一种机器人自动洗车机
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及洗车设备技术领域,具体涉及一种机器人自动洗车机。
背景技术
随着人们生活的不断提高,汽车保有辆越来越多,对洗车需求也越来越多。传统的洗车一般是依靠人工进行清洗,清洗效率极低。因此,为了提高清洗效率,行业内研发了很多自动洗车机,而这些自动洗车机需要较大的空间,无法实现在停车位上进行洗车。
例如,申请号为CN201910479520.8、公开日为2019年9月10日的中国专利申请文件就公开了一种洗车机器人,其包括行走底盘、设置在行走底盘上方的升降平台、设置在升降平台上的机械手以及设置在机械手操作端的洗刷组件,还包括图像采集装置、距离监测装置以及控制装置。通过采用该洗车机器人,可以实现了洗车作业的自动化,降低了洗车作业的劳动强度。但是,该洗车机器人在进行洗车的过程中需要在车的四周移动才能完成整辆车的清洗工作,这就使得所清洗车辆的四周必须要留有一定的空间,从而导致该洗车机器人无法进行车库、停车场等场所的停车位上的洗车作业。
有鉴于此,本发明人针对现有洗车设备存在的问题而深入构思,且积极研发,遂产生本案。
发明内容
本发明的目的在于提供一种机器人自动洗车机,其可以实现车库、停车场等场所的停车位上的洗车作业,提高车主洗车的便捷性。
为实现上述目的,本发明采用的技术方案是:
一种机器人自动洗车机,其包括车本体以及配合在车体上的移动机构、洗车机构和废水回收机构,
所述车体上设有控制机箱,下方设有车轮,控制机箱用于控制车体的移动、洗车机构的具体清洗动作以及污水回收机构的回收操作;
所述移动机构包括多级平移机构和两组多轴机械手臂,所述多级平移机构包括两组平移组件、驱动组件和连接杆,所述连接杆用于连接两组多轴机械手臂,而多轴机械手臂与洗车机构连接;每一平移组件包括至少两级滑动模组,而每级滑动模组包括滑座以及配合在滑座上的滑轨,所述第一级滑动模组的滑杆与连接杆连接,最后一级滑动模组的滑座固定在车体上,其他每一级滑动模组的滑座与下一级滑动模组的滑轨连接;
所述驱动组件包括至少两级连接控制机箱的驱动电机以及连接在驱动电机上并与滑动模组配合的传动结构;所述驱动电机的数量与滑动模组的级数对应,每一驱动电机驱动两平移组件的一级滑动模组;
所述清洗机构的数量设置为两组,其分别连接两个多轴机械手臂,用于共同清洗车辆的上方,以及分别用于清洗车辆的两侧。
所述驱动组件的传动结构包括与驱动电机连接的传动杆,以及连接在传动杆两端的传动齿轮,相应地,在每一级滑动模组上设有与该传动齿轮配合齿条。
所述污水回收机构包括污水储存箱、一个污水接收槽、两个污水接收装置和两个污水收集装置,
污水接收槽则连接在车体的前端,用于在洗车时接收车辆前端或后端流下来的污水;两个污水接收装置设置在车体上并分别与两个污水收集装置配合;
所述污水收集装置包括污水回收支架、柔性支撑件、强吸水软材料条、长条状气囊,污水回收支架上安装有回收驱动电机、连接该回收驱动电机的回收轮以及挤压装置,挤压装置设置在回收轮下方,并置于污水接收装置上方;
所述强吸水软材料条连接在柔性支撑件上,且与柔性支撑件等长,并与柔性支撑件共同收卷在回收轮上;所述柔性支撑件一端连接在回收轮上,另一端设有气囊,该气囊为倾斜设置,其高度由其与柔性支撑件的连接端向另一端逐渐增加;所述气囊设有进气口,该进气口通过气道连接至气泵,所述气道设置在柔性支撑件上,所述充气泵安装在车体上。
所述挤压装置包括一设置在污水回收支架上的托辊,在强吸水软材料条收卷或伸出时,柔性支撑件和强吸水软材料条经过该托辊上端面;所述污水回收支架的上方设有一安装槽,回收轮活动设置在该安装槽上,收卷在所述回收轮的柔性支撑件的下端面与托辊之间的间距小于强吸水软材料条的厚度。
所述污水回收支架下端连接间距调节装置,所述间距调节装置用于两个污水收集装置之间的间距,其包括调节安装座和连接控制机箱的调节电机,所述调节安装座上设有滑槽,所述滑槽内设有一连接调节电机的滑块,所述滑块与所述污水回收支架连接。
所述清洗机构包括清水储存箱、毛刷、毛刷驱动器、冲水装置和吹干风刀,所述清水储存箱设置在车体上,所述毛刷、冲水装置和吹干风刀依次设置在多轴机械手的端部;
所述毛刷连接毛刷驱动器,而毛刷驱动器连接控制机箱;所述吹干风刀连接有风机;所述冲水装置通过管路连接到清水存储箱,所述冲水装置包括冲水安装座、设置在冲水安装座上的出水管以及设置在出水管上的多个出水嘴。
所述出水嘴上设有一单向阀,所述出水管内的水利用水压打开单向阀进入出水嘴。
所述冲水装置上还设有角度调节结构,所述角度调节结构包括调角度主动齿轮、调角度从动齿轮和调角度电机,所述调角度电机安装在安装座上,且其连接调角度主动齿轮,调角度从动齿轮套设在出水管上,并与调角度主动齿轮进行啮合。
所述毛刷的刷毛为倾斜设置在毛刷上。
所述洗车机还包括驾驶系统,该驾驶系统设置在车体上。
采用上述方案后,采用本发明的机器人自动洗车机进行车辆清洗时,只需要将该洗车机移动至清洗车辆的前端或后端,然后控制机箱将控制多级平移机构和多轴机械手臂,使清洗机构对清洗车辆的不同位置进行清洗。该清洗机器人清洗时,无需行走到车辆的侧边,所以该清洗机器人可以在多辆车并排停放时洗车,在地下车库也行,对于车主而言,洗车不再前往洗车场,节约时间和能源,提高洗车的便捷性。
附图说明
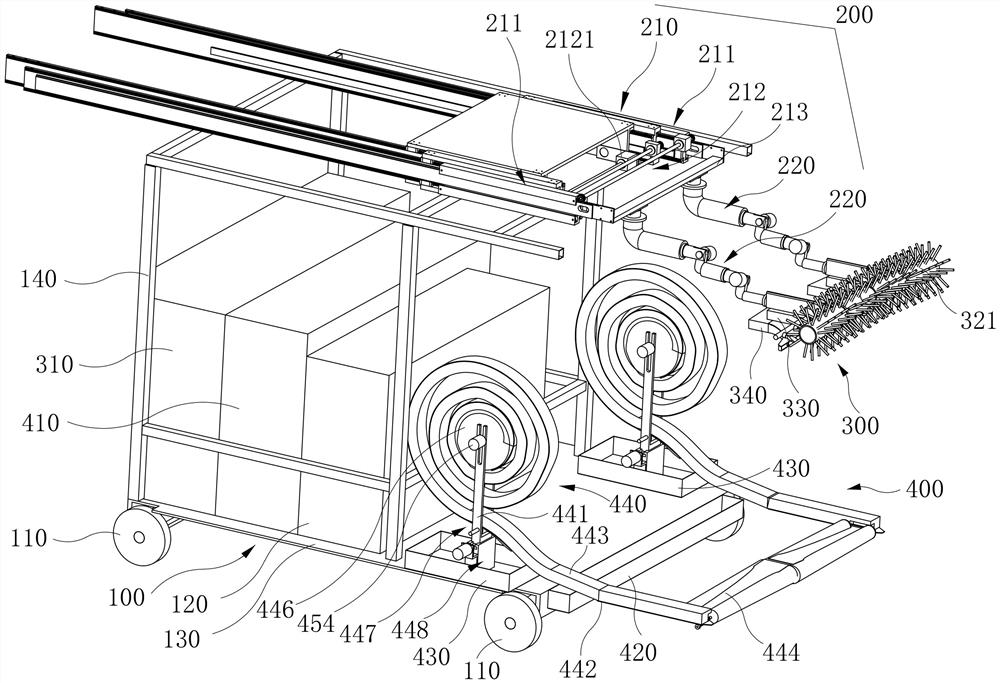
图1-2为本发明洗车机的整体示意图;
图3为本发明洗车机的移动机构示意图;
图4为图3的局部放大图;
图5-6为本发明清洗机构的结构示意图;
图7-8为本发明的冲水装置结构示意图;
图9为污水收集装置的结构示意图;
图10为柔性支撑件的结构示意图。
标号说明:
车体100;车轮110;控制机箱120;支撑板130;支撑架140;
移动机构200;多级平移机构210;平移组件211;第一级滑动模组21101;第二级滑动模组21102;第三级滑动模组21103;滑座2111;滑轨2112;齿条2113;驱动组件212;驱动电机2121;第一级驱动电机21201;第二级驱动电机21202;第三级驱动电机21203;传动结构2122;传动杆21221;传动齿轮21222;
清洗机构300;清水储存箱310;毛刷321;毛刷驱动器322;冲水装置330;出水管331;进水口3311;出水嘴332;角度调节装置333;调角度电机3331;调角度主动齿轮3332;调角度从动齿轮3333;冲水安装座334;
污水回收机构400;污水储存箱410;污水接收槽420;污水接收装置430;污水收集装置440;污水回收支架441;安装槽4411;柔性支撑件442;强吸水软材料条443;气囊444;回收驱动电机445;回收轮446;挤压装置447;托辊4471;间距调节装置448;调节安装座4481;滑块4482;滑槽4483;调节电机4484。
具体实施方式
本发明揭示了一种机器人自动洗车机,其包括车体100以及配合在车体100上的洗车机构、移动机构200和污水回收机构400。
其中,车体100上设有控制机箱120,下方设有车轮110,控制机箱120用于控制车体100的移动、洗车机构的具体清洗动作以及污水回收机构400的回收操作。具体地,车体100包括承载控制机箱120的支撑板130以及连接在支撑板130上的支撑架140,车轮110连接在支撑板130的下方。本实施例中车轮110总共设置为四个,且四个车轮110均为万向轮,以便洗车机能够进行多方向转动。在本实施例中,车轮110为电力驱动,即车轮110连接有行走驱动件,在该驱动件的驱动下车轮110进行转动,从而带动车体100进行转向以及行走,该驱动件连接控制机箱120,受控制机箱120的控制。当然,车体100下方的车轮110也可以在外力作用下进行转动,进带动车体100转向及行走。
移动机构200包括多级平移机构210和两组多轴机械手臂。其中,多级平移机构210包括两组平移组件211、驱动组件212和连接杆,其中,连接杆用于连接两组多轴机械手臂,而多轴机械手臂与洗车机构连接。每一平移组件211包括至少两级滑动模组,而每级滑动模组包括滑座2111以及配合在滑座2111上的滑轨2112,其中,第一级滑动模组21101的滑杆与连接杆连接,最后一级滑动模组的滑座2111固定在车体100上,其他每一级滑动模组的滑座2111与下一级滑动模组的滑轨2112连接。而驱动组件212包括至少两级连接控制机箱120的驱动电机2121以及连接在驱动电机2121上并与滑动模组配合的传动结构2122。驱动电机2121的数量与滑动模组的级数相对应,每一驱动电机2121驱动两平移组件211的一级滑动模组。
本实施例中,每一平移组件211设置有三级滑动模组,分别为第一级滑动模组21101、第二级滑动模组21102和第三滑动模组,其中,第一级滑动模组21101的滑轨2112与连接杆连接,滑座2111则与第二级滑动模组21102的滑轨2112连接;第二级滑动模组21102的滑座2111与第三级滑动模组21103的滑轨2112连接,而第三级滑动模组21103的滑座2111固定在车体100的支撑架140上。相应地,驱动组件212亦设有三级驱动电机2121,分别为第一级驱动电机21201、第二级驱动电机21202、第三级驱动电机21203,第一级驱动电机21201用于驱动第一级滑动模组21101,第二级驱动组件212用于驱动第二级滑动模组21102,第三级驱动组件212用于驱动第三级滑动模组21103。本实施例中,驱动组件212中的驱动电机通过齿轮传动的方式驱动滑动模组,所以,驱动组件212的传动结构2122包括与驱动电机连接的传动杆21221,以及连接在传动杆21221两端的传动齿轮21222,相应地,在每一级滑动模组上设有与该传动齿轮21222配合齿条2113。
本实施例中,控制机箱120通过控制第一级驱动电机21201、第二级驱动、第三驱动电机的工作状态,进而控制连接在多轴机械手臂上的洗车机构在车辆上的洗车位置。具体地,第一级驱动电机21201启动后,会驱动连接在该第一级驱动电机21201上的传动杆21221和传动齿轮21222转动,传动齿轮21222转动时,驱动第一级滑动模组21101的滑轨2112相对于其滑座2111移动,因为第一级滑动模组21101的滑轨2112与连接杆连接,所以,连接杆以及连接在连接杆上的多轴机械手臂会随之一起移动。第二级驱动电机21202启动后,会驱动连接在该第二级驱动电机21202上的传动杆21221和传动齿轮21222转动,传动齿轮21222转动时,驱动第二级滑动模组21102的滑轨2112相对于其滑座2111移动,由于第一级滑动模组21101的滑座2111连接在第二级滑动模组21102的滑轨2112上,所以第二级滑动模组21102的滑轨2112移动时,会带动整个第一级滑动模组21101一起移动。第三级驱动电机21203启动后,会驱动连接在该第三级驱动电机21203上的传动杆21221和传动齿轮21222转动,传动齿轮21222转动时,驱动第三级滑动模组21103的滑轨2112相对于其滑座2111移动,由于第二级滑动模组21102的滑座2111连接在第三级滑动模组21103的滑轨2112上,所以第三级滑动模组21103的滑轨2112移动时,会带动整个第二级滑动模组21102以及第一级滑动模组21101一起移动。三级驱动电机均启动运转的情况下,洗车机构可以到达最远距离。
本实施例中,清洗机构300的数量设置为两组,其分别连接两个多轴机械手臂,用于共同清洗车辆的上方,以及分别用于清洗车辆的两侧。每一组清洗机构300包括清水储存箱310、毛刷321、毛刷321驱动器322、冲水装置330和吹干风刀,所述清水储存箱310设置在车体100上,具体设置在车体100的支撑板130上,毛刷321、冲水装置330和吹干风刀依次设置在多轴机械手的端部。其中,毛刷321连接毛刷321驱动器322,而毛刷321驱动器322连接控制机箱120,在清洗车辆的过程中,毛刷321在毛刷321驱动器322的作用下转动,进而对车辆进行清洗。为提高清洗效果,毛刷321的刷毛为倾斜设置在毛刷321上,即刷毛为斜刷毛。吹干风刀连接有风机,使吹干风刀能够产生风力对清洗过的车表面进行吹干。
冲水装置330通过管路连接到清水存储箱,冲水装置330包括冲水安装座334、设置在冲水安装座334上的出水管331以及设置在出水管331上的多个出水嘴332,每一出水嘴332上设有一单向阀。出水管331上设有进水口3311,该进水口3311上设有打开或关闭进水口3311的电磁阀,该电磁阀与控制机箱120连接,进水口3311通过管路与清水储存箱310连接。利用水泵将清水储存箱310中的水抽水至进水口3311,电磁阀控制通断,电磁阀打开,喷水口喷水。电磁阀关闭后,出水管331中仍然有水,通过喷水口与水管之间加装单向阀,电磁阀关闭后,出水管里水压降低,单向阀封闭,水就不再从喷水口里滴出,确保在清洗机构300在转移或回收时,洗过的车表面不会有水滴。
为了提高洗车效果,冲水装置330上还设有角度调节结构,该角度调节结构包括调角度主动齿轮3332、调角度从动齿轮3333和调角度电机3331,所述调角度电机3331安装在安装座上,且其连接调角度主动齿轮3332,调角度从动齿轮3333套设在出水管331上,并与调角度主动齿轮3332进行啮合。当调角度电机3331通过调角度主动齿轮3332和调角度从动齿轮3333带动出水管331转动,从而调节安装在出水管331上的出水嘴332的喷水角度。
污水回收机构400包括污水储存箱410、一个污水接收槽420、两个污水接收装置430和两个污水收集装置440;污水接收槽420则连接在车体100的前端,用于在洗车时接收车辆前端或后端流下来的污水;两个污水接收装置430设置在车体100上并分别与两个污水收集装置440配合。两个污水收集装置440分别为第一污水收集装置440和第二污水收集装置440,两个污水收集装置440结构相同,所以以下仅介绍第一污水收集装置440的结构,第二污水收集装置440的结构不再进行赘述。
第一污水收集装置440包括污水回收支架441、柔性支撑件442、强吸水软材料条443、长条状气囊444,污水回收支架441上安装有回收驱动电机445、连接该回收驱动电机445的回收轮446以及挤压装置447,挤压装置447设置在回收轮446下方,并置于污水接收装置430。强吸水软材料条443连接在柔性支撑件442上,且与柔性支撑件442等长,并与柔性支撑件442共同收卷在回收轮446上柔性支撑件442一端连接在回收轮446上,另一端设有气囊444,该气囊444为倾斜设置,其高度由其与柔性支撑件442的连接端向另一端逐渐增加。该气囊444设有进气口,该进气口通过气道连接至气泵,所述气道设置在柔性支撑件442上,所述充气泵安装在车体100上。本实施例中,柔性支撑件442采用柔性玻璃钢,其具备柔韧性和具有一定的支撑强度。强吸水软材料条采用海绵条实现。气囊444只有在清洗车辆时才会进行充气。
在清洗车辆之前,回收驱动电机445会驱动回收轮446,从而将第一污水收集装置440和第二污水收集装置440的柔性支撑件442以及强吸水软材料条443送出至车辆两侧,用于车辆的侧边的污水收集。同时,气泵会对气囊444进行充气,第一污水收集装置440和第二污水收集装置440的气囊444充气后,会共同设置在清洗车辆的前端或后端,车辆前端或后端产生的污水会会流向气囊444,然后流向强吸水软材料条443,并存储在强吸水软材料条443中。当车辆清洗完毕后,将气囊444进行放气,回收驱动电机445带动回收轮446转动,进而将柔性支撑件442和强吸水软材料条443进行收卷,当强吸水软材料条443经过挤压装置447时,挤压装置447将强吸水软材料条443中的污水挤出,挤出的污水会流向第一污水收集槽和第二污水收集槽,然后在水泵的作用下收集至污水储存箱410内。
挤压装置447可以采用两个挤压辊对压的结构对强吸水软材料条443进行挤压,也可以采用其他结构,只要将强吸水软材料条443中的污水挤压出来即可。本实施例中,挤压装置447包括一设置在污水回收支架441上的托辊4471,在收卷或伸出时,伸出时,柔性支撑件442和强吸水软材料条443都会经过该托辊4471上端面。本实施例主要是利用收卷在回收轮446上的柔性支撑件442和强吸水软材料条443的自重与该托辊4471进行配合,从而对强吸水软材料条443进行挤压。具体地,在污水回收支架441的上方设有一安装槽4411,回收轮446活动设置在该安装槽4411上,收卷在所述回收轮446的柔性支撑件442的下端面与托辊4471之间的间距小于强吸水软材料条443的厚度,所以才会对回收的强吸水软材料条443进行挤压。当柔性支撑件442及强吸水软材料条443伸出的过程中,回收轮446会在安装槽4411上下移;当柔性支撑件442及强吸水软材料条443回收时,回收轮446上收卷的厚度增加,回收轮446会在安装槽4411上上移。
本实施例中,污水回收支架441下端连接间距调节装置448,所述间距调节装置448用于两个污水收集装置440之间的间距,使洗车机能够对不同车型的车进行清洗,所述间距调节装置448包括调节安装座4481和连接控制机箱120的调节电机4484,所述调节安装座4481上设有滑槽4483,所述滑槽4483内设有一连接调节电机4484的滑块4482,所述滑块4482与所述污水回收支架441连接。当车辆尺寸与两污水收集装置440之间的距离不匹配时,通过启动调节电机4484带动滑块4482在滑槽4483上滑动,进而带动回收支撑架140滑动,从而实现两污水收集装置440之间的尺寸调节。
机器人自动洗车机的车体100上还可以设置驾驶系统,工作人员可以通过该驾驶系统直接驾驶该洗车机。
采用本发明的机器人自动洗车机进行车辆清洗时,只需要将该洗车机移动至清洗车辆的前端(后端也可以),使车体100前端的第三污水接收槽420对其到清洗车辆的前端,然后将两个气囊444送至清洗车辆的前端,使强吸水软材料条443分别设于清洗车辆的左右两侧,并对气囊444充气。完成这些准备工作后,控制机箱120将控制多级平移机构210和多轴机械手臂,使清洗机构300对清洗车辆的不同位置进行清洗。清洗机构300清洗时,喷水装置在车表面喷水同时毛刷321转动,使车表面的污物与水相混合,而此时,吹干风刀的风力驱动污水不断向前,最终掉落在强吸水软材料条443上,强吸水软材料条443回收时则将污水有效回收,避免污水流向地面。该清洗机器人清洗时,无需行走到车辆的侧边,所以该清洗机器人可以在多辆车并排停放时洗车,在地下车库也行,对于车主而言,洗车不再前往洗车场,节约时间和能源,提高洗车的便捷性。
以上所述,仅是本发明实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 用于自动洗车的工业机器人控制方法和自动洗车机
- 一种智能化自动洗车机器人