激光焊锡设备
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及电子产品的焊锡加工技术领域,特别是指一种激光焊锡设备。
背景技术
电子产品的安装过程中,需要采用焊锡工艺焊接,也有电子产品需要采用焊锡和吸锡工艺去除产品的表面镀金层,例如,焊接型连接器,其端子的焊杯内表面有镀金层,在与导线焊接前需要去除该表面镀金层,主要步骤分为焊锡和吸锡,通过焊锡工艺将焊锡熔解在端子的空焊杯之内,使焊杯表面的镀金层熔解在焊锡中,再通过吸锡工艺将空焊杯之内的焊锡再次熔化并使用吸锡工具将焊锡吸出清理掉,以去除焊杯内表面镀金层,再进行之后的导线焊接。去除焊杯内表面镀金层主要目的是为了将防止焊锡与焊杯上的镀金层融合形成“金脆”,会使焊点硬度下降,严重的会发生断裂。目前焊接型连接器的端子焊杯内表面镀金层去除,主要采用手工持烙铁焊接及吸焊去除,端子的焊杯小且深,手工操作不易且费时费力,对员工操作技术水平要求很高,而且良品率低,生产效率低,为此,本发明对该类产品的焊锡步骤的技术改造及其自动化设备进行研究优化改进。
发明内容
本发明的目的在于克服现有技术的不足,提供一种可替代工手动焊锡,实现自动化作业,提高产品加工品质及生产效率的激光焊锡设备。
为了达成上述目的,本发明的解决方案是:
一种激光焊锡设备,包括:
机架,机架上设置有工作台;
XY轴移动模组,其设置在机架的工作台上;
激光焊锡机构,其设置在XY轴移动模组上,包括模组固定板、Z轴直线模组、激光焊锡组件及相机模组;模组固定板设置在XY轴移动模组上,Z轴直线模组设置在模组固定板上,XY轴移动模组驱动Z轴直线模组在XY轴方向往复移动,所述激光焊锡组件设置在Z轴直线模组上,相机模组设置在激光焊锡组件一侧的Z轴直线模组上,Z轴直线模组驱动激光焊锡组件和相机模组在Z轴方向往复移动;
定位旋转机构,其设置在机架的工作台上,且位于激光焊锡机构的下方,所述定位旋转机构包括旋转装置及设置在旋转装置的旋转端上的产品定位治具,旋转装置带动产品定位治具转动。进一步,XY轴移动模组包括模组支撑座、导轨支撑座、Y轴直线模组、Y轴直线导轨及X轴直线模组;模组支撑座及导轨支撑座固定设置在工作台的两相对侧,Y轴直线模组设置在模组支撑座上,Y轴直线导轨设置在导轨支撑座上且与Y轴直线模组平行;X轴直线模组横架在Y轴直线模组和Y轴直线导轨上,Y轴直线模组驱动X轴直线模组沿Y轴直线导轨方向往复运动。
进一步,在模组支撑座上位于Y轴直线模组的一侧或两侧还设置有Y轴直线导轨,Y轴直线导轨与Y轴直线模组平行,X轴直线模组的一端滑动设置在Y轴直线模组和其周边的Y轴直线导轨上,用以提升Y轴直线模组运行的稳定性。
进一步,XY轴移动模组还包括模组横梁及X轴直线导轨,模组横梁横架在Y轴直线模组和Y轴直线导轨上,X轴直线模组设置在模组横梁的前侧上,Y轴直线模组驱动模组横梁和X轴直线模组沿Y轴直线导轨方向往复运动;在模组横梁上位于X轴直线模组的一侧或两侧还设置有X轴直线导轨,X轴直线导轨与X轴直线模组平行,使设置在X轴直线模组上的安装装置可一并滑动连接在X轴直线导轨上,用以提升X轴直线模组运行的稳定性。
进一步,激光焊锡组件包括组件固定板、激光头固定板、激光头、送丝机构、锡丝架、锡丝导管、出锡调整架、出锡嘴及锡丝;送丝机构包括送丝器及驱动送丝器运行的送丝电机,组件固定板固定在Z轴直线模组的滑台上,激光头通过激光头固定板设置在组件固定板上,激光头的输出端朝下,组件固定板的下端一侧设置有出锡调整架,出锡嘴设置在出锡调整架上且其底端朝向激光头下方,出锡嘴的头部连接出锡导管的底端,出锡导管的顶端连接送丝器,锡丝架设置在送丝器的输入端,其上套置有锡丝卷,锡丝卷上的锡丝绕经送丝器后从锡丝导管连接至出锡嘴,送丝机构自动送锡丝至激光头下方。
进一步,所述送丝电机为步进电机或伺服电机。
进一步,所述相机模组包括相机固定板、相机、镜头及光源;相机固定板固定在Z轴直线模组的滑台上,相机固定在相机固定板上,相机的下方连接镜头,光源设置在相机的下方,为相机提供光源。
进一步,所述定位旋转机构的旋转装置为旋转电机或旋转气缸。
进一步,所述定位旋转机构的旋转装置包括底板、U型固定架、固定板、R轴电机、联轴器、转动件、U轴电机固定架、U轴电机、U轴旋转轴及旋转台;底板固定在机架的工作台上,U型固定架及固定板分别设置在底板上,U轴电机固定架设置在U型固定架和固定板之间,U轴电机固定架的两端分别通过转动件可旋转的设置在U型固定架及固定板的上部,R轴电机固定在U轴电机固定架的外侧,位于U型固定架上的转动件通过联轴器连接至R轴电机的输出端;U轴电机固定在U轴电机固定架上,U轴电机的输出轴朝上连接U轴旋转轴的底端,U轴旋转轴的顶端连接旋转台,产品定位治具固定在旋转台上,U轴电机驱动产品定位治具转动。
进一步,所述产品定位治具上设置有用于定位放置产品的放置槽。
进一步,所述产品定位治具包括产品定位块及压紧装置,产品定位块设置在旋转台上,产品定位块设置有通用型产品放置槽,压紧装置设置在产品放置槽的一侧,压紧装置的一端可伸缩地朝向产品放置槽。
进一步,所述压紧装置包括固定块、活动栓、弹簧及压紧块;固定块固定在产品定位块的一侧,固定块上设有供活动栓穿过的通孔,活动栓的一端穿过固定块后与压紧块固定在一起,活动栓于固定块与压紧块之间设置有所述弹簧。
进一步,所述压紧装置包括气缸及压紧块,气缸设置在产品定位块的一侧,气缸的推板朝向产品定位块,压紧块连接气缸推板。
进一步,所述压紧装置包括第一压紧装置及第二压紧装置,第一压紧装置包括第一气缸及第一压紧块,第一气缸的推板朝向产品定位块、且连接第一压紧块,第二压紧装置包括第二气缸及第二压紧块,第二压紧装置相对第一压紧装置水平垂直设置,该第二压紧气缸的推板朝向产品定位块、且连接第二压紧块。
进一步,所述定位旋转机构还包括R轴感应模组及U轴感应模组,R轴感应模组包括R轴感应器及R轴感应片,R轴感应器设置在U型固定架对应R轴原点位置上,R轴感应片设置在联轴器上,R轴感应片旋转感应划过R轴感应器;U轴感应模组包括U轴感应器及U轴感应片,U轴感应器设置在U轴电机固定架对应U轴原点位置上,U轴感应片设置在U轴旋转轴上,U轴感应片旋转感应划过U轴感应器。
采用上述方案后,本发明激光焊锡设备具有以下有益效果:
1、本发明采用激光焊锡工艺,激光光斑可达微米级别且大小可调节,易于加工控制,精度远高于传统烙铁工艺,可适应多种类型产品的焊点,工件加工适应性更强,激光虚焊风险小;激光非接触焊接,不会对产品造成机械损伤;细小的激光束替代烙铁头,在加工件表面有其他干涉物时同样易于加工;激光只对光斑所照射到的部分进行加热,局部温度上升较快,局部加热,热影响区小;在焊锡前,采用激光对加工部位进行预热,提升焊锡效果,在焊锡后,锡丝回抽后,激光加热延迟,可改善焊锡拉丝不良。
2、本发明XY轴移动模组进一步可采用X轴直线模组、Y轴直线模组,激光焊锡机构的Z轴直线模组,可采用丝杆型直线模组或同步带型直线模组,可进一步采用精密的直线模组,移动精度可达到±0.01mm,可保证焊锡位置的精度。
3、本发明送锡机构的送丝电机可采用步进电机或伺服电机以驱动送丝器自动送锡丝,精准控制送锡机构的吐锡量,并通过焊锡时间的控制,确保每次进入端子焊杯的焊锡量一致,无过多的焊熔液溢出端子焊杯外表面而造成端子焊杯外表面污染及镀金层去除不良。
4、本发明采用相机模组定位焊锡位置,并通过工控电脑精准控制其他所需机构到达指定位置,产品的每个端子可进一步采用边定位边上锡作业方式,以保证产品的各端子焊杯上锡位置的准确性。
5、由于有些产品的端子焊杯是两侧朝向,本发明的定位旋转机构设计有旋转轴来达到自动旋转产品的功能,使产品的端子焊杯调整到适合位置后上锡,进一步,定位旋转机构还可分别设计有R轴旋转和U轴旋转结构,使产品可以在R轴和U轴上旋转,使连接器的每排端子焊杯调整较佳上锡位置后加工,提高上锡效果。
6、本发明定位旋转机构的产品定位治具,可依实际产品形状设计专用治具,不同产品加工更换治具即可,也可进一步采用产品定位块及压紧装置,在产品定位块上设置通用型产品放置槽,并采用压紧装置将产品压紧定位在产品定位块上,以适合多各类产品加工制作,无需更换治具,减少换料时间。
7、本发明激光焊锡设备焊锡位置精准、产品端子焊杯外表面无焊料残留及无损伤外表面镀金层,也不会损伤产品其他位置,可确保产品加工品质,采用自动化设备代替手工操作,可提高产品良率及生产效率;本发明激光焊锡设备还可进一步与机器人或机械手搭配实现全自动化作业;本发明激光焊锡设备焊锡不仅可用于连接器产品的焊接,还可用于其他电子产品的焊接,例如PCB等电路板,针对具体产品,可进一步在定位旋转机构的结构上做适应性优化改进。
附图说明
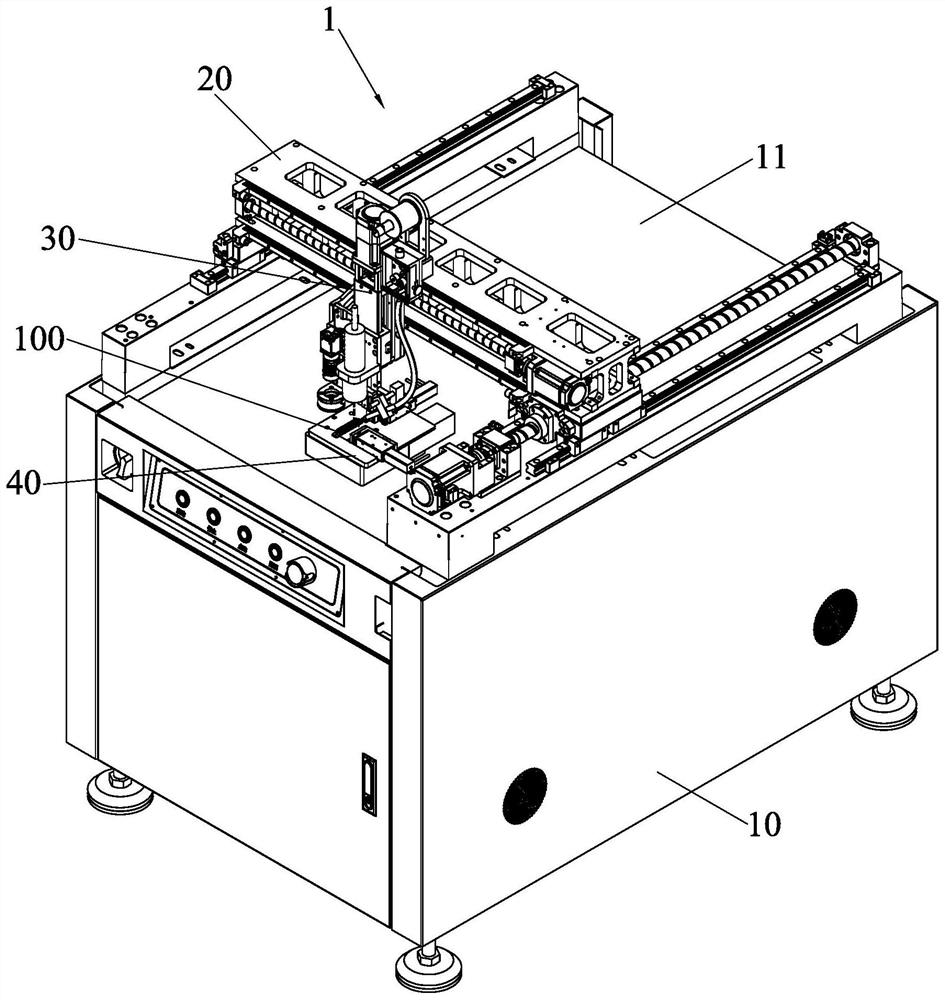
图1为本发明激光焊锡设备的立体图。
图2为本发明激光焊锡设备的前侧图。
图3为本发明激光焊锡设备的俯视图。
图4为本发明激光焊锡设备的左侧图。
图5为本发明XY轴移动模组的立体图。
图6为本发明XY轴移动模组的俯视图。
图7为本发明激光焊锡机构的立体图。
图8为本发明激光焊锡机构的前侧图。
图9为本发明激光焊锡机构的右侧图。
图10为本发明激光焊锡机构和定位旋转机构配合工作示例的立体图。
图11为图10的A处放大图。
图12为本发明激光焊锡组件的立体图。
图13为本发明激光焊锡组件的前侧图。
图14为本发明定位旋转机构实施例一的立体图。
图15为本发明定位旋转机构实施例一的前侧图。
图16为本发明定位旋转机构实施例一的俯视图。
图17为本发明定位旋转机构实施例一的左侧图。
图18为本发明定位旋转机构实施例一产品倾斜状态的立体图。
图19为本发明定位旋转机构实施例一产品倾斜状态的前侧图。
图20为本发明定位旋转机构实施例二的立体图。
图21为本发明定位旋转机构实施例二的前侧图。
图22为本发明定位旋转机构实施例二的俯视图。
图23为本发明定位旋转机构实施例二的左侧图。
图24为本发明定位旋转机构实施例二产品倾斜状态的立体图。
图25为本发明定位旋转机构实施例二产品倾斜状态的前侧图。
图26为本发明定位旋转机构实施例三的立体图。
图27为本发明定位旋转机构实施例三的俯视图。
图28为本发明定位旋转机构实施例三的左侧图。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不应理解为必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行结合和组合。
如1图至图4所示,本发明是一种激光焊锡设备1,包括机架10、XY轴移动模组20、激光焊锡机构30及定位旋转机构40。
机架10的顶面形成工作台11,工作台11较佳可采用大理石台面,用以提升机架10的稳定性,确保各机构在工作台11上稳定运行,机架10上还设置有连接XY轴移动模组20、激光焊锡机构30及定位旋转机构40的控制按钮。
如5图至图6所示,XY轴移动模组20包括模组支撑座21、导轨支撑座22、Y轴直线模组23、Y轴直线导轨24及X轴直线模组26;模组支撑座21及导轨支撑座22固定设置在工作台11的两相对侧,Y轴直线模组23设置在模组支撑座21上,Y轴直线导轨24设置在导轨支撑座22上且与Y轴直线模组23平行;X轴直线模组26横架在Y轴直线模组23和Y轴直线导轨24上,Y轴直线模组23驱动X轴直线模组26沿Y轴直线导轨24方向往复运动;
较佳的,在模组支撑座21上位于Y轴直线模组23的一侧或两侧还设置有Y轴直线导轨,Y轴直线导轨与Y轴直线模组23平行,X轴直线模组26的一端设置在Y轴直线模组23和其周边的Y轴直线导轨上,用以提升Y轴直线模组23运行的稳定性;
较佳的,XY轴移动模组20还包括模组横梁25及X轴直线导轨27,模组横梁25横架在Y轴直线模组23和Y轴直线导轨24上,X轴直线模组26设置在模组横梁25的前侧上,Y轴直线模组23驱动模组横梁25和X轴直线模组26沿Y轴直线导轨24方向往复运动;在模组横梁25上位于X轴直线模组26的一侧或两侧还设置有X轴直线导轨27,X轴直线导轨27与X轴直线模组26平行,使设置在X轴直线模组26上的安装装置一并连接在X轴直线导轨27上,用以提升X轴直线模组26运行的稳定性。
如图7至图9所示,激光焊锡机构30包括模组固定板31、Z轴直线模组32、激光焊锡组件33及相机模组34;模组固定板31设置在XY轴移动模组20的X轴直线模组26上,Z轴直线模组32固定在模组固定板31上,XY轴移动模组驱动Z轴直线模组在XY轴方向往复移动,所述激光焊锡组件33设置在Z轴直线模组32上,相机模组34设置在激光焊锡组件33一侧的Z轴直线模组32上,Z轴直线模组32驱动激光焊锡组件33和相机模组34在Z轴方向往复运动。
如图12至图13所示,激光焊锡组件33包括组件固定板331、激光头固定板332、激光头333、送丝机构334、锡丝架335、锡丝导管336、出锡调整架337、出锡嘴338及锡丝339;其中送丝机构334包括送丝器3341及驱动送丝器运行的送丝电机3342,组件固定板331固定在Z轴直线模组32上,激光固定板332固定在组件固定板331上,激光头333设置在激光固定板332上且其输出端朝下,组件固定板331的下端一侧设置有出锡调整架337,出锡嘴338设置在出锡调整架337上且其底端朝向激光头下方,通过出锡调整架337可调整出锡嘴338的出锡位置,出锡嘴338的头部连接出锡导管336的底端,出锡导管336的顶端连接送丝器3341,送丝电机3342可采用步进电机或伺服电机以驱动送丝器3341自动传送、回收锡丝,锡丝架335设置在送丝器3341的输入端,其上套置有锡丝卷,锡丝卷上的锡丝339从锡丝架335上绕经送丝器3341后从锡丝导管336连接至出锡嘴338,送丝机构334自动送锡丝339至激光头333的底端加工区域。
如图7至图9所示,相机模组34包括相机固定板341、相机342、镜头343及光源344;相机固定板341固定在Z轴直线模组32上,Z轴直线模组32驱动相机固定板341在Z轴方向往复运动,相机342固定在相机固定板341上,相机342的下方连接镜头343,光源344设置在相机342的下方,为相机342提供光源。
如图14至图28所示,为定位旋转机构40的结构示意图,定位旋转机构40设置在机架10的工作台11上,且位于激光焊锡机构30的下方,其中,图14至图19为定位旋转机构40的第一种实施例,图20至图25为定位旋转机构40的第二种实施例,图26至图28为定位旋转机构40的第三种实施例。
如图14至图19所示,为定位旋转机构的实施例一,定位旋转机构40包括底板41、U型固定架42、固定板43、R轴电机44、联轴器45、转动件46、U轴电机固定架47、U轴电机48、U轴旋转轴49、旋转台410及产品定位治具;底板41固定在机架10的工作台11上,U型固定架42及固定板43分别设置在底板41上,U轴电机固定架47设置在U型固定架42和固定板43之间,且U轴电机固定架47的两端分别通过转动件46可旋转的设置在U型固定架42及固定板43的上部,R轴电机44固定在U轴电机固定架47的外侧,联轴器45的一端连接R轴电机44,另一端连接位于U型固定架42上的转动件46,R轴电机44通过转动件46带动U轴电机固定架47转动;U轴电机48固定在U轴电机固定架47上,U轴电机48的输出轴朝上连接U轴旋转轴49的底端,U轴旋转轴的49的顶端连接旋转台410,产品定位治具固定在旋转台410上,U轴电机48驱动产品定位治具转动。
较佳的,产品定位治具上设置有用于定位放置产品的放置槽,放置槽依实际产品形状设计专用治具,不同产品加工更换治具即可。
较佳的,产品定位治具包括产品定位块411及压紧装置412,产品定位块411设置在旋转台上,产品定位块设置有通用型产品放置槽,压紧装置412设置在产品放置槽的一侧,压紧装置的一端可伸缩朝向产品放置槽。
较佳的,所述压紧装置412包括固定块4121、活动栓4122、弹簧4123及压紧块4124;固定块4121固定在产品定位块411的一侧,固定块4121上设有供活动栓4122穿过的通孔,活动栓4122的一端穿过固定块4121后与压紧块4124固定在一起,活动栓4122于固定块与压紧块4124之间设置有所述弹簧4123,使用时,将活动栓4122往外拉或将压紧块4124往固定块4121的方向压,弹簧4123压缩,使产品固定块411的空间变大,方便放置产品,产品放置完成后,松开活动栓4122或者压紧块4124,弹簧4123复位,带动压紧块4124将产品压紧在产品固定块411上。
如图18及图19所示,为定位旋转机构的实施例一带动产品旋转倾斜状态的示意图,产品100通过压紧装置412固定在产品定位块411后,R轴电机44转动,使转动件46带动U轴电机固定架47转动,使得直接或者间接设置在U轴电机固定架47上的U轴电机48、U轴旋转轴49、旋转台410、产品定位块411及压紧装置412一并旋转,从而将固定在产品定位块411上的产品100旋转倾斜使产品的端子焊杯开口部倾斜向上后再焊锡,用以进一步提高锡液熔入产品的端子焊杯中。
如图17所示,进一步,本实施例中,所述定位旋转机构还包括R轴感应模组413及U轴感应模组414,R轴感应模组413包括R轴感应器4131及R轴感应片4132,R轴感应器4131设置在U型固定架对应R轴原点位置上,R轴感应片4132设置在联轴器45上,R轴感应片4132旋转感应划过R轴感应器4131,用以感测R轴回到原点位置;U轴感应模组414包括U轴感应器4141及U轴感应片4142,U轴感应器4141设置在U轴电机固定架对应U轴原点位置上,U轴感应片4142设置在U轴旋转轴49上,U轴感应片4142旋转感应划过U轴感应器4141,用以感测U轴回到原点位置。
如图20至图25所示,为定位旋转机构40的实施例二,本实施例与实施例一的结构基本相同,区别在于实施例一中,压紧装置412采用手动按压的方式,其结构简单成本低,而本实施例中,压紧装置415包括气缸4151及连接气缸4151推板的压紧块4152,将产品100靠边放置在产品定位块411上后,通过气缸推动压紧块4152将产品100压紧在产品定位块411上,气缸4151可以带动压紧块4152自动伸缩,方便取放产品,更适合后续与上料机械手匹配作业。
如图24至图25所示,为定位旋转机构40的实施例二带动产品旋转倾斜状态的示意图,通过气缸4151推动压紧块4152将产品100压紧在产品定位块411后,R轴电机44转动,带动产品定位块411旋转,从而将固定在产品定位块411上的产品100旋转倾斜使产品的端子焊杯开口部倾斜向上后再焊锡,用以进一步提高锡液熔入产品的端子焊杯中。
如图26至图28所示,为定位旋转机构50的实施例三,本实施例中,定位旋转机构50包括旋转装置51及产品定位治具;产品定位治具包括产品定位块52及第一压紧装置53,旋转装置51具有驱动机构及连接驱动机构的旋转轴,旋转轴连接产品定位块52,产品定位块52上设置有产品放置槽,第一压紧装置53设置在产品放置槽的一侧,第一压紧装置53包括第一气缸531及第一压紧块532,第一气缸531的推板朝向产品放置槽、且连接第一压紧块532,通过第一气缸531带动第一压紧块532动作可压紧或松开产品100。
较佳的,旋转装置51为旋转电机或旋转气缸。
较佳的,定位旋转机构50还可包括有第二压紧装置54,第二压紧装置54包括第二气缸541及连接第二气缸541的第二压紧块542,第二压紧装置54相对第一压紧装置532水平垂直设置,该第二压紧气缸541的推板朝向产品定位块52、且连接第二压紧块542;第一压紧装置53及第二压紧装置54配合动作可将产品更加准确地靠边定位在产品定位块52上。本发明激光焊锡设备的操作过程及工作原理是:
请主要参阅图1、图10、图11同时配合其他附图所示,使用时,将产品100靠边定位放置在定位旋转机构40的产品定位块411上,压紧装置将产品压紧在产品定位块上,启动本发明激光焊锡设备1;
XY轴移动模组20的Y轴直线模组23、X轴直线模组26联动配合动作带动激光焊锡机构30的相机模组34移动到产品100的其中一排端子的一个端子101上方,激光焊锡机构30的Z轴直线模组32带动相机模组34到适合高度视觉识别定位该端子101;
XY轴移动模组20的Y轴直线模组23、X轴直线模26组联动配合动作带动激光焊锡机构30的激光焊锡组件33到该端子101上方,激光焊锡机构30的Z轴直线模组32带动激光焊锡组件33到适合高度;
激光焊锡组件33的激光头333启动射出一束激光3331到该端子101上预热端子;
激光焊锡组件33的送丝机构334吐出定量锡丝339,与激光3331配合将焊锡熔入该端子101的焊杯中;
送丝机构334定量回抽锡丝339;
激光头333关闭激光,Z轴直线模组32带动激光焊锡组件33抬起;
重复如上步骤,至产品100的其中一排端子的各端子101加工完成;
定位旋转机构带动产品100旋转至适合位置;
开始产品100的下一排端子的各端子101加工,至产品100的所有端子101加工完成;
定位旋转机构的压紧装置打开,取出产品。
如图18至图19及图24至图25所示,进一步,还可在产品的每排端子加工前,定位旋转机构40的R轴电机、U轴电机配合带动产品100倾斜预设角度使产品的端子焊杯开口部倾斜至较佳加工位置后,再进行后续的端子视觉识别、焊锡加工步骤。
当然,在相机模组34视觉识别后,还可进一步通过定位旋转机构40的R轴电机、U轴电机配合调整端子位置。
采用上述方案后,本发明激光焊锡设备具有以下有益效果:
采用激光焊锡工艺,激光光斑可达微米级别且大小可调节,易于加工控制,精度远高于传统烙铁工艺,可适应多种类型产品的焊点,工件加工适应性更强,激光虚焊风险小;激光非接触焊接,不会对产品造成机械损伤;细小的激光束替代烙铁头,在加工件表面有其他干涉物时同样易于加工;激光只对光斑所照射到的部分进行加热,局部温度上升较快,局部加热,热影响区小;在焊锡前,采用激光对加工部位进行预热,提升焊锡效果,在焊锡后,锡丝回抽后,激光加热延迟,可改善焊锡拉丝不良;
XY轴移动模组的X轴直线模组、Y轴直线模组,激光焊锡机构的Z轴直线模组,可采用丝杆型直线模组或同步带型直线模组,可进一步采用精密的直线模组,移动精度可达到±0.01mm,可保证焊锡位置的精度;
送锡机构的送丝电机可采用步进电机或伺服电机以驱动送丝器自动送锡丝,精准控制送锡机构的吐锡量,并通过焊锡时间的控制,确保每次进入端子焊杯的焊锡量一致,无过多的焊熔液溢出端子焊杯外表面而造成端子焊杯外表面污染及镀金层去除不良;
焊锡位置采用相机视觉定位,并通过工控电脑精准控制其他所需机构到达指定位置,产品的每个端子可进一步采用边定位边上锡作业方式,以保证产品的各端子焊杯上锡位置的准确性;
由于连接器的端子焊杯有的是两侧朝向,定位旋转机构设计有旋转轴来达到自动旋转连接器的功能,使连接器的每排端子焊杯调整到适合位置后上锡,进一步,定位旋转机构还可分别设计有R轴旋转和U轴旋转结构,使产品可以在R轴和U轴上旋转,使连接器的每排端子焊杯调整至较佳上锡位置后加工,提高上锡效果;
本发明定位旋转机构的产品定位治具,可依实际产品形状设计专用治具,不同产品加工更换治具即可,也可进一步采用产品定位块及压紧装置,在产品定位块上设置通用型产品放置槽,并采用压紧装置将产品压紧定位在产品定位块上,以适合多各类产品加工制作,无需更换治具,减少换料时间。
本发明激光焊锡设备焊锡位置精准、产品端子焊杯外表面无焊料残留及无损伤外表面镀金层,也不会损伤产品其他位置,可确保产品加工品质,采用自动化设备代替手工操作,可提高产品良率及生产效率;本发明激光焊锡设备还可进一步与机器人或机械手搭配实现全自动化作业;本发明激光焊锡设备焊锡不仅可用于连接器产品的焊接,还可用于其他电子产品的焊接,例如PCB等电路板,针对具体产品,可进一步在定位旋转机构的结构上做适应性优化改进。
上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。