校正粒子衍射图像图案中心和欧拉角的方法、系统及介质
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及图像处理领域,具体地,涉及一种校正粒子衍射图像图案中心和欧拉角的方法、系统及介质。
背景技术
粒子衍射技术包含X射线衍射,电子背散射衍射,透射电子衍射,中子衍射等。各种衍射技术以其非破坏性、易于自动化、高分辨率、高速度和丰富的观测结果,在各种工程材料检测和学术研究得到了广泛的应用。在扫描电子显微镜(SEM)中,入射于样品上的电子束与样品作用产生几种不同效应,其中之一就是在每一个晶粒内规则排列的晶格面上产生衍射。其中的电子背散射衍射技术(EBSD)装备小巧,能快速给出晶体种类、取向、晶粒大小、变形程度等信息,是材料、地质等领域广泛应用的技术。本说明书以电子背散射衍射技术为例,介绍本发明分析粒子衍射数据的体系、原理与优势。
电子背散射衍射技术中,电子束经过加速,射入样品表面,经过与样品组成原子的复杂作用,最终有部分电子射出样品表面,且电子出射的角度和样品晶面间距符合布拉格衍射方程,从而在屏幕上形成特征性的电子衍射图案,亦称菊池图、衍射花样。可参考专利文献CN105651792A公开的一种扫描电镜中透射电子菊池衍射装置及分析方法。
菊池图的位置、方向与六个参数最为密切,分别是表征晶体坐标系与样品坐标系相对转动的三个欧拉角,和作用体积相对于屏幕的三维空间坐标(图案中心,见图1)。欧拉角可以表征晶体材料的局部变形和旋转,但目前业界EBSD探测欧拉角有着0.5°左右的误差,从而限制了其展现样品精细结构的能力。图案中心是重要的几何参数,其精确度对EBSD观测数据的准确性有着很大的影响。业界存在一些校正EBSD、测量图案中心的方法,但该类方法或依赖于特定的硬件,例如在屏幕前加圆形罩子,从而影响菊池图的质量;或依赖于繁琐的优化算法,耗时长计算量大,且精确度并未达到最优。因此,急需一种简单易行且精确的校正粒子衍射图像图案中心和欧拉角的方法。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种校正粒子衍射图像图案中心和欧拉角的方法、系统及介质。
根据本发明提供的一种校正粒子衍射图像图案中心和欧拉角的方法,包括:
图案获取步骤:获取通过粒子衍射得到的晶体的实验衍射花样,以及通过计算模拟获取所述晶体所对应的标准图案;
配准步骤:将所述标准图案与所述实验衍射花样配准,配准过程中通过目标函数来表征所述标准图案与所述实验衍射花样的差别,以欧拉角和图案中心的坐标为所寻求的参数,最小化所述目标函数以至收敛,得到校正后的图案中心和欧拉角。
优选地,所述参数的数量为六个:三个欧拉角和图案中心的三维坐标。
优选地,还包括:
低通滤波步骤:将整个衍射实验所扫描的所述实验衍射花样的多个图案中心集齐,将图案中心通过低通过滤器处理。
优选地,还包括:
重复配准步骤:固定低通滤波得到的校正后的图案中心,仅将欧拉角作为变量重新进行配准。
优选地,所述粒子衍射包括电子背散射衍射,透射电子衍射,X射线衍射或中子衍射。
优选地,所述电子衍射包括电子背散射衍射EBSD和透射电子衍射TKD;
所述实验衍射花样包括通过电子背散射衍射EBSD扫描采集的菊池图和透射电子衍射TKD扫描采集的菊池图,所述标准图案包括菊池标准图案。
优选地,所述配准步骤建立所述参数与实验衍射花样在标准图案上的投影坐标的数学关系,从而可用多种算法来最小化所述目标函数,包括牛顿算法。
优选地,所述配准步骤中,目标函数Θ为
式中,ROI为研究区域,ω(x)指实验衍射花样的像素x的权重,g
计算目标函数对各参数的偏导数:
式中,用P统一表示所述六个参数,即三个欧拉角和图案中心的三维坐标,u为经球面投影在赤道面上的坐标;
在计算趋于收敛时,有:
f(x)≈g
采用牛顿算法来优化这一目标函数,组建线性方程组,提供参数每次迭代的改变量{δP}:
[M]{δP}={γ}
黑森矩阵[M]在第n-1次迭代中元素M
其中的ψ是经球面投影在赤道面上的坐标u对各个参数的梯度矩阵:
牛顿算法第二项{γ}中各个元素的表达式为:
{δP}是每次迭代过程中六个参数的改变量,在低于设定值时,计算结束,找到最合适的欧拉角和图案中心数值,否则进行下一次迭代:
{P
根据本发明提供的一种校正粒子衍射图像图案中心和欧拉角的系统,包括:
图案获取模块:获取通过粒子衍射得到的晶体的实验衍射花样,以及获取所述晶体所对应的标准图案;
配准模块:将所述标准图案与所述实验衍射花样配准,配准过程中通过目标函数来表征所述标准图案与所述实验衍射花样的差别,以欧拉角和图案中心的坐标为所寻求的参数,最小化所述目标函数以至收敛,得到校正后的图案中心和欧拉角。
根据本发明提供的一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现上述的校正粒子衍射图像图案中心和欧拉角的方法的步骤。
与现有技术相比,本发明具有如下的有益效果:
1、本发明并未对样品倾斜角度做任何预设,所以对不同的倾斜角度容忍度很高。对于表面起伏较大的样品,也可始终给出精确的晶向。因此本方法适于原位实验中的EBSD标定。
2、本发明可根据实际情况方便的做出微调。例如对于表面起伏较为平缓的样品,可采取低通滤波器来过滤掉图案中心的高频分量,并专注于优化三个欧拉角,从而明显的提高计算精度。
3、本发明对不同晶向的菊池图分析精度相近,不存在标定误差特别大的情况,而常规EBSD软件Aztec计算出的标定误差在一些晶向中显著偏高。
4、本发明计算精度高,对于低分辨率实验衍射图案(120×160)欧拉角标定精度在0.1°,因而评估的GND密度分辨率更高,不存在整个晶粒内部一片均匀的情况,且更符合小塑性变形样品的常规分布。
5、本发明计算速度高。处理低像素实验衍射图案耗时在秒级,处理高分辨率实验衍射图案耗时也低于一分钟,效率显著高于现有的基于遗传算法、Nelder-Mead算法的校正方法。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
图1为图案中心与样品的几何关系示意图;
图2a为高清晰度(1024×1344)的菊池图样图;
图2b为低清晰度(120×160)的菊池图样图;
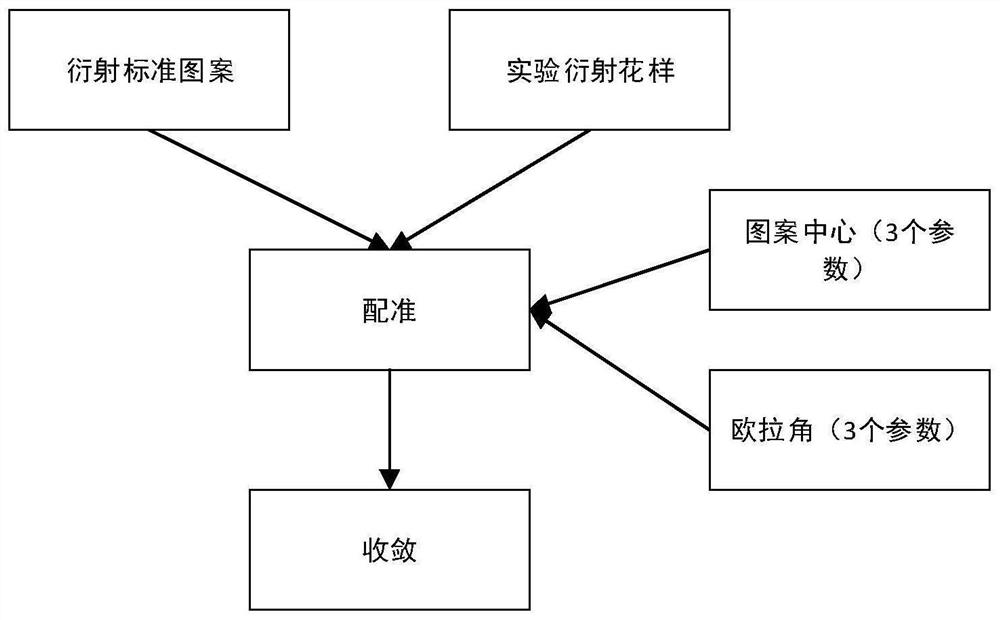
图3为本发明的工作流程图;
图4a为位于二维空间x的菊池图;
图4b为位于三维空间w的球形菊池标准图案;
图4c为位于三维空间v的未经旋转的菊池标准图案;
图4d为位于二维空间u的经球面投影的菊池标准图案;
图5为球面投影至u空间的菊池标准图案示意图;
图6a为图案中心的x轴坐标分布图;
图6b为图案中心的y轴坐标分布图;
图6c为图案中心的z轴坐标分布图;
图7a为倾角实验中EBSD扫描区域的反极图;
图7b为样品倾角65°和70°两次欧拉角的角度差示意图;
图7c为软件Channel 5给出的角度差示意图;
图8a为软件Aztec对单向拉伸5%变形后铝镁合金局部角度差计算结果示意图;
图8b为本发明对单向拉伸5%变形后铝镁合金局部角度差计算结果示意图;
图9a为软件Aztec从EBSD数据评估得出的GND密度示意图;
图9b为本发明从EBSD数据评估得出的GND密度示意图;
图10为亚晶界及其晶界角示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
实施例一
本实施例提供的一种校正粒子衍射图像图案中心和欧拉角的方法,粒子衍射包括电子衍射或X射线衍射等等,在本实施例中,优选粒子衍射中的电子背散射衍射实验(EBSD)为例进行说明,但本发明并不以此为限。
基于动力学模拟得到的衍射标准图案(master pattern,标准图案是通过基于布拉格方程的理论知识计算得到,属于现有技术),采用全局集成数字图像相干技术(Integrated Digital Image Correlation),来配准标准图案与实验测得的菊池图。配准过程中设立一个目标函数来表征两类图片的差距,以三个欧拉角
在本实施例中,采用EBSD采集菊池图进行标准图计算和配准进行说明,但是本发明并不以此为限,本发明还可以应用于Laue衍射、透射电子衍射、中子衍射等领域中。
如图3所示,本发明的技术方案如下:
收集整张EBSD实验采集的菊池图,记为f(x),图2a、图2b列出两幅不同分辨率的菊池图,图2a清晰度高(1024×1344),图2b清晰度低(120×160)。采用Emsoft等软件计算菊池标准图案,记为g(u),调整菊池标准图案的亮度,使得其平均值和方差与实验菊池图亮度的平均值和方差相同。在本发明中,将整张EBSD扫描所对应的图案中心集齐,并用低通过滤器处理一遍图案中心,过滤掉其中的高频分量,以减小校正误差,得到分布更均匀连续、更符合实际的图案中心。
设置欧拉角和图案中心的初始值。初始值可用Bruker Dynamics软件算得,或者用其他EBSD晶向软件(Oxford Instruments,Channel 5等)提供。需要注意的是,上述EBSD软件普遍给出的是晶体坐标系相对于样品坐标系的欧拉角,而样品通常倾斜70°,所以若采用EBSD软件提供初始值,需要首先将欧拉角沿着样品X轴反转70°。
电子束作用体积的坐标是x
上标T为实现行向量和列向量相互转化的转置操作。
因为各晶粒的取向各异,在计算模拟菊池图时需要将菊池图标准图案旋转至晶粒取向,所以单位向量w被转至新方向:
v=Qw
这里Q为3×3旋转矩阵,用欧拉角表述为:
菊池标准图案是球面投影的结果,球面投影公式如下:
式中的n指朝向北极点的单位向量(0,0,1)
至此本发明共使用了四个空间,即二维空间x,u和三维空间w,v。图4a、图4b、图4c和图4d展示了这四个空间,和一张实验菊池图在这四个空间中的位置。由上述公式可方便地在这四个空间内相互转化、换底。其中,图4a为实验菊池图,位于探测器二维空间x,图4b为球形菊池标准图案,位于三维空间w,与x呈投影关系,图4c为未经旋转的菊池标准图案,位于三维空间v,图4d为经球面投影的菊池标准图案,位于二维空间u。图4b、图4c和图4d三张图片中的框内部分对应图4a图中的菊池图。
投影及菊池标准图案插值过程的示意图见图5:
将菊池图与模拟投影图片的均方差列为目标函数θ:
式中的ROI指的是研究区域Region of Interest,在此处一般将菊池图的所有像素都列入;式中ω(x)指菊池图各个像素的权重,引入这一变量是因为菊池图不同位置处的噪声级别不同。实际操作中ω(x)应定为图片各像素噪声的标准差的倒数,这样构建的目标函数能得到最好的参数优化值。因此,可以调节六参数而使得目标函数最小化。鉴于目标函数由常规函数构成,具有平滑性,因此本发明采用基于梯度的牛顿算法来做优化,具体过程如下:
计算目标函数对各个参数的偏导数,
在计算趋于收敛时,有
f(x)≈g
鉴于优化项目中有6个参数,故需要组建线性方程组,来提供参数的改变量。
[M]{δP}={γ}
Hessian矩阵[M]大小为6×6,在第n-1次迭代中其各个元素的表达式为
其中的ψ是坐标u对各个参数的梯度矩阵:
牛顿算法中第二项{γ}的表达式为
{δP}是每次迭代过程中六个参数的改变量,在低于某设定值(例如10
{P
由此可见,牛顿算法中的每一项都有了关于所求6个参数的明确的数学表达式,因此牛顿算法可迅速的寻找最优解,该方法在速度上显著优于蚁群算法、遗传算法等演化算法。
本发明可根据实际做出相应的改动。例如对于表面起伏较为平缓的样品,可固定得到的均匀连续的图案中心,仅将三个欧拉角作为变量,重新配准实验菊池图和标准图案,从而得到更精确的欧拉角,测得晶体样品更精细的结构。
本发明还提供一种校正EBSD实验图案中心和欧拉角的系统,包括:
图案获取模块:收集整张EBSD扫描采集的菊池图,计算得到菊池图的菊池标准图案。在本发明中,EBSD扫描可在扫描电镜中方便的完成。
配准模块:将菊池标准图案与菊池图配准,配准过程中设立一个目标函数来表征菊池标准图案与菊池图的差距,以图案中心的坐标和三个欧拉角为所寻求的六个参数,采用牛顿算法来最小化所述目标函数,得到校正后的图案中心和欧拉角。
应用范例一
为测试本发明校正EBSD图片图案中心的精度,采用铝镁合金样品,摄取了一系列高分辨率(1200×1600)的菊池图。通过本发明处理这批菊池图,经过20次左右的迭代即可收敛,得到的图案中心如图6a、图6b和图6c所示。可见图案中心的三个坐标均表现出明显的线性特征,其中x
为测试本发明对样品倾斜角度的敏感性,发明人对铝镁多晶样品的同一区域(见图7a)做了两次EBSD扫描,样品分别倾斜65°和70°。两次扫描标定出的欧拉角,理论上应该恰好有5°的偏差。本发明和常规EBSD软件(Channel 5)给出的角度差图7b和图7c所示,可见本发明计算出的角度差更接近5°,距5°的平均偏差为0.045°。而常规软件给出的角度差离5°较远,这是因为常规软件默认样品倾斜70°,在标定衍射晶面的时候与数据库中的倾斜70°的图案做对比,导致在处理其他倾斜角度的图片时精确度降低。而本发明提出的欧拉角标定方法,并未对样品倾斜角度做任何预设,所以对不同的倾斜角度容忍度很高。这一测试表明,本发明非常适用于表面起伏较大的样品,可始终给出精确的晶向。因此本方法适于原位实验中的EBSD标定。图7a为扫描区域的反极图,共有5个晶粒被扫描。图7b为本发明给出的样品倾角65°和70°两次欧拉角的角度差。图7c为常规软件Channel 5给出的角度差。
应用范例二
本发明用于处理铝镁合金原位(in-situ)单向拉伸的EBSD数据,菊池图分辨率为120×160,这是典型的快速EBSD扫描的图片质量。样品为完全退火铝镁合金,且经受了较低的5%拉伸变形,理论上局部角度差(Kernel average misorientation)应该较低较均匀,应变集中只会发生在有限的区域。图8a、图8b展示了样品的局部角度差,单位为°,分别源于用常规软件(Aztec)和本发明来处理同一批EBSD菊池图。图8b中本发明选取了全部6个自由度,可见本发明给出的不同晶向的局部角度差更加的均匀,而常规EBSD软件Aztec计算出的局部角度差在一些晶粒中显著偏高。
本发明可做二次计算,即固定平滑处理后的图案中心,仅优化欧拉角。二次计算可显著降低欧拉角偏差,本案例从0.32°降为0.11°。本发明标定的欧拉角以其高精确度,可以揭示样品中更精细的结构,例如不完全再结晶留下的亚晶界和几何必需位错(GND)密度。图9a、图9b为从EBSD数据评估得出的GND密度,单位为m
二次计算后,本发明可揭示局部更精细的微观结构,例如图10所示的明显的亚晶界。0.3-0.5°范围内的晶界角都清晰可见,显示了本发明在揭示样品精细结构方面的强大能力。
表1总结了本发明应用在实验菊池图上的性能。计算结果表明,在处理低清晰度(120×160像素)的菊池图时,欧拉角精确度在0.08°,图案中心精确度在0.47像素,而在处理高清晰度(1200×1600像素)的菊池图时,本发明可标定得到精确度为0.03°的欧拉角。
表1、本发明用于铝镁合金样品菊池图处理的计算结果
本发明提供的一种校正粒子衍射图像图案中心和欧拉角的系统,包括:
图案获取模块:获取粒子衍射得到的晶体的实验衍射花样,以及通过计算模拟获取所述晶体所对应的标准图案。
配准模块:将所述标准图案与所述实验衍射花样配准,配准过程中通过目标函数来表征所述标准图案与所述实验衍射花样的差别,以欧拉角和图案中心的坐标为所寻求的参数,最小化所述目标函数以至收敛,得到校正后的图案中心和欧拉角。
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 校正粒子衍射图像图案中心和欧拉角的方法、系统及介质
- 校正粒子衍射图像图案中心和欧拉角的方法、系统及介质