基于区域约束的低虚警目标检测方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于雷达图像处理技术领域,具体涉及一种基于区域约束的低虚警目标检测方法。
背景技术
FOD(Foreign Object Debris,机场跑道异物)监测雷达(以下简称FOD雷达)主要装备于民航机场,用于主动探测机场跑道上不应存在的并且可能会对飞机起降造成损伤的物体,包括金属部件(飞机或执勤车辆遗落的螺母、螺栓等)、碎石块等。相比于传统人工定期排查方法,FOD雷达具有以下优点:观测范围广、全天时全天候工作、实时性好等。由于FOD尺寸较小,为了满足高分辨率的检测要求,FOD雷达一般采用毫米波LFMCW(LinearFrequency Modulated Continuous Wave,线性调频连续波)体制,如英国奎奈蒂克(QinetiQ)公司的眼镜猴(Tarsier)系列、美国特雷克斯企业(TrexEnterprises)的FODetect系统等。
FOD雷达属于对地探测静止微小目标雷达,需要从强地物杂波背景下高可靠性地检测出潜在对飞机起飞或降落造成威胁的弱静止目标,包括飞机或车辆遗落的金属零件、碎石块、塑料制品等,并抑制虚假目标的告警。但由于机场跑道及其附近区域地物散射特性较为复杂,直接对雷达回波全量程图像进行检测会引起很多虚警,这时需要通过光学探头或人工进行逐个排查,造成时间和资源的浪费。因此,如何降低FOD雷达的虚警概率是目前研究的热点。CFAR(Constant False Alarm Rate,恒虚警)检测技术是目前解决此类问题最常见的办法,例如时域CFAR、空域CFAR以及杂波图CFAR等。
《无线电工程》期刊杂志刊载了一篇名为“CFAR方法在机场跑道FOD检测中的性能分析”的文章,公开分析了单元平均CFAR(CA-CFAR)和排序CFAR(OS-CFAR)在FOD雷达中的检测性能。此类方法在杂波分布特性比较均匀的条件下可以在比较低的虚警率下获得表现不错的检测性能,但是当背景杂波比较复杂时,此类方法的检测性能下降,虚警偏高。
《IEEE Transactions on Aerospace and Electronic Systems》外文杂志刊载了一篇名为“Clutter map CFAR analysis”的文章,公开了一种基于杂波图的CA-CFAR方法,其思想是通过多次扫描来估计杂波平均功率,减少因背景杂波随距离单元变化引起的虚警,不足之处是当干扰存在时会导致该方法出现目标漏检,影响检测性能。
由于FOD雷达架高有限(一般在3米以内),天线波束基本上呈水平小角度偏下的方式扫描,而地物散射特性比较复杂,采用上述方法将导致系统虚警率偏高,这将增加光学辨别或人工排查的难度,造成时间和资源的浪费。
综上所述,如何解决因复杂地物散射特性造成FOD雷达检测虚警率偏高的问题是该研究领域的热点问题,亦是FOD雷达低虚警微小静止目标检测系统的关键技术之一。
发明内容
本发明目的是提供一种基于区域约束的低虚警目标检测方法,能够保证感兴趣区域内目标准确检出,且降低虚警目标产生的可能;大大减轻光学探头或人工逐个排查的压力,提高整个机场监控系统的时间和资源利用率。
具体地说,本发明提供了一种基于区域约束的低虚警目标检测方法,包括:
图像约束区域标定的步骤:将FOD雷达扫描范围中感兴趣区域标定出来,作为预设的目标位置属性范围;
雷达图像二值化处理的步骤:将雷达图像转换成二值图像;
连通域标记的步骤:从所述二值图像中将邻接的“1”集合提取出来,并为其标记相应的数字序号,将该数字序号作为相应连通域集合内所有元素的新像素值;
连通域检测的步骤:遍历所有已标记连通域的面积属性、长宽属性、位置属性,将满足预设的目标面积属性、长宽属性、位置属性范围的连通域形成连通域集,作为目标检测结果。
进一步的,所述雷达图像二值化处理的步骤之前还进行雷达图像预处理,所述雷达预处理的步骤包括:
对雷达的大时宽带宽线性调频连续波信号进行解线调频脉压处理,形成脉压数据;
将脉压数据的数据帧按对应的方位角进行排列,并拼接成雷达图像;
采用帧间非相参处理方法对雷达图像进行窗长的滑窗平均处理;
去除雷达图像的距离衰减,按距离统计方位向能量统计值作为基底噪声的估计值,并用该估计值去抵消雷达图像中方位向能量分布;
去除雷达图像的方向衰减,按方位分段统计距离向能量统计值作为基底噪声的估计值,并用该估计值去抵消雷达图像中距离向能量分布。
进一步的,所述图像约束区域标定的方法为实测法或曲线拟合法;
所述实测法为根据实际测得的雷达和机场跑道的位置关系计算出每个扫描角度的回波数据中对应机场跑道区域的最近和最远距离,并将位于最近距离和最远距离之间的数据提取出来,作为机场跑道感兴趣区域内的数据;
所述曲线拟合法为根据雷达图像中机场跑道回波强度的差异找出其区域边界的若干特征点,并对这些特征点进行曲线拟合,将曲线拟合结果作为感兴趣区域的边界,获得机场跑道感兴趣区域内的数据。
进一步的,所述曲线拟合法包括:
对所述约束区域边界的特征点集进行分类,得到约束区域的上下左右四类特征点,并分别对四类特征点进行曲线拟合。
进一步的,所述将雷达图像转换成二值图像的方法为传统2D-CFAR、局部2D-CFAR或OTSU。
进一步的,所述连通域标记的步骤中选用四连通方式或八连通方式对二值化雷达图像标记连通域。
进一步的,所述连通域的面积属性为对连通域内二值图像所含元素对应尺度面积的总和;
所述连通域的长宽属性为连通域的外切矩形的长边和短边;
所述连通域的位置属性满足预设的位置属性范围,是指连通域的中心位置位于所述图像约束区域标定的步骤所选定的FOD雷达扫描范围中感兴趣区域内。
进一步的,对于尺度均匀且归一化的二值图像,所述连通域的面积属性为对连通域内二值图像所含元素个数总和。
进一步的,所述目标面积属性范围为大于5且小于800,单位为像素单元。
进一步的,所述目标长宽属性范围为大于1且小于100,单位为像素单元。
本发明的基于区域约束的低虚警目标检测方法的有益效果如下:
本发明的基于区域约束的低虚警目标检测方法,从FOD雷达的设计初衷出发,即监视机场跑道区域内是否存在异物并提取其位置信息和结构信息,换言之,FOD雷达只对跑道区域内的异物感兴趣,通过选定FOD雷达扫描区域中的感兴趣区域,并利用该信息作为FOD是否有效的判断条件,从而有效地过滤掉那些落入感兴趣区域外的虚假目标,减轻光学探头或人工逐个排查的压力,提高整个机场监控系统的时间和资源利用率。本发明的基于区域约束的低虚警目标检测技术是有效的,能够在保证感兴趣区域内目标准确检出的同时降低虚警目标产生的可能。通过本发明可以大大减轻光学探头或人工逐个排查的压力,提高整个机场监控系统的时间和资源利用率。
附图说明
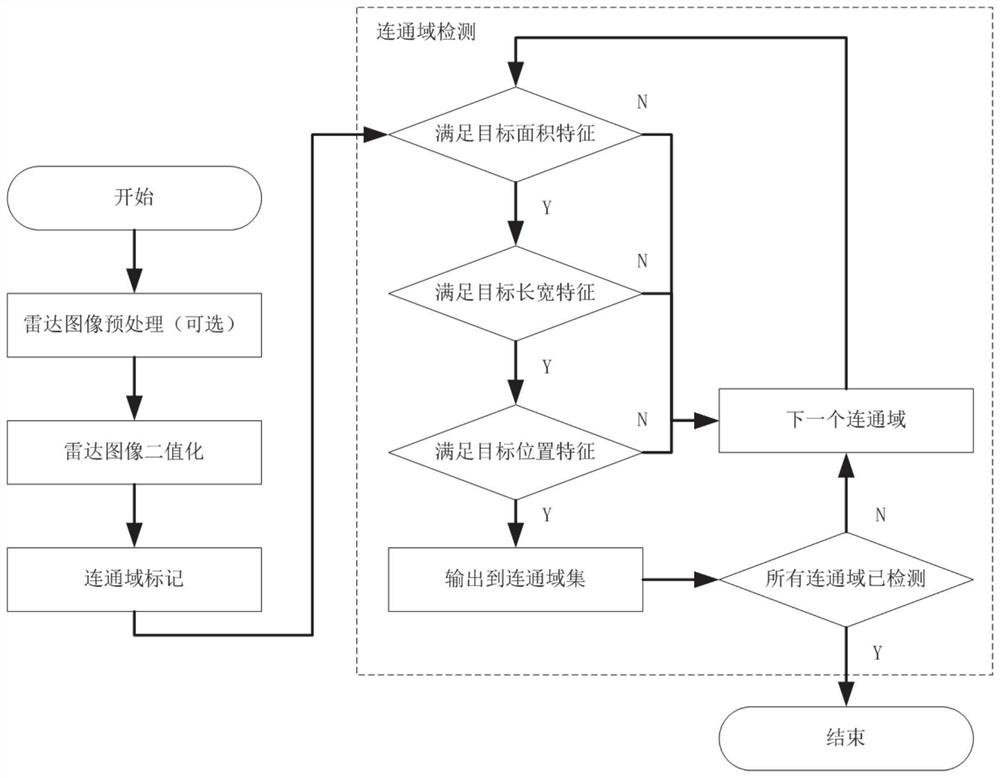
图1是本发明实施例的流程图。
图2是本发明实施例的机场跑道感兴趣区域标定示意图。
图3是本发明实施例的雷达图像约束区域选取流程图。
图4是本发明实施例的原始雷达图像示意图。
图5是本发明实施例的雷达图像约束区域标定结果示意图。
图6是本发明实施例的雷达图像预处理结果示意图。
图7是本发明实施例直接对图4的原始雷达图像进行连通域面积和长宽置检测的结果示意图。
图8是本发明实施例利用图5的雷达图像约束标定结果对图7的雷达图像检测结果进行位置属性判断后的结果示意图。
图9是本发明实施例图8的检测结果区域一局部放大示意图。
图10是本发明实施例图8的检测结果区域二局部放大示意图。
图11是本发明实施例图8的检测结果区域三局部放大示意图。
具体实施方式
下面结合实施例并参照附图对本发明作进一步详细描述。
实施例1:
本发明的一个实施例,为一种基于区域约束的低虚警目标检测方法,流程如图1所示,包括以下步骤。
一、雷达图像预处理(可选)
优选的,可以对如图4所示的原始雷达图像进行去距离衰减和图像量化处理等预处理。申请号为202010378013.8的中国专利申请,公开了一种基于雷达图像统计特征的背景抑制方法,包括:
对雷达的大时宽带宽线性调频连续波信号进行解线调频脉压处理,形成脉压数据;
将脉压数据的数据帧按对应的方位角进行排列,并拼接成雷达图像;
采用帧间非相参处理方法对雷达图像进行窗长的滑窗平均处理;
去除雷达图像的距离衰减,按距离统计方位向能量统计值作为基底噪声的估计值,并将该估计值从雷达图像中对消;
去除雷达图像的方向衰减,按方位分段统计距离向能量统计值作为基底噪声的估计值,并将该估计值从雷达图像中对消。
通过该基于雷达图像统计特征的背景抑制方法,能实现有效地补偿FOD雷达图像因信号传播衰减引起的远近回波能量差异以及抑制距离向的扩展性干扰信号,将原本具有复杂分布特性的FOD雷达图像变换为背景起伏比较均匀的一般灰度图像。
本发明中,对原始雷达图像进行去距离衰减和图像量化处理等预处理的具体处理流程及参数设置参见该专利申请的技术方案。通过雷达图像预处理,可以使得预处理后的雷达图像更有利于潜在目标的检测。如图4所示的原始雷达图像经雷达图像预处理后的结果如图6所示。
二、图像约束区域标定
图像约束区域标定是将机场跑道上FOD监测雷达对机场跑道进行扫描时,将扫描范围中感兴趣区域标定出来,作为是否输出目标的位置约束条件。可以理解,图像约束区域标定在连通域检测之前完成即可。如图2所示,深灰色实线矩阵长条表示机场跑道,长度一般在3至5公里范围,毫米波FOD监测雷达放置于跑道一侧对其进行扫描观测,最大探测距离一般在1公里左右,也即是说,一条机场跑道通常需要3至5台毫米波FOD监测雷达组网才能完全覆盖,虚线椭圆表示FOD监测雷达扫描范围中机场跑道感兴趣区域。
在FOD雷达扫描范围中标出机场跑道感兴趣区域有两种常用的方法:实测法和曲线拟合法。实测法指的是根据实际测得的雷达和机场跑道的位置关系计算出每个扫描角度的回波数据中对应机场跑道区域的最近和最远距离,并将其间的这段数据提取出来作为机场跑道感兴趣区域内的有效数据。曲线拟合法指的是根据雷达图像中机场跑道回波强度的差异找出其区域边界的若干特征点,并对这些特征点进行曲线拟合得到完整的机场跑道感兴趣区域。实测法通过实测的方法获得机场跑道在雷达扫描范围中的区域,只要测量仪器精度足够基本可以保证选取区域的准确性,但这样需要消耗大量的人力物力;与实测法不同,曲线拟合法是通过处理雷达图像获得的机场跑道区域,具有实现方便、处理灵活的特点,缺点是准确性欠佳。优选的,本发明采用曲线拟合法标定机场跑道感兴趣区域。
一种实施例中,基于曲线拟合法选取图像约束区域的方法流程如图3所示,具有原理简单,计算量小,易于实现的特点,能够拟合出符合实际感兴趣区域的边界位置,具体来说,包含以下步骤:
第一,根据雷达图像回波特点和实际天线扫描场景的先验知识,从原始雷达回波图像(如图4所示)中挑选约束区域边界的特征点集。
第二,对已挑选出的特征点集进行分类,得到约束区域的上下左右四类特征点,并分别对四类特征点进行曲线拟合,感兴趣区域曲线拟合的结果(即雷达图像约束区域标定结果)如图5所示。
第三,将拟合曲线结果作为感兴趣区域的边界,并以此作为是否输出目标的位置约束条件。
三、雷达图像二值化处理
可以采用常用的二值化算法,例如传统2D-CFAR(2 Dimension-Constant False-Alarm Rate,二维恒虚警率)、局部2D-CFAR、OTSU(最大类间方差法)等对原始雷达图像或者经雷达图像预处理之后的雷达图像进行二值化处理,将雷达图像转换成二值图像(0和1)。优选的,本发明采用OTSU法进行雷达图像二值化处理,相比于CFAR类方法,OTSU具有处理速度快,二值化效果好等优点。
四、二值化图像连通域标记
连通域标记是指从二值图像(0和1)中将邻接的“1”集合提取出来,并为其标记相应的数字序号,将该数字序号作为相应连通域集合内所有元素的新像素值。在图像处理领域,该操作是最为基本的,也是非常关键的一步,对图像处理的最终结果具有重要影响。
连通域标记的结果与所选用的连通方式有关。常见的连通方式有两种:四连通和八连通。其中,四连通只在对应像素位置的上下左右查找与之具有相同属性的位置,而八连通在四连通的基础上还会查找对应像素位置的右下、右上、左下、左上四个点,即四连通的区域必定也是八连通区域,八连通方式相比四连通方式合并的区域更大,可以减少孤岛状连通域的数量,从而更好地减少因孤岛状连通域造成的目标检测虚警。本发明连通域标记采用八连通方式对二值化雷达图像标记连通域。
五、连通域检测
对于FOD目标检测过程中,雷达图像中目标形状一般是固定的,而在雷达图像中非目标与目标相比,面积差不多,但是形状差异大。因此,通过将雷达图像中标记的连通域与预设的目标面积、尺寸进行比较,可以筛选出目标。FOD雷达只对跑道区域内的异物感兴趣,通过判断标记的连通域是否在选定的FOD雷达扫描区域中的感兴趣区域内,可以有效地过滤掉那些落入感兴趣区域外的虚假目标。
遍历所有已标记连通域的面积属性、长宽属性、位置属性,形成连通域集。连通域面积是指在完成二值图像连通域标记后,连通域内所含元素对应尺度面积的总和,对于尺度均匀且归一化的二值图像,连通域面积等于所含元素个数总和。连通域长宽分别是指连通域的外切矩形的长边和短边。
1,面积属性判断(总像素点数)
遍历所有已标记连通域的面积属性,判断其值是否满足预设的目标面积属性范围要求。若满足,进而判断该连通域的长宽属性;否则,跳过该连通域,对下一个连通域进行面积属性判断。
由于FOD一般比较小,优选地,本发明目标面积属性范围设为大于5且小于800,单位为像素单元,例如像素点个数。这一取值范围既能降低因目标面积属性范围过小,从而小面积随机噪声落在目标面积属性范围内引起的虚警;又可以避免因目标面积属性范围过大,从而大面积的非FOD落在目标面积属性范围内而将大块面积的非FOD判断为FOD。
2,长宽属性判断
遍历所有已满足目标面积属性的连通域,判断其长宽属性是否满足预设的目标长宽属性范围的要求,可以过滤掉雷达图像中面积与目标相近的非目标。若连通域的长宽属性满足预设的目标长宽属性范围的要求,进而判断该连通域的位置属性;否则,跳过该连通域,对下一个连通域进行连通域检测,即进行面积属性判断。
由于FOD一般比较小,优选地,本发明的目标长宽属性范围设为大于1且小于100,单位为像素单元,例如像素点个数。这一取值范围对长宽属性小于100个像素单元的FOD检测有效,对于轮廓比较大的目标则需要适当放宽取值范围。
对如图4所示的原始雷达图像已标记的连通域进行面积属性和长宽属性进行检测后,满足目标面积属性和长宽属性检测的雷达图像如图7所示。
3,位置属性判断
遍历所有已满足目标面积、长宽属性的连通域,判断其中心位置是否位于图像约束区域标定所选定的约束区域内,即对雷达图像连通域面积和位置检测结果进行区域约束。若满足则将该连通域的参数作为检出目标参数,输出到连通域集;否则,跳过该连通域,对下一个连通域进行连通域检测,即进行面积属性判断。
重复对已标记的连通域进行连通域检测,直至所有已标记的连通域都完成连通域检测。
利用图5的雷达图像约束标定结果,对图7的雷达图像检测结果进行区域约束后的结果如图8所示。
本发明的基于区域约束的低虚警目标检测方法,从FOD雷达的设计初衷出发,即监视机场跑道区域内是否存在异物并提取其位置信息和结构信息,换言之,FOD雷达只对跑道区域内的异物感兴趣,通过选定FOD雷达扫描区域中的感兴趣区域,并利用该信息作为FOD是否有效的判断条件,从而有效地过滤掉那些落入感兴趣区域外的虚假目标,减轻光学探头或人工逐个排查的压力,提高整个机场监控系统的时间和资源利用率。
为了定量的说明本发明方法获得的有益效果,定义检测成功率p
式中,N
图9、图10以及图11为分别对图6中三处包含检测目标的局部检测结果区域进行放大后的结果,共计9个目标,即N
对于图7的检测结果,经统计可知,N
对于图8的检测结果,经统计可知,N
对比图8和图7的检测结果,不难发现,本发明的基于区域约束的低虚警目标检测技术是有效的,能够在保证感兴趣区域内目标准确检出的同时降低虚警目标产生的可能。通过本发明可以大大减轻光学探头或人工逐个排查的压力,提高整个机场监控系统的时间和资源利用率。
虽然本发明已以较佳实施例公开如上,但实施例并不是用来限定本发明的。在不脱离本发明之精神和范围内,所做的任何等效变化或润饰,同样属于本发明之保护范围。因此本发明的保护范围应当以本申请的权利要求所界定的内容为标准。
- 基于区域约束的低虚警目标检测方法
- 一种基于边境环境自适应的低小慢目标恒虚警检测方法