一种消防搜救机器人的操作方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及到一种机器人,特别涉及一种消防搜救机器人的操作方法。
背景技术
近年来,在消防队进行灭火的过程中,为了对危险且不可靠近的火源进行处理,使用了通过无线等进行远距离操作的消防机器人,消防机器人能够代替消防员进入灾害现场进行消防作战,最大限度的保障消防抢险救援人员人身安全;但是现有的消防机器人大多采用在机器人主体上设有水箱和蓄电池,体积较大,水箱储存的水量有限,在灭火的过程中水压小,灭火效率低;还有的消防机器人是利用自身携带的用干粉、泡沫或二氧化碳进行灭火,这种消防机器人只能对较小的火源进行灭火,在火源较大时,还得消防员来进入火场进行扑灭。
公布号CN 2042275357U,提出的一种消防搜救机器人的操作方法,与被围困的人员双工通信;被火灾围困的人员可以从搜救主体取出供氧装置和灭火装置进行暂时自救,以便等待救援人员;水炮可以对被火灾围困的人员周围的火点进行灭火操作;在火场中当搜救主体温度超过设定的温度值时,控制降温喷头的电磁阀打开,通过降温喷头开始对搜救主体进行降温喷水;搜救结后,断开消防软管、高柔性电缆两端,旋转软管卷盘使水电传送软管盘绕在软管卷盘上,然后操控控制器使搜救主体回到底座顶部,但是存在降温喷头在固定在机器人上,在狭窄的位置时难以活动自如,导致降温喷头难以对准火苗处,对灭火造成影响
发明内容
发明的目的在于提供一种消防搜救机器人的操作方法,具有喷水管可以旋转,在机器人不动情况下进行灭火的优点,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种消防搜救机器人,包括具有中空结构的壳体和固定于壳体底部的运行架,所述壳体的顶部圆心处固定有竖直方向的主杆,主杆的内部与壳体的内腔相通,壳体的内部固定有用于分隔的隔板,壳体的外周面上固定有上环板和下环板,所述主杆的外周面上套有活动的环体A和环体B,主杆的外壁上还依次固定交错分布在环体A和环体B上的底环板和中环板,主杆的顶部安装有顶弧罩,所述运行架上贯穿有旋转轴,旋转轴的外壁上套有用于移动的履带,所述隔板一侧的壳体底壁上固定有水箱,隔板另一侧的壳体底壁上固定有控制板,所述上环板和下环板的外部卡有活动连接的监控环,监控环上安装有照明灯和摄像头,照明灯和摄像头均通过控制线与控制板相连,所述环体A和环体B的外壁上分别固定有水平方向的喷水管A和喷水管B,喷水管A和喷水管B的管口上均套有喷水器,所述水箱连接的抽水泵输出端上套有贯穿主杆的送水管,送水管通过三通管分别与主水管和副水管相接,主水管和副水管的另一端管口分别位于喷水管A和喷水管B的内腔,并与喷水器相接。
优选的,所述环体A和环体B绕主杆旋转,环体A和环体B内安装有旋转的磁片,主杆与环体A和环体B接触的面套有线圈。
优选的,所述底环板、中环板和顶弧罩分别距离环体A和环体B的间距为3cm。
优选的,所述主水管的直径与底环板的直径相同,副水管的直径与中环板的直径相同。
优选的,所述顶弧罩由实心的不锈钢材料制成,底环板和中环板均为圆台结构。
优选的,所述上环板和下环板的竖截面为相互对称的“L型”,监控环的内周面开设有与“L型”截面相匹配的槽位。
与现有技术相比,本发明的有益效果是:本消防搜救机器人,照明灯照亮后可以显示没有光源的地方,摄像头将火灾现象的画面进行实时传输,环体A和环体B可以绕主杆进行转动,遇到多处火源时,主水管和副水管可以跟随环体A和环体B进行旋转,旋转的角度,由控制板上的器件控制,利用无线信号发送至消防员的手持设备上,消防员进行无线遥控消防搜救机器人,方便进行两处同时灭火的同时,也可以集中在一起灭较大的火源。
附图说明
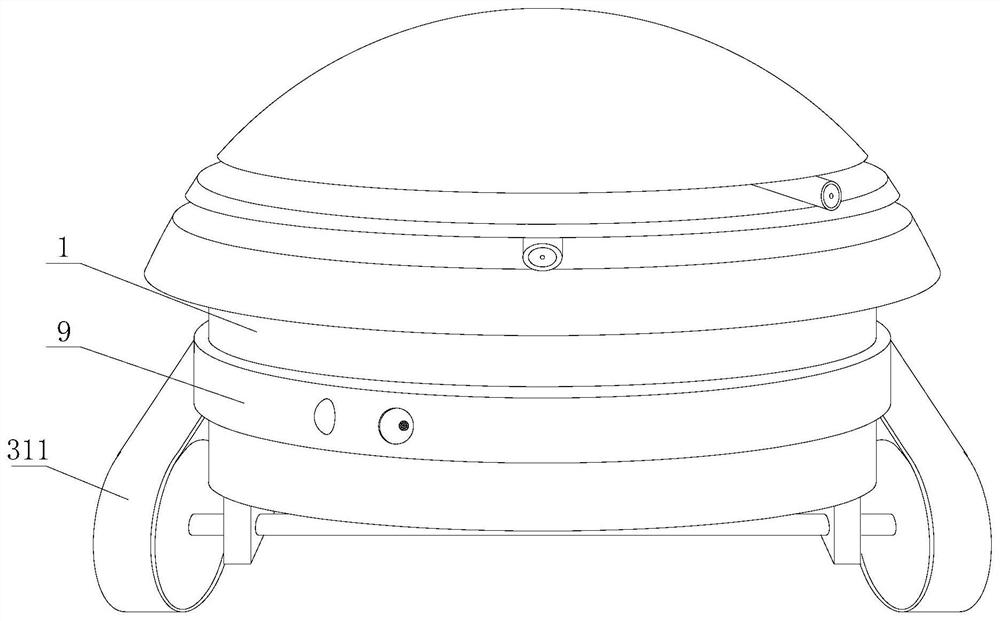
图1为本发明的消防搜救机器人的整体结构图;
图2为本发明的消防搜救机器人的局部结构图;
图3为本发明的消防搜救机器人的监控环结构图;
图4为本发明的消防搜救机器人的上下环板结构图;
图5为本发明的消防搜救机器人的分层图;
图6为本发明的消防搜救机器人的壳体内部结构图。
图中:1壳体、11水箱、111抽水泵、1111送水管、12隔板、13上环板、14下环板、15控制板、2主杆、3运行架、31旋转轴、311履带、4环体A、41喷水管A、411主水管、5环体B、51喷水管B、511副水管、6底环板、7中环板、8顶弧罩、9监控环、91照明灯、92摄像头、93喷水器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-2,一种消防搜救机器人,包括具有中空结构的壳体1和固定于壳体1底部的运行架3,运行架3上安装有与旋转轴31连接的动力电机,为旋转轴31的转动提供动力,壳体1的顶部圆心处固定有竖直方向的主杆2,主杆2的外周面上套有活动的环体A4和环体B5,环体A4和环体B5可以绕主杆2进行转动,环体A4和环体B5绕主杆2旋转,环体A4和环体B5内安装有旋转的磁片,主杆2与环体A4和环体B5接触的面套有线圈,利用无刷电机的特性和电磁感应,让环体A4和环体B5绕主杆2的表面进行旋转,旋转的角度,由控制板15上的器件控制,利用无线信号发送至消防员的手持设备上,消防员进行无线遥控,主杆2的外壁上还依次固定交错分布在环体A4和环体B5上的底环板6和中环板7,底环板6和中环板7保护主水管411和副水管511,避免在外力的作用下发生弯曲,底环板6、中环板7和顶弧罩8分别距离环体A4和环体B5的间距为3cm,不影响环体A4和环体B5的旋转,主杆2的顶部安装有顶弧罩8,顶弧罩8由实心的不锈钢材料制成,底环板6和中环板7均为圆台结构,能够耐得住高温的同时,具有良好的抗变形能力,运行架3上贯穿有旋转轴31,旋转轴31的外壁上套有用于移动的履带311,旋转轴31转动带动履带311旋转,从而控制这个设备的移动。
请参阅图3,监控环9上安装有照明灯91和摄像头92,照明灯91和摄像头92均通过控制线与控制板15相连,控制板15上控制照明灯91和摄像头92的情况,照明灯91照亮后可以显示没有光源的地方,摄像头92将火灾现象的画面进行实时传输。
请参阅图4-5,环体A4和环体B5的外壁上分别固定有水平方向的喷水管A41和喷水管B51,喷水管A41和喷水管B51的管口上均套有喷水器93,喷水器93将喷水管上的水高压喷出,水箱11连接的抽水泵111输出端上套有贯穿主杆2的送水管1111,送水管1111将由抽水泵111从水箱11内抽出的水送走,送水管1111通过三通管分别与主水管411和副水管511相接,主水管411和副水管511进行分流,主水管411的直径与底环板6的直径相同,副水管511的直径与中环板7的直径相同,避免掉落的物体与主水管411和副水管511发生接触造成损伤,主水管411和副水管511的另一端管口分别位于喷水管A41和喷水管B51的内腔,并与喷水器93相接,完成喷水,对一些小部分的火源进行灭火,主水管411和副水管511可以跟随环体A4和环体B5进行旋转,方便进行两处同时灭火的同时,也可以集中在一起灭较大的火源。
请参阅图6,主杆2的内部与壳体1的内腔相通,壳体1的内部固定有用于分隔的隔板12,隔板12将壳体1内部进行分隔,壳体1的外周面上固定有上环板13和下环板14,隔板12一侧的壳体1底壁上固定有水箱11,隔板12另一侧的壳体1底壁上固定有控制板15,上环板13和下环板14的外部卡有活动连接的监控环9,上环板13和下环板14的竖截面为相互对称的“L型”,监控环9的内周面开设有与“L型”截面相匹配的槽位,监控环9同样可以在上环板13和下环板14上进行旋转,方便及时查看周围的情况,做出最快的选择和处理。
工作原理:旋转轴31的外壁上套有用于移动的履带311,旋转轴31转动带动履带311旋转,从而控制这个设备的移动,照明灯91照亮后可以显示没有光源的地方,摄像头92将火灾现象的画面进行实时传输,环体A4和环体B5可以绕主杆2进行转动,遇到多处火源时,环体A4和环体B5绕主杆2旋转,环体A4和环体B5内安装有旋转的磁片,主杆2与环体A4和环体B5接触的面套有线圈,利用无刷电机的特性和电磁感应,让环体A4和环体B5绕主杆2的表面进行旋转,主水管411和副水管511可以跟随环体A4和环体B5进行旋转,旋转的角度,由控制板15上的器件控制,利用无线信号发送至消防员的手持设备上,消防员进行无线遥控消防搜救机器人,方便进行两处同时灭火的同时,也可以集中在一起灭较大的火源。
综上所述,本发明提出的消防搜救机器人,照明灯91照亮后可以显示没有光源的地方,摄像头92将火灾现象的画面进行实时传输,环体A4和环体B5可以绕主杆2进行转动,遇到多处火源时,主水管411和副水管511可以跟随环体A4和环体B5进行旋转,旋转的角度,由控制板15上的器件控制,利用无线信号发送至消防员的手持设备上,消防员进行无线遥控消防搜救机器人,方便进行两处同时灭火的同时,也可以集中在一起灭较大的火源。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种消防搜救机器人的操作方法
- 一种全织物皮肤感知自主柔性变形搜救机器人及其操作方法