一种悬臂式机械手臂
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及机械手臂技术领域,具体为一种悬臂式机械手臂。
背景技术
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影,尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业,而现有技术中的悬臂式机械手臂在实际应用时还存在诸多的不足,例如:
现有技术中的机械手臂在实际应用时由于组装结构的限制极大降低了机械手臂输送过程中的翻转应用,从而使得机械手臂在输送斜向物料时存在极大的困难,故而满足不了现有技术所需。
发明内容
本发明的目的在于提供一种悬臂式机械手臂,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种悬臂式机械手臂,包括底座、支撑柱以及悬臂架,所述底座上表面中部靠近一端处通过螺栓固定连接有支撑柱,所述支撑柱外围靠近底端与顶端处均通过螺栓固定连接有限位架,两个所述限位架之间的支撑柱外围通过螺栓固定连接有齿轮环,两个所述限位架之间的支撑柱外围套接有固定座,所述固定座内壁上表面靠近一端处通过螺栓固定连接有第一电机,所述第一电机动力输出端通过螺栓固定连接有齿轮,所述齿轮与齿轮环啮合,所述固定座外围一侧中部通过螺栓固定连接有悬臂架,所述悬臂架一端通过螺栓固定连接有固定块,所述固定块内壁底端通过螺栓固定连接有第二电机,所述第二电机动力输出端贯穿固定块通过联轴器与法兰螺栓固定连接有螺纹杆,两个所述螺纹杆外围均螺纹套接有连接件,两个所述连接件相邻端通过螺栓固定连接有螺纹组件,所述螺纹组件外围螺纹套接有移动平台。
优选的,所述底座内壁下表面中部通过螺栓固定连接有蓄电池,所述底座上表面中部靠近一端边缘处螺纹插接有丝杆,所述丝杆外围顶端通过轴承转动连接有控制器。
优选的,所述底座呈直角梯形结构,所述底座一端中部通过螺栓固定连接有盖板,所述盖板与底座相邻面之间镶嵌有密封圈。
优选的,所述限位架呈空心圆台型结构,所述限位架共设有四个,所述限位架一侧均匀镶嵌有钢珠,所述固定座通过钢珠在两个限位架之间滑动。
优选的,所述固定座内壁一侧中部靠近顶端与底端处均通过螺丝固定连接有红外传感器,所述齿轮环上表面与下表面的支撑柱外围均匀等距的通过螺丝固定连接有定位片,所述红外传感器轴心线与定位片中心线位于同一直线上,所述红外传感器输入端与蓄电池输出端电性连接,且红外传感器输出端与控制器输入端电信号连接。
优选的,所述连接件与螺纹组件相邻端通过螺栓固定连接有万向节,所述连接件通过万向节与螺纹组件活动链接,所述螺纹组件由多个螺纹支杆通过插销与螺丝固定连接构成。
优选的,所述移动平台呈凸字型结构,所述移动平台内部通过螺栓固定连接有第三电机,第三电机动力输出端通过螺栓固定连接有齿轮盘,且齿轮盘与螺纹组件啮合。
优选的,所述悬臂架一侧中部开设有滑槽,所述滑槽内部滑动连接有滑块,所述滑块一端通过螺栓与连接件固定连接,所述支撑柱顶端通过螺栓固定连接防护罩。
与现有技术相比,本发明的有益效果是:
本发明通过转动丝杆调节控制器在底座上的位置高度从而能够有效的满足各位置高度的用户实施操控进而起到灵活控制调整的效果,通过控制器启动两个固定座内的第一电机,使得第一电机驱动齿轮促使齿轮与齿轮环之间的螺纹啮合力实现固定座在通过相邻两个限位架实施限位转动,从而能够有效的带动两个悬臂架实施定向转动,从而使得移动平台能够有效的借助螺纹组件通过连接件在螺纹杆上实施位移,同时通过控制器启动第二电机使得螺纹杆驱动连接件促使移动平台在水平上上实施位移调整,通过控制器启动第三电机使得移动平台能够有效的通过齿轮盘在螺纹组件上实施位移,进而有效的提升了移动平台在立体面上的各位置实施位移调整,通过控制器反向控制两个第一电机能够有效的使得两个悬臂架实施反向位移,从而使得两个连接件上的螺纹组件能够实施长度重组进而促使移动平台实施翻折,使得用户在实际操控时得以更加灵活多变进而有效的适应了复杂场景下的应用,通过在悬臂架上的滑槽内设有的滑块能够有效的限定螺纹组件始终保持竖直排布,进而有效的限定了移动平台在立体面上的位移输送从而有效的满足了多形态应用的效果进而有效的弥补了现有技术中的不足。
附图说明
图1为本发明整体半剖结构示意图;
图2为本发明底座半剖结构示意图;
图3为图2中A处放大结构示意图;
图4为本发明悬臂架半剖结构示意图;
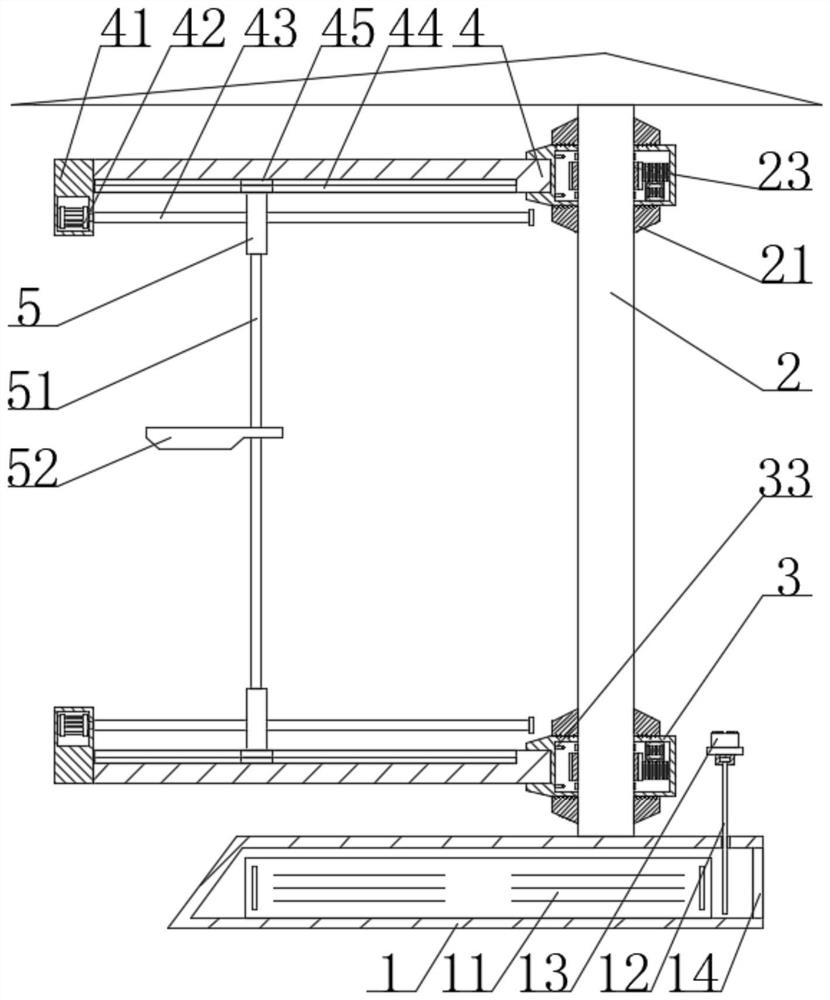
图5为本发明主视结构示意图。
图中:1-底座;11-蓄电池;12-丝杆;13-控制器;14-盖板;2-支撑柱;21-限位架;22-钢珠;23-齿轮环;3-固定座;31-第一电机;32-齿轮;33-红外传感器;34-定位片;4-悬臂架;41-固定块;42-第二电机;43-螺纹杆;44-滑槽;45-滑块;5-连接件;51-螺纹组件;52-移动平台。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一:
请参阅图1-5,本发明提供一种技术方案:一种悬臂式机械手臂,包括底座1、支撑柱2以及悬臂架4,所述底座1呈直角梯形结构,且底座1下表面开设有防滑纹,所述底座1内壁下表面中部通过螺栓固定连接有蓄电池11,通过蓄电池11能够有效的提供电能,所述底座1上表面中部靠近一端边缘处螺纹插接有丝杆12,所述丝杆12外围顶端通过轴承转动连接有控制器13,通过丝杆12能够有效的驱动控制器13在底座1上的位置实施抬升,从而方便不同升高位置的用户实施操控,所述底座1一端中部通过螺栓固定连接有盖板14,所述盖板14与底座1相邻面之间镶嵌有密封圈,通过盖板14能够有效的对底座1内部设备进行防护,所述底座1上表面中部靠近一端处通过螺栓固定连接有支撑柱2,所述支撑柱2呈圆柱形结构,所述支撑柱2外围靠近底端与顶端处均通过螺栓固定连接有限位架21,所述限位架21呈空心圆台型结构,所述限位架21共设有四个,所述限位架21一侧均匀镶嵌有钢珠22,所述固定座3通过钢珠22在两个限位架21之间滑动,通过钢珠22能够有效的降低限位架21与固定座3之间的磨损,两个所述限位架21之间的支撑柱2外围通过螺栓固定连接有齿轮环23,两个所述限位架21之间的支撑柱2外围套接有固定座3,所述固定座3内壁上表面靠近一端处通过螺栓固定连接有第一电机31,第一电机31输入端与蓄电池11输出端和控制器13输出端电性连接,所述第一电机31动力输出端通过螺栓固定连接有齿轮32,所述齿轮32与齿轮环23啮合,通过第一电机31驱动齿轮32能够通过齿轮32与齿轮环23的啮合力实现固定座3在支撑柱2外围实施转动,且转动角度范围270度以内,所述固定座3内壁一侧中部靠近顶端与底端处均通过螺丝固定连接有红外传感器33,所述齿轮环23上表面与下表面的支撑柱2外围均匀等距的通过螺丝固定连接有定位片34,所述红外传感器33轴心线与定位片34中心线位于同一直线上,通过定位片34使得红外传感器33通过固定座3在支撑柱2外围各角度位置实施转动时能够有效的检测角度位置,从而便于用户通过控制器13实施转动控制,所述红外传感器33输入端与蓄电池11输出端电性连接,且红外传感器33输出端与控制器13输入端电信号连接,所述固定座3外围一侧中部通过螺栓固定连接有悬臂架4,所述悬臂架4一端通过螺栓固定连接有固定块41,所述固定块41内壁底端通过螺栓固定连接有第二电机42,所述第二电机42输入端与蓄电池11输出端和控制器13输出端电性连接,所述第二电机42动力输出端贯穿固定块41通过联轴器与法兰螺栓固定连接有螺纹杆43,两个所述螺纹杆43外围均螺纹套接有连接件5,通过第二电机42驱动螺纹杆43能够有效的通过螺纹杆43与连接件5之间的螺纹啮合力实现水平位置调整,两个所述连接件5相邻端通过螺栓固定连接有螺纹组件51,所述螺纹组件51由多个螺纹支杆通过插销与螺丝固定连接构成,从而使得两个悬臂架4在反向转动时能够有效的调整螺纹组件51的长度从而适应两个悬臂架4的偏转位置,进而使得移动平台52能够有效的实现偏位调整,所述连接件5与螺纹组件51相邻端通过螺栓固定连接有万向节,所述连接件5通过万向节与螺纹组件51活动链接,通过万向节能够有效的满足螺纹组件51在连接件5上实施偏转,所述螺纹组件51外围螺纹套接有移动平台52,所述移动平台52呈凸字型结构,通过移动平台52能够有效的实施物体承载,所述移动平台52内部通过螺栓固定连接有第三电机,第三电机动力输出端通过螺栓固定连接有齿轮盘,且齿轮盘与螺纹组件51啮合,通过第三电机驱动齿轮盘能够有效的利用与螺纹组件51的啮合力实现螺纹组件51轴线方向上的移动调整。
实施例二:
请参阅图1-5,本发明提供一种技术方案:一种悬臂式机械手臂,包括底座1、支撑柱2以及悬臂架4,所述底座1呈直角梯形结构,且底座1下表面开设有防滑纹,所述底座1内壁下表面中部通过螺栓固定连接有蓄电池11,通过蓄电池11能够有效的提供电能,所述底座1上表面中部靠近一端边缘处螺纹插接有丝杆12,所述丝杆12外围顶端通过轴承转动连接有控制器13,通过丝杆12能够有效的驱动控制器13在底座1上的位置实施抬升,从而方便不同升高位置的用户实施操控,所述底座1一端中部通过螺栓固定连接有盖板14,所述盖板14与底座1相邻面之间镶嵌有密封圈,通过盖板14能够有效的对底座1内部设备进行防护,所述底座1上表面中部靠近一端处通过螺栓固定连接有支撑柱2,所述支撑柱2呈圆柱形结构,所述支撑柱2外围靠近底端与顶端处均通过螺栓固定连接有限位架21,所述限位架21呈空心圆台型结构,所述限位架21共设有四个,所述限位架21一侧均匀镶嵌有钢珠22,所述固定座3通过钢珠22在两个限位架21之间滑动,通过钢珠22能够有效的降低限位架21与固定座3之间的磨损,两个所述限位架21之间的支撑柱2外围通过螺栓固定连接有齿轮环23,两个所述限位架21之间的支撑柱2外围套接有固定座3,所述固定座3内壁上表面靠近一端处通过螺栓固定连接有第一电机31,第一电机31输入端与蓄电池11输出端和控制器13输出端电性连接,所述第一电机31动力输出端通过螺栓固定连接有齿轮32,所述齿轮32与齿轮环23啮合,通过第一电机31驱动齿轮32能够通过齿轮32与齿轮环23的啮合力实现固定座3在支撑柱2外围实施转动,且转动角度范围270度以内,所述固定座3内壁一侧中部靠近顶端与底端处均通过螺丝固定连接有红外传感器33,所述齿轮环23上表面与下表面的支撑柱2外围均匀等距的通过螺丝固定连接有定位片34,所述红外传感器33轴心线与定位片34中心线位于同一直线上,通过定位片34使得红外传感器33通过固定座3在支撑柱2外围各角度位置实施转动时能够有效的检测角度位置,从而便于用户通过控制器13实施转动控制,所述红外传感器33输入端与蓄电池11输出端电性连接,且红外传感器33输出端与控制器13输入端电信号连接,所述固定座3外围一侧中部通过螺栓固定连接有悬臂架4,所述悬臂架4一端通过螺栓固定连接有固定块41,所述固定块41内壁底端通过螺栓固定连接有第二电机42,所述第二电机42输入端与蓄电池11输出端和控制器13输出端电性连接,所述第二电机42动力输出端贯穿固定块41通过联轴器与法兰螺栓固定连接有螺纹杆43,两个所述螺纹杆43外围均螺纹套接有连接件5,通过第二电机42驱动螺纹杆43能够有效的通过螺纹杆43与连接件5之间的螺纹啮合力实现水平位置调整,两个所述连接件5相邻端通过螺栓固定连接有螺纹组件51,所述螺纹组件51由多个螺纹支杆通过插销与螺丝固定连接构成,从而使得两个悬臂架4在反向转动时能够有效的调整螺纹组件51的长度从而适应两个悬臂架4的偏转位置,进而使得移动平台52能够有效的实现偏位调整,所述连接件5与螺纹组件51相邻端通过螺栓固定连接有万向节,所述连接件5通过万向节与螺纹组件51活动链接,通过万向节能够有效的满足螺纹组件51在连接件5上实施偏转,所述螺纹组件51外围螺纹套接有移动平台52,所述移动平台52呈凸字型结构,通过移动平台52能够有效的实施物体承载,所述移动平台52内部通过螺栓固定连接有第三电机,第三电机动力输出端通过螺栓固定连接有齿轮盘,且齿轮盘与螺纹组件51啮合,通过第三电机驱动齿轮盘能够有效的利用与螺纹组件51的啮合力实现螺纹组件51轴线方向上的移动调整,所述悬臂架4一侧中部开设有滑槽44,所述滑槽44内部滑动连接有滑块45,所述滑块45一端通过螺栓与连接件5固定连接,通过滑块45能够有效的限定连接件5的竖直方向,从而实现对移动平台5所处位置实施限位,从而有效的限定两个悬臂架4实施同步和同向转动效果,所述支撑柱2顶端通过螺栓固定连接防护罩,防护罩呈四棱锥型结构。
工作原理:在使用时通过转动丝杆12调节控制器13在底座1上的位置高度从而能够有效的满足各位置高度的用户实施操控进而起到灵活控制调整的效果,通过控制器13启动两个固定座3内的第一电机31,使得第一电机31驱动齿轮32促使齿轮32与齿轮环23之间的螺纹啮合力实现固定座3在通过相邻两个限位架21实施限位转动,从而能够有效的带动两个悬臂架4实施定向转动,从而使得移动平台5能够有效的借助螺纹组件51通过连接件5在螺纹杆43上实施位移,同时通过控制器13启动第二电机42使得螺纹杆43驱动连接件5促使移动平台52在水平上上实施位移调整,通过控制器13启动第三电机使得移动平台52能够有效的通过齿轮盘在螺纹组件51上实施位移,进而有效的提升了移动平台在立体面上的各位置实施位移调整,通过控制器13反向控制两个第一电机31能够有效的使得两个悬臂架4实施反向位移,从而使得两个连接件5上的螺纹组件51能够实施长度重组进而促使移动平台52实施翻折,使得用户在实际操控时得以更加灵活多变进而有效的适应了复杂场景下的应用,通过在悬臂架4上的滑槽44内设有的滑块45能够有效的限定螺纹组件51始终保持竖直排布,进而有效的限定了移动平台52在立体面上的位移输送从而有效的满足了多形态应用的效果。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。