剂滤芯产品质量造成较大影响,因载体外形不标准,载体外形与内部孔洞平行度相差大,人工根据载体外观形状尺寸定位并不能起到定位作用,切割误差大、产品一致性差、并且不能实现产品尺寸数据化,切割出来的载体大部分不能满足端面垂直度要求的问题。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本申请文件中使用到的标准零件均可以从市场上购买,而且根据说明书和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中常规的型号,控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本申请文主要用来保护机械装置,所以本申请文不再详细解释控制方式和电路连接。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种堇青石三元催化剂载体视觉孔线垂直度定位装置
- 一种以堇青石质蜂窝陶瓷为载体的三元催化剂