一种飞机供电系统智能化集成设计系统及方法
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于飞机供电系统智能化集成设计领域,具体涉及一种飞机供电系统智能化集成 设计方法。
背景技术
飞机供电系统智能化集成设计是一个复杂而庞大的工程设计问题,具有多层次、高耦合 强度、高维设计空间,高维多目标、多约束等特点。在目前的飞机供电系统设计过程中,在 获得飞机分解的性能指标后,设计人员使用不同的方法和工具对各个系统开展独立设计,系 统设计所需的假设条件和设计点通常来自于前期产品的经验;在集成过程中,来自不同供应 商的设备和系统之间通过人工和文档的形式实现信息的交互。这样的设计方式具有以下缺陷: ①设计人员根据经验,通过解耦和分解获得不同设备和系统的设计要求,往往具有片面性, 难以保证设计的覆盖率,也不适合用于新技术的应用;②根据逆向工程依次从负载、配电到 发电系统进行串行设计,一方面可能会带来大量人工迭代,提高了设计的难度和复杂度;③ 另一方面,无法最大化利用系统性能,还可能导致系统设计的保守性;④基于文档的设计受 到文件语言描述的歧义性、文件传递的静态非结构性等限制;⑤此外,随着电气化技术的发 展,飞机中原本独立分散、互不影响的气压、液压系统替换为电能系统,大大提高了飞机能 源系统的集成化程度,这种参数之间的复杂耦合关系也给系统的集成设计带来了困难。因此, 现行的系统设计方法已无法满足未来的发展需求。
发明内容
本发明针对现有技术问题,提出一种飞机供电系统智能化集成设计方法,可以高效、低 成本地完成飞机供电系统集成设计,获得综合性能最佳的飞机供电系统方案,具有重要的理 论和工程应用价值。
本发明具体采用如下技术方案:
本发明首先提供一种飞机供电系统智能化集成设计方法,其特征在于包括以下步骤:
步骤一:针对飞机供电系统不同部件内部参数的多物理耦合关系建立飞机供电系统各部 件的多学科模型,并设定各部件多学科模型的参数;
步骤二:对各部件多学科模型进行试验设计,提取表征部件多学科模型设计空间特征的 输入、输出参数样本,使用数据挖掘方法提取部件多学科模型的关键特征参数,利用机器学 习算法建立满足系统集成设计需求的各部件近似模型;
步骤三:根据已知的设计条件建立飞机供电系统网络拓扑模型,并根据各部件的近似模 型建立系统网络拓扑设计目标和约束条件,使用多目标优化算法求解获得满足设计要求的最 优网络拓扑方案;
步骤四:根据步骤三获得的系统最优网络拓扑方案生成系统可能存在的工作状态集合, 在此基础上建立每个工作状态下系统能量调度模型,借助优化算法对系统进行能量优化调度 的计算求解,而后对不同工作状态下系统能量调度方案进行综合,获得对应网络拓扑满足不 同工作状态工作需求的容量配置方案,并建立以部件容量、节点电压为输入的容量配置模型, 借助多目标优化算法对网络拓扑、部件容量、节点电压进行优化,获得性能最佳的系统容量 配置方案。
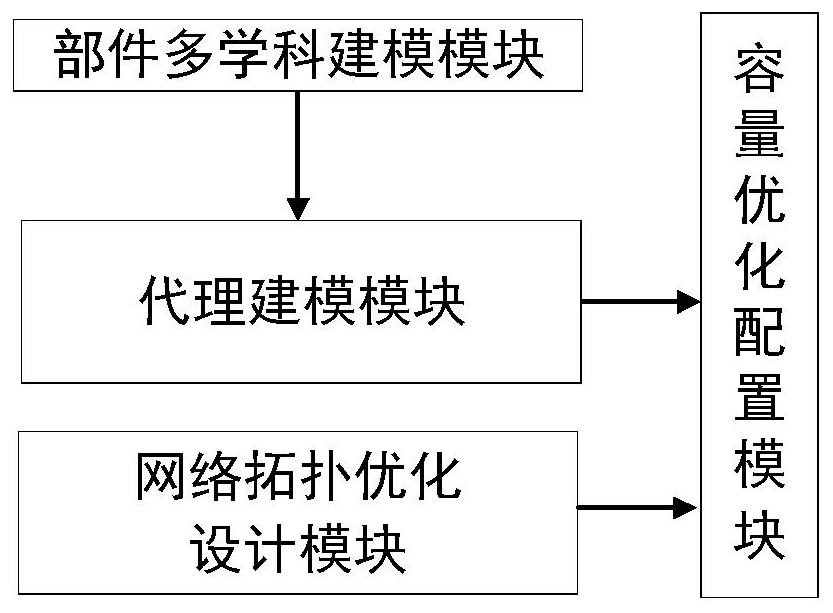
本发明的另一目的是提供一种飞机供电系统智能化集成设计系统,其特征在于包括:
多学科建模模块,针对飞机供电系统不同部件内部参数的多物理耦合关系建立飞机供电 系统各部件的多学科模型,并设定各部件多学科模型的参数;
代理建模模块,对各部件的多学科模型进行试验设计,提取表征部件多学科模型设计空 间特征的输入、输出参数样本,使用数据挖掘方法提取部件多学科模型的关键特征参数,利 用机器学习算法建立满足系统集成设计需求的各部件近似模型;
网络拓扑优化设计模块,根据已知的设计条件建立飞机供电系统网络拓扑模型,并根据 各部件的近似模型建立系统网络拓扑设计目标和约束条件,使用多目标优化算法求解获得满 足设计要求的最优网络拓扑方案;
容量优化配置模块,根据系统最优网络拓扑方案生成系统可能存在的工作状态集合,在 此基础上建立每个工作状态下系统能量调度模型,借助多目标优化算法对系统进行能量优化 调度的计算求解,对不同工作状态下系统能量调度方案进行综合,获得对应网络拓扑满足大 部分工作状态工作需求的容量配置方案并建立以部件容量、节点电压为输入的容量配置模型, 借助多目标优化算法对网络拓扑、部件容量、节点电压进行优化,获得性能最佳的系统容量 配置方案。
其中,飞机供电系统部件包括发电机、燃料电池、锂电池、超级电容、电感、电容、固态开关、变压器和线缆等。
多物理耦合具体包括电、气、液、机械、材料、结构、热等物理领域之间参数的耦合,多学科模型具体是指以多物理耦合参数为输入,以重量、体积、损耗、成本、可靠性、维修 性等一系列性能参数为输出的模型。
本发明技术效果如下:
1、本发明功能全面、操作简单。在多学科建模模块中建立不同部件模型;在代理建模模 块中设定设计参数变化区间,可以获得多学科模型的数据样本,可以分析设计参数在其变化 区间内对设计目标的影响程度,提取多学科模型的关键参数,使用机器学习算法建立多学科 模型的近似模型,满足系统集成设计精度和速度的需要;为了满足不同飞机的设计需求,在 网络拓扑优化设计模块中输入系统已知的电源、汇流条和负载信息,添加和删除供电系统网 络拓扑应满足的约束条件,并自动生成网络拓扑可行解;在容量优化配置模块中输入系统功 率需求,自动完成工作状态的生成、缩减和综合,自动对每个工作状态进行能量优化规划, 并根据对工作状态进行能量优化规划的结果,优化配置系统各部件容量,自动生成供电系统 可靠性最高、重量最轻、损耗最小的方案。
2、本发明高效率、低成本地完成从部件层面到系统层面供电系统智能化设计,在实现程 序中可以清晰展现部件和系统模型、优化设计的输入参数、优化过程的进度、优化设计的结 果。
附图说明
图1为一种飞机供电系统智能化集成设计方法;
图2为部件多学科模型框架示意图;
图3为代理建模模块框架示意图;
图4为网络拓扑优化设计模块框架示意图;
图5为供电系统容量优化配置模块示意图;
图6为飞机供电系统智能化集成设计的信号流程和关系图;
图7为同步发电机简化剖面;
图8为最优拉丁超立方试验设计方法;
图9为电机多学科模型试验设计结果;
图10为多学科模型特征参数提取方法;
图11为封装法原理;
图12为k折交叉验证原理;
图13为电机重量的近似模型精度;
图14为电机损耗的近似模型精度;
图15为网络拓扑优化设计帕累托图;
图16为网络拓扑优化设计方案之一;
图17为容量优化配置案例。
具体实施方式
一种飞机供电系统智能化集成设计系统,整体框架如图1-5所示,包括多学科建模模块、 代理建模模块、网络拓扑优化设计模块、容量优化配置模块,模块具体的功能和关系如图6 所示。
下面以某型飞机供电系统设计为例对本发明设计方法进行详细描述,具体步骤如下:
A:针对飞机供电系统不同部件内部参数的多物理耦合关系建立供电系统发电机、燃料电 池、蓄电池、变换器、开关、电缆等各多学科模型。多学科建模模块利用各部件多物理耦合 原理建立各部件的多学科模型,多物理耦合指多种物理领域之间参数的耦合,多学科模型具 体是指以多物理耦合参数为输入,以性能参数为输出的模型。以同步发电机为例:
在工程经验对电磁负荷、尺寸比等参数的取值范围内,对电机各部分尺寸进行计算。
计算功率P由额定功率P
式中η
K
轴的工作能力一般取决于强度和刚度,转速高时还取决于震动稳定性。假设轴为圆柱体, 则其关键设计参数为其轴向和径向长度。
电机轴传递扭矩的强度条件为
即
式中[τ]为许用扭转剪切应力,MPa;T为轴传递的扭矩,Nmm;W为轴的抗扭截面系数, 0.2d
根据轴的刚度计算,
式中系数B值查表获得。
在轴的结构初步设计完成后,通常要对其进行弯扭合成强度校核。
根据第三强度理论,钢的强度条件为
可以得到
式中σ
电机主要尺寸是指其电枢直径和有效长度,可以根据电磁负荷和尺寸比初步计算得到。
线负荷A是指电枢圆周单位长度电流导体数,即
式中N
电机常数CA指,单位转矩所耗用的有效材料的体积,反映材料的消耗量,即
式中n为电机转速,α′为极弧系数,k
电机尺寸比λ定义为电机定子或电枢的有效长度与极距之比。
定子外径D
D
式中K为比值经验系数,2极电机取0.35~0.4,4极电机取0.52~0.57,6极电机取0.6~0.72。
以图7为例说明磁路计算过程。
气隙磁感应强度为
齿距离齿根1/3齿高处的齿宽b
式中b
齿的磁密(距离齿根1/3齿高处的磁感应强度)为
查硅钢片磁化特性曲线可获得对应的磁场强度H
转子齿部磁势为
F
转子轭磁感应强度为
查硅钢片磁化特性曲线可获得对应的磁场强度H
转子轭磁势为
F
式中ξ为轭部磁路长度因数,可查表确定。
电极磁通为
Φ
式中k
电极磁感应强度为
式中b
查硅钢片磁化特性曲线可获得对应的磁场强度H
主极磁势为
F
定子轭磁感应强度为
查硅钢片磁化特性曲线可获得对应的磁场强度H
定子轭磁势为
F
最终得到
F=F
气隙系数k
式中b
若定、转子均开槽,则
k
极弧系数决定于励磁磁势分布曲线的形状、气隙的均匀程度和磁路饱和程度。若励磁磁 势正弦分布、气隙均匀、磁路不饱和,则α′=2/π=0.637;磁路越饱和,α′越大。
绕组的设计参数包括单匝导体长度以及绕组串并联数和导线串并绕数。其中,单匝导体 长度在电机尺寸确定的情况下基本确定,因此需要求解单相绕组串并联数N
电枢绕组设计和校核步骤如下:①根据输出电压,计算获得单相绕组串数和单匝绕组串 并绕数的乘积N
绕组等效直流电阻为
式中ρ
ρ
由于集肤效应,绕组通以交流电时电阻值将增大,用系数K
R
每相绕组的主电抗可表示为
式中λ
漏抗则为
式中槽比漏磁导λ
式中h为绕组的径向长度,h
谐波比漏磁导λ
齿顶比漏磁导λ
式中λ
电机端部比漏磁导λ
励磁绕组的设计包括确定励磁绕组匝数、线规及励磁系统对额定励磁电流和电压的要求。
电枢漏抗和电阻的标幺值为
额定负载时,电动势的标幺值为
每极电枢反应磁动势为
直轴、交轴电枢反应磁动势为
式中K
式中A
式中A
额定负载时,各部分磁密变为原来的E
F
然后获得额定负载时励磁磁动势为
根据全电流定律,
N
式中N
励磁绕组总长度为
l
设励磁绕组径向方向有N
电机的设计目标可以是重量、损耗及其他电气性能。耦合约束层可以描述电机的大多电 气性能,而在确定材料和尺寸的前提下电机重量可以由材料密度计算得到,在此不做赘述, 而主要对损耗进行建模。
电机的损耗包括机械损耗、铜损、铁损和杂散损耗四个方面:机械损耗包括电刷及轴承 摩擦损耗、通风损耗等;铜损为绕组的损耗;铁损为定子和转子铁芯的损耗。
根据能量转换平衡方法,轴承摩擦损耗P
P
式中F为轴承受力矩,Nm;N
轴承承受力矩F包括转子重量G和单边磁拉力P
F
F
转子重量G
F
式中L为两轴承间的距离(或转子铁心长度),m;L
单边磁拉力P
P
式中D为转子外径,cm;L,cm;δ为气隙长度,cm;e为定转子偏心值,cm;B
空气摩擦损耗主要分为圆柱形的转子表面和轴向磁力轴承转子的盘状结构两侧空气摩擦 损耗两部分。
圆柱形转子的表面空气摩擦损耗可以表示为
P
式中A
圆盘的表面空气摩擦损耗可以表示为
P
总摩擦损耗为
P
式中摩擦系数k
气压和温度对空气密度ρ
式中p为大气压(mmHg),T为风温。
摩擦系数在很大范围内时雷诺数Re的函数,圆柱体在流体中旋转的Re为
式中r为圆柱体半径,m;ω为圆柱体旋转角速度,rad/s;ν为流体的运动粘度,m
根据Re的大小,可以求得摩擦系数k为
开路或者空载铁心损耗包活磁滞和涡流损耗,是仅在主励磁绕组激励的情况下,由电机 铁心中时变磁通密度所引起的损耗。
正常运行条件下,单位重量的钢片的涡流损耗p
式中ρ为钢片电阻率,ρ
在厚度一定的情况下,有
基于经验公式,单位重量的铁磁物质的磁滞损耗p
式中K
单位重量的钢的铁损p
对于不同含硅量的硅钢片,可以通过查表获得K
为了计算方便,如果一般情况下,不同的f和不同的B
式中p
钢的基本铁耗应为
P
式中k
根据上述数学表达式,电机多学科模型的输入、输出接口参数如表1所示。
B:对不同部件多学科模型进行试验设计,提取表征多学科模型设计空间特征的输入、 输出参数样本,而后使用数据挖掘方法提取多学科模型的关键特征参数,利用机器学习算法 建立满足系统集成设计需求的近似模型。以电机多学科模型为例:
确定电机的设计空间如表1所示,采用基于最优拉丁超立方的试验设计技术生成电机多 学科模型的数据样本,步骤如图8所示,其结果如图9所示。
表1电机多学科模型输入输出参数及设定的设计空间
使用数据挖掘方法分析和提取电机多学科模型的关键特征参数,步骤如图10所示。
封装法将参数筛选视为搜索寻优问题,根据一定的算法和交叉验证获得的目标函数给出 最优的参数组合,基本框架如图11所示。以前向贪婪搜索(Greedy Search,GS)、粒子群搜 索(Particle Swarm Optimization,PSO)为搜索算法,以M5P树、随机森林(RandomForest, RF)和基于BP训练的多层感知机(Back-Propagation Multi-Layer Perceptron,BP-MLP)为预 测算法,以交叉验证获得的归一化均方根值作为寻优目标,对参数子集进行优化,获得筛选 结果如表2所示。
表2基于封装法的电机多学科模型关键特征参数提取结果
嵌入法利用某些机器学习算法本身即具有特征打分排序功能的特点,对数据样本进行训 练,获得各个特征的权值系数,据此筛选出对模型有重要意义的参数组合。使用二次回归 (Quadratic Regression,QR)、决策树(Decision Tree,DT)、RF、快速有监督(RapidSupervised method,RS)以及梯度(Gradient Boosting,GB)方法对电机多学科模型的参数的重要程度 开展分析,获得电机重量和损耗的关键参数如表3所示。
表3基于嵌入法的电机多学科模型关键特征参数提取结果
采用多数投票规则对表2和表3所示筛选结果进行综合,具体原理为
定义w
式中当第j个参数筛选方法排除了第i个参数时,V
部件参数的权重w
因此,根据多数投票规则,当Vt
设置各参数和各算法的权重均为1,则电机多学科模型的关键特征参数筛选过程如表4 所示,筛选结果如表5所示。
表4基于无偏好的多数投票对电机多学科模型关键特征参数的投票结果
表5电机多学科模型最终的关键特征参数筛选结果
利用机器学习算法建立满足系统集成设计需求的近似模型,步骤如图12所示。
采用k折交叉验证建立电机多学科模型的近似模型。k折交叉验证是指,将训练集分为k 份,轮流使用其中一份作为验证集、另外(k-1)份作为训练集,使用以上k种情况训练得到模 型,并使用整个训练集训练误差最小的模型。
采用表6所示预测算法,以表5中的关键参数分别建立电机重量和损耗的近似模型,经 过对这些模型决定系数、均方根误差、平均误差、最大误差以及消耗计算资源的综合对比, 选择径向基神经网络作为最终的预测算法。最后,使用一组新的数据样本对最终模型的性能 进行测试验证,电机重量的近似模型精度如图13所示,电机损耗的近似模型精度如图14所 示。
表6电机近似模型选用的预测算法
C:根据飞机功能及已知的设计条件(包括电源的类型和数目、汇流条的类型和数目、 负载的类型和数目等),基于平台的设计方法定义系统各部件功能,采用“自顶向下”和“自 底向上”的思想,使用定义的部件库自动生成系统网络拓扑,建立基于设计、功能及适航标 准的网络拓扑模型;而后根据设计经验和适航标准确定系统网络拓扑需要满足的约束条件(包 括系统网络拓扑设计经验产生的约束、需要满足的功能性约束、需要满足的可靠性性约束等), 建立约束条件关于网络拓扑的函数关系,并借助约束满足算法求解满足这些约束条件的网络 拓扑可行方案;接着,根据建立的网络拓扑模型计算网络的基本可靠度和各负载节点对应的 任务可靠度,形成基本可靠度和任务可靠度关于网络拓扑的函数关系,作为网络拓扑可靠性 的衡量依据,使用搜索算法求解获得满足可靠性要求的最优网络拓扑方案。
网络拓扑优化设计以2个230V 400Hz的发电机、1个400V辅助动力装置燃料电池、3个230V 400Hz交流汇流条、2个270V直流汇流条和3个28V直流汇流条以及8个分别挂在 各个汇流条上的储能组成的分布式系统为例进行说明:
定义飞机供电系统平台如表7所示。
表7飞机供电系统网络拓扑设计平台
根据图论,将系统部件分为两类:节点包括电源、汇流条和储能,有向边为变换器、开 关、电缆构成的支路。则可以根据各个节点的重要程度和供电体制使用有向边将其连接城一 个系统,该系统可以使用节点邻接矩阵表示节点之间的连接关系。
根据GJB181A、CCAR25-R4中国民用航空规章第25部等标准,建立系统约束条件的数 学模型。
航空规定,每个电源都必须只连接一个汇流条,实际电源连接参数数目等于电源数目N
为了保证系统的供电裕度,多个电源不能连接到同一个汇流条上,因此
汇流条连接参数主要指汇流条节点之间的连接关系和能量可以流动的方向,满足
根据分布式电源的基本思想,假设在满足其他约束的条件下,每个汇流条均挂载一个储 能系统;若容量配置过程中优化得到某处储能容量为零,则说明该处无储能。
根据飞机电网约定俗成的设计经验,电源节点和负载节点不能够直接相连,即
负载或汇流条节点必须存在输入,即
网络拓扑结构满足故障重构后的负载的供电可靠性要求,保证系统发生故障时负载的可 靠工作,即
式中No_of_failure为系统中发生故障的部件的数目;i
系统网络拓扑的供电能力约束是一个动态约束,设计人员需要依次对所有可能的故障情 况下系统供电路径的有无进行考察。
在系统故障重构过程中,系统满足:
系统工作时,任意节点i和j有
c
交流电源不能并联供电,因此根据电网络理论,源节点和交流汇流条节点组成的网络支 路数不能大于交流汇流条数目N
当飞机主电源均无故障时,若每个汇流条节点均有电,则辅助电源不启动。
飞机中还存在可以正常工作的主电源和辅助电源时,应急电源不启动。
为充分利用系统支路的容错能力,系统各支路在遍历的过程中必须至少出现一次,从而 保证每条支路在故障重构中都能够起到作用。
式中N
根据适航标准,系统必须满足:
起飞前,供电系统的失效率必须不高于1.33×10
λ
飞机出现任何降低飞机能力的失效情况的几率对应的失效率不大于10
λ
飞机出现次要的、会在一定程度上降低功能能力和安全余度的故障对应的失效率不大于 10
λ
使用智能优化算法对该问题进行求解,可以获得96组可行解。
建立系统基本可靠度和任务可靠度对应的失效率关于网络邻接矩阵的数学模型。使用遍 历法从96组可行解中获得可靠性的帕累托最优解如图15所示,图16给出了其中一个解。
D:根据前面获得的系统最佳网络拓扑方案,制定网络重构策略,生成各个方案可能存在 的工作状态集合,删除其中冗余和不具有代表性的状态;然后制定系统能量管理策略,建立 飞机供电系统动态功率模型,根据系统的功率需求,使用多目标优化算法对不同工作状态下 系统的燃油消耗、系统损耗和储能重量进行优化,获得能满足功率需求的最佳能量调度方案; 最后对同一网络拓扑方案下多个工作状态的优化结果进行综合,获得能够满足大部分工作状 态工作需求的容量配置方案。
采用多目标优化算法对飞机供电系统不同工作状态在整个飞行过程中的动态能量调度进 行优化规划,即
式中No_Scen为飞机供电系统工作状态的数目;PwrSc
下面以图17所示2个230V 400Hz的主发电机、1个400V辅助动力装置燃料电池、2个270V直流汇流条、2个28V直流汇流条、1个900V直流汇流条以及2个240V、2个24V、1 个540V的储能组成的分布式系统为例对供电系统容量优化配置进行说明:
首先以燃油消耗和系统损耗为输出,建立单个工作状态下系统的能量优化调度模型。
系统第i个工作状态的燃油损耗w
式中w
w
式中T为整个飞行时间;p
以整个飞行过程的平均损耗表示工作状态i下系统损耗pl
式中T为飞行总时间;支路损耗pl
当j=k时pl
式中pl
在系统动态运行过程中,根据各支路实时功率,可计算得到第i个储能系统的动态输入/ 出功率p
式中ΔSOC为储能最大充/放电深度;Cap
则整个飞行过程对储能容量的需求Cap则可以通过式90)计算得到。
然后考虑飞机供电系统不同的故障情况,生成系统工作状态集合。
设定系统故障重构过程必须满足
式中R(path
任一供电路径的可靠度为该路径上所有支路可靠度之积,考虑各支路可靠度相差不大(一 般最多相差一个变换器或者开关的可靠度),假设所有支路可靠度对应的失效率近似相等于 λ
式中path
为简化计算,在生成工作状态时忽略供电路径上开关和变换器的损耗,仅考虑l节点供 电路径的线路损耗,则
式中ρ
对于一个确定的系统而言,导线载流量I
因此,将损耗pl分解为供电路径长度和供电路径上节点的其他支路数目,即
故
接着对产生的大量工作状态进行缩减,采用基于支路负荷极限和信息量的方法,选择系 统每个支路的负荷极限情况的工作状态中包含信息量最多、最具代表性的工作状态作为该支 路的工作状态。则最能代表支路i的工作状态求解为
式中I
式中Pwr
最后,以系统可靠性、重量和损耗为目标,建立以部件容量、节点电压为输入的系统容 量配置模型,采用多目标优化算法优化系统网络拓扑、容量和节点电压,保证系统可靠性最 高、重量最小、损耗最小,即
式中R
可靠性包括基本可靠性和任务可靠性,以其对应的失效率进行计算。
飞机供电系统基本可靠度对应的失效率λ
其中,λ
其中,λ
飞机供电系统任务即保证每个负载节点的供电,因此任务可靠性根据系统中每个负载节 点的供电路径的可靠性进行计算。基于深度优先遍历搜索,求取负载节点l的供电路径集合 path
其中,N
但全概率公式计算量巨大,为简化计算,采用Aggrawal提出的“删去留下”法对最小路 集进行不交化处理,具体过程不再赘述。
重量W
式中W
式中N
根据节点i和j的不同类型,支路ij的重量W
式中当i=j时,W
线缆和开关的布局需要分具体情况讨论,有
式中W
燃料和储能系统的重量W
式中w
储能系统的重量w
式中w
由于不同工作状态下系统效率不同,以不同工作状态系统损耗的加权平均进行衡量,即
式中pl
假设工作状态k是由于p条支路br
式中R
在上述模型的基础上,采用图5所示优化框架,两个优化器均选择NSG-II算法,开展运 算,获得支路容量设计结果如表8所示,储能容量设计结果如表9所示。
表8飞机供电系统支路容量优化配置结果
表9飞机供电系统储能容量优化配置结果
- 一种飞机供电系统智能化集成设计系统及方法
- 智能化支吊架集成设计系统