一种生态水下观测机器人
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及机器人,更具体的说是一种生态水下观测机器人。
背景技术
例如公开号位CN205652313U一种海洋环境生态修复水下观测机器人,浮体设置于框架上方,与框架贴合,用于保持机器人姿态平衡;AMR微控制器置于框架内部,并通过脐带缆连接水面接收控制终端,多参数传感器固定于框架上,且连接AMR微控制器,将采集到的数据发送到AMR微控制器;视频观测模块固定于框架前端,且连接AMR微控制器,用于采集视频图像后发送到AMR微控制器;LED灯固定于浮体上,且与视频观测模块同侧,用于照明;自行履带模块设置于框架下端,且连接AMR微控制器。该实用新型在翻越和爬坡过程中机器人本身保持稳定,不会失去平衡而翻倒;节省了电缆的数量,从而实现一个8芯揽上的数据和供电的传输,解决了水下ROV的线缆粗与多的问题,在海水中可免于高盐度腐蚀。但该机器人不便于在湿地环境下进行观测。
发明内容
本发明的目的是提供一种生态水下观测机器人,可以在湿地环境下观测。
本发明的目的通过以下技术方案来实现:
一种生态水下观测机器人,包括水上部分和水下部分,所述水上部分能够接收水下部分,所述水下部分能够与水上部分分离,所述水上部分包括浮板、轴Ⅱ、拨叶和弧形脚,浮板镜像对称设置,每个浮板中部的上侧转动连接轴Ⅱ,每个轴Ⅱ上周向均匀固接多个拨叶,每个拨叶的外端固接一个弧形脚,每个浮板的中部设有方口,所述方口用于拨叶和弧形脚绕轴Ⅱ的轴线转动至浮板的下方。
所述水上部分还包括机体Ⅰ、轴Ⅰ、带轮Ⅰ、弯折架和带轮Ⅱ,机体Ⅰ设置在两个浮板上方的中部,机体Ⅰ的左右两端均固接一个轴Ⅰ,两个轴Ⅰ的外端均固接一个带轮Ⅰ,两个轴Ⅱ的内端均固接一个带轮Ⅱ,两个带轮Ⅰ分别与两个带轮Ⅱ通过皮带传动连接,机体Ⅰ内设有两个电机Ⅰ,所述两个电机Ⅰ分别驱动两个轴Ⅰ实现转动,机体Ⅰ通过弯折架与浮板固接。
所述水下部分包括机体Ⅱ、气囊、导气管、电动推杆Ⅱ、活塞、肢体、菱形脚和螺旋叶,机体Ⅱ内的左右两侧分别设有容腔Ⅰ和容腔Ⅱ,气囊安装在容腔Ⅱ内,气囊为柔性材料且能够随内部气压改变而改变自身体积的大小,气囊通过导气管与容腔Ⅰ连通,电动推杆Ⅱ安装在容腔Ⅰ内,活塞固接在电动推杆Ⅱ的活动端,活塞滑动连接在容腔Ⅰ内,容腔Ⅰ内设有交换口,所述交换口位于活塞的左侧,电动推杆Ⅱ位于活塞的右侧,机体Ⅱ左右两端的前后两端均转动连接一个肢体,每个肢体均通过一个电机Ⅱ驱动实现转动,所述电机Ⅱ安装在机体Ⅱ内,每个肢体的外端固接一个菱形脚,螺旋叶设置在机体Ⅱ的右侧,螺旋叶通过电机Ⅲ驱动实现转动,所述电机Ⅲ安装在机体Ⅱ内。
所述水下部分还包括塞柱、方杆、连接块和下接架,塞柱的上下两端均固接一个方杆,两个方杆分别滑动连接在连接块和下接架上,连接块固接在容腔Ⅰ内,下接架固接在机体Ⅱ的下端,塞柱滑动连接在所述开口内。
所述浮板的左右两端均朝外侧向上延伸。
所述水上部分还包括电动推杆Ⅰ、电机Ⅰ、水平板和三折架,电动推杆Ⅰ的活动端固接电机Ⅰ,电机Ⅰ的输出轴固接水平板,水平板的下端固接阵列设置的三折架,机体Ⅱ能够搭在所述三折架上,电动推杆Ⅰ安装在机体Ⅰ上,电动推杆Ⅰ的活动端由上至下穿过机体Ⅰ。
该生态水下观测机器人还包括透明外壳,透明外壳固接在机体Ⅰ的下端,透明外壳能够罩住所述水下部分。
该生态水下观测机器人还包括电动推杆Ⅲ、电机Ⅱ、收集箱和刀刃,所述电动推杆Ⅲ的活动端固接电机Ⅱ,电机Ⅱ的输出轴周向均匀固接三个收集箱,每个收集箱的开口处固接两个上下对称设置的刀刃,电动推杆Ⅲ固接在机体Ⅰ的左端,电动推杆Ⅲ的活动端由上至下穿过机体Ⅰ。
所述收集箱的内端设有走水孔。
所述透明外壳的材质为亚克力。
本发明一种生态水下观测机器人的有益效果为:
调节三折架的高度或朝向,便于将水下部分投入到水中或接收机体Ⅱ,进而降低对接收精度的要求。菱形脚优选为空心的塑料,具有一定浮力,当位于左侧的菱形脚逆时针转动朝下,机体Ⅱ的重心位于整体的左侧,进而左侧先行下降便于位于左侧的菱形脚扎入湿地底部进行固定。利用垂直后的菱形脚下窄上宽的结构便于与泥土脱离,且此时螺旋叶倾斜,可直接启动螺旋叶提供推力使菱形脚脱离湿地底部,随后使垂直的菱形脚复位变为水平提供浮力,活塞向左运动排水快速使所述水下部分上升,随后改变水上部分的位置使机体Ⅱ位于三折架的上方以便于回收,因释放时的位置也是回收时的位置,进而水上部分进行调节回收时进行直线运动即可。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
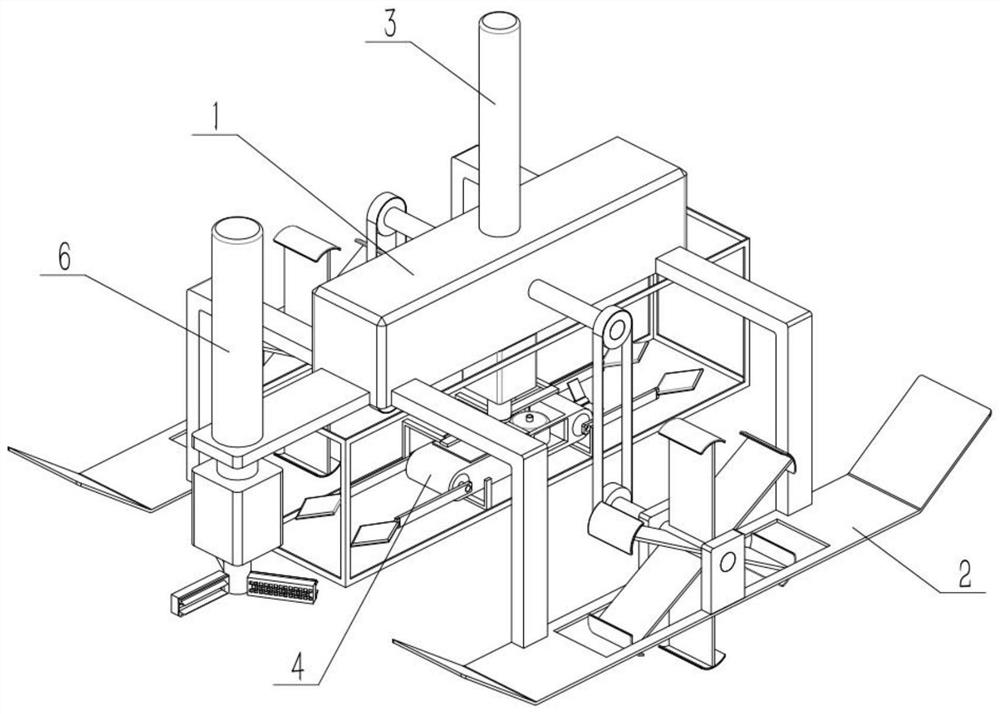
图1是本发明一种生态水下观测机器人的整体结构示意图;
图2是本发明的部分结构示意图一;
图3是本发明的部分结构示意图二;
图4是本发明的部分结构示意图三;
图5是本发明的部分结构示意图四;
图6是本发明的部分结构示意图五;
图7是本发明的部分结构示意图六;
图8是本发明的部分结构示意图七。
图中:机体Ⅰ1;轴Ⅰ101;带轮Ⅰ102;弯折架103;透明外壳104;浮板2;轴Ⅱ201;带轮Ⅱ202;拨叶203;弧形脚204;电动推杆Ⅰ3;电机Ⅰ301;水平板302;三折架303;机体Ⅱ4;气囊401;导气管402;电动推杆Ⅱ403;活塞404;肢体405;菱形脚406;螺旋叶407;塞柱5;方杆501;连接块502;下接架503;电动推杆Ⅲ6;电机Ⅱ601;收集箱602;刀刃603。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
如图所示,一种生态水下观测机器人,包括水上部分和水下部分,所述水上部分能够接收水下部分,所述水下部分能够与水上部分分离,所述水上部分包括浮板2、轴Ⅱ201、拨叶203和弧形脚204,浮板2镜像对称设置,每个浮板2中部的上侧转动连接轴Ⅱ201,每个轴Ⅱ201上周向均匀固接多个拨叶203,每个拨叶203的外端固接一个弧形脚204,每个浮板2的中部设有方口,所述方口用于拨叶203和弧形脚204绕轴Ⅱ201的轴线转动至浮板2的下方。利用拨叶203的转动驱动水上部分在水面上行进,在湿地环境下行进时遇到湿地植物时,利用浮板2临时经过湿地植物,弧形脚204便于在湿地植物上行进且降低对湿地植物的损坏。到达指定观测位置时,使水下部分与水上部分分离,水下部分上安装有录像设备已进行观察记录。
具体实施方式二:
如图所示,所述水上部分还包括机体Ⅰ1、轴Ⅰ101、带轮Ⅰ102、弯折架103和带轮Ⅱ202,机体Ⅰ1设置在两个浮板2上方的中部,机体Ⅰ1的左右两端均固接一个轴Ⅰ101,两个轴Ⅰ101的外端均固接一个带轮Ⅰ102,两个轴Ⅱ201的内端均固接一个带轮Ⅱ202,两个带轮Ⅰ102分别与两个带轮Ⅱ202通过皮带传动连接,机体Ⅰ1内设有两个电机Ⅰ,所述两个电机Ⅰ分别驱动两个轴Ⅰ101实现转动,机体Ⅰ1通过弯折架103与浮板2固接。利用两个电机Ⅰ分别驱动,进而使位于两侧的拨叶203转速不同实现转弯,机体Ⅰ1位于水上主要搭载电子器件和其他支持,如GPS定位系统、蓄电池、对水下部分的充电设备和电动机等。启动电机Ⅰ,电机Ⅰ的输出轴带动轴Ⅰ101转动,轴Ⅰ101带动带轮Ⅰ102转动,带轮Ⅰ102带动带轮Ⅱ202转动,带轮Ⅱ202带动拨叶203转动。
具体实施方式三:
如图所示,所述水下部分包括机体Ⅱ4、气囊401、导气管402、电动推杆Ⅱ403、活塞404、肢体405、菱形脚406和螺旋叶407,机体Ⅱ4内的左右两侧分别设有容腔Ⅰ和容腔Ⅱ,气囊401安装在容腔Ⅱ内,气囊401为柔性材料且能够随内部气压改变而改变自身体积的大小,气囊401通过导气管402与容腔Ⅰ连通,电动推杆Ⅱ403安装在容腔Ⅰ内,活塞404固接在电动推杆Ⅱ403的活动端,活塞404滑动连接在容腔Ⅰ内,容腔Ⅰ内设有交换口,所述交换口位于活塞404的左侧,电动推杆Ⅱ403位于活塞404的右侧,机体Ⅱ4左右两端的前后两端均转动连接一个肢体405,每个肢体405均通过一个电机Ⅱ驱动实现转动,所述电机Ⅱ安装在机体Ⅱ4内,每个肢体405的外端固接一个菱形脚406,螺旋叶407设置在机体Ⅱ4的右侧,螺旋叶407通过电机Ⅲ驱动实现转动,所述电机Ⅲ安装在机体Ⅱ4内。容腔Ⅰ内且活塞404的左侧为液体,相对的右侧为气体,启动电动推杆Ⅱ403带动活塞404左右运动,当活塞404向左运动,容腔Ⅰ内且位于活塞404的右侧空间增大吸入气体,进而气囊401体积减小,活塞404左侧的液体通过所述开口排出,进而便于漂浮在水面上。当活塞404向右侧运动,容腔Ⅰ内气体被挤回气囊401,气囊401的体积增加,当机体Ⅱ4在水上时将会通过所述交换口吸取水,此时机体Ⅱ4内水增加便于下潜至指定位置进行记录。
具体实施方式四:
如图所示,所述水下部分还包括塞柱5、方杆501、连接块502和下接架503,塞柱5的上下两端均固接一个方杆501,两个方杆501分别滑动连接在连接块502和下接架503上,连接块502固接在容腔Ⅰ内,下接架503固接在机体Ⅱ4的下端,塞柱5滑动连接在所述开口内。塞柱5防止杂物进入机体Ⅱ4内。
具体实施方式五:
如图所示,所述浮板2的左右两端均朝外侧向上延伸以便于浮板2经过湿地植物。
具体实施方式六:
如图所示,所述水上部分还包括电动推杆Ⅰ3、电机Ⅰ301、水平板302和三折架303,电动推杆Ⅰ3的活动端固接电机Ⅰ301,电机Ⅰ301的输出轴固接水平板302,水平板302的下端固接阵列设置的三折架303,机体Ⅱ4能够搭在所述三折架303上,电动推杆Ⅰ3安装在机体Ⅰ1上,电动推杆Ⅰ3的活动端由上至下穿过机体Ⅰ1。启动电动推杆Ⅰ3调节三折架303的高度,进而便于将水下部分投入到水中,随后水下部分利用螺旋叶407与三折架303分离。或利用三折架303下降到水中准备接收机体Ⅱ4,启动电机Ⅰ301改变多个三折架303构成产生的开口方向,进而改变释放时或接收时的方向。回收时无需精准调节机体Ⅱ4的位置。释放后,使位于左侧的两个肢体405逆时针转动由水平变为垂直,使活塞404向右运动,进而水下部分下潜,下潜后位于左侧的菱形脚406优先扎在湿地底部,位于右侧的菱形脚406随后略微扎入湿地底部,此时机体Ⅱ4左高右低,自动完成固定,这是由于菱形脚406优选为空心的塑料,具有一定浮力,当位于左侧的菱形脚406逆时针转动朝下,机体Ⅱ4的重心位于整体的左侧,进而左侧先行下降便于位于左侧的菱形脚406扎入湿地底部。利用垂直后的菱形脚406下窄上宽的结构便于与泥土脱离,且此时螺旋叶407倾斜,可直接启动螺旋叶407提供推力使菱形脚406脱离湿地底部,随后使垂直的菱形脚406复位变为水平提供浮力,活塞404向左运动排水快速使所述水下部分上升,随后改变水上部分的位置使机体Ⅱ4位于三折架303的上方以便于回收,因释放时的位置也是回收时的位置,进而水上部分进行调节回收时进行直线运动即可。
具体实施方式七:
如图所示,该生态水下观测机器人还包括透明外壳104,透明外壳104固接在机体Ⅰ1的下端,透明外壳104能够罩住所述水下部分。透明外壳104保护回收的水下部分在水上部分行进时,不受湿地植物或风浪的影响。
具体实施方式八:
如图所示,该生态水下观测机器人还包括电动推杆Ⅲ6、电机Ⅱ601、收集箱602和刀刃603,所述电动推杆Ⅲ6的活动端固接电机Ⅱ601,电机Ⅱ601的输出轴周向均匀固接三个收集箱602,每个收集箱602的开口处固接两个上下对称设置的刀刃603,电动推杆Ⅲ6固接在机体Ⅰ1的左端,电动推杆Ⅲ6的活动端由上至下穿过机体Ⅰ1。当湿地植物无法使水下部分下降时利用电动推杆Ⅲ6调节刀刃603的高度,启动电机Ⅱ601带动刀刃603转动对湿地植物进行割除,因定点投放进行局部的在释放位置割除即可,收集箱602可收集该植物碎片进行取样。
具体实施方式九:
如图所示,所述收集箱602的内端设有走水孔。走水孔便于刀刃603在水面下进行切割时收集样本,因走水孔排水,样本随水流附着在收集箱602内壁。
具体实施方式十:
如图所示,所述透明外壳104的材质为亚克力。
本发明的一种生态水下观测机器人,其工作原理为:
利用拨叶203的转动驱动水上部分在水面上行进,在湿地环境下行进时遇到湿地植物时,利用浮板2临时经过湿地植物,弧形脚204便于在湿地植物上行进且降低对湿地植物的损坏。到达指定观测位置时,使水下部分与水上部分分离,水下部分上安装有录像设备已进行观察记录。利用两个电机Ⅰ分别驱动,进而使位于两侧的拨叶203转速不同实现转弯,机体Ⅰ1位于水上主要搭载电子器件和其他支持,如GPS定位系统、蓄电池、对水下部分的充电设备和电动机等。启动电机Ⅰ,电机Ⅰ的输出轴带动轴Ⅰ101转动,轴Ⅰ101带动带轮Ⅰ102转动,带轮Ⅰ102带动带轮Ⅱ202转动,带轮Ⅱ202带动拨叶203转动。容腔Ⅰ内且活塞404的左侧为液体,相对的右侧为气体,启动电动推杆Ⅱ403带动活塞404左右运动,当活塞404向左运动,容腔Ⅰ内且位于活塞404的右侧空间增大吸入气体,进而气囊401体积减小,活塞404左侧的液体通过所述开口排出,进而便于漂浮在水面上。当活塞404向右侧运动,容腔Ⅰ内气体被挤回气囊401,气囊401的体积增加,当机体Ⅱ4在水上时将会通过所述交换口吸取水,此时机体Ⅱ4内水增加便于下潜至指定位置进行记录。塞柱5防止杂物进入机体Ⅱ4内。浮板2的左右两端均朝外侧向上延伸以便于浮板2经过湿地植物。启动电动推杆Ⅰ3调节三折架303的高度,进而便于将水下部分投入到水中,随后水下部分利用螺旋叶407与三折架303分离。或利用三折架303下降到水中准备接收机体Ⅱ4,启动电机Ⅰ301改变多个三折架303构成产生的开口方向,进而改变释放时或接收时的方向。回收时无需精准调节机体Ⅱ4的位置。释放后,使位于左侧的两个肢体405逆时针转动由水平变为垂直,使活塞404向右运动,进而水下部分下潜,下潜后位于左侧的菱形脚406优先扎在湿地底部,位于右侧的菱形脚406随后略微扎入湿地底部,此时机体Ⅱ4左高右低,自动完成固定,这是由于菱形脚406优选为空心的塑料,具有一定浮力,当位于左侧的菱形脚406逆时针转动朝下,机体Ⅱ4的重心位于整体的左侧,进而左侧先行下降便于位于左侧的菱形脚406扎入湿地底部。利用垂直后的菱形脚406下窄上宽的结构便于与泥土脱离,且此时螺旋叶407倾斜,可直接启动螺旋叶407提供推力使菱形脚406脱离湿地底部,随后使垂直的菱形脚406复位变为水平提供浮力,活塞404向左运动排水快速使所述水下部分上升,随后改变水上部分的位置使机体Ⅱ4位于三折架303的上方以便于回收,因释放时的位置也是回收时的位置,进而水上部分进行调节回收时进行直线运动即可。透明外壳104保护回收的水下部分在水上部分行进时,不受湿地植物或风浪的影响。当湿地植物无法使水下部分下降时利用电动推杆Ⅲ6调节刀刃603的高度,启动电机Ⅱ601带动刀刃603转动对湿地植物进行割除,因定点投放进行局部的在释放位置割除即可,收集箱602可收集该植物碎片进行取样。走水孔便于刀刃603在水面下进行切割时收集样本,因走水孔排水,样本随水流附着在收集箱602内壁。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种生态水下观测机器人
- 一种基于环境生态修复水下观测机器人