一种正八棱台压阻式柔性触觉传感器阵列及其工作方法
文献发布时间:2023-06-19 09:52:39
技术领域
本发明属于触觉传感器技术领域,具体涉及一种正八棱台压阻式柔性触觉传感器阵列及其工作方法。
背景技术
在过去的几十年中,随着触觉传感器的研究技术的迅速发展,以人体皮肤为灵感的软电子设备在健康监测和诊断,机器人技术和假肢修复方面吸引了广泛的研究关注。柔软可穿戴的压阻式压力传感器以其简单的机械结构,紧凑的结构,低成本和低功耗的能源以及易于信号采集和转换的优点,成为开发高级电子皮肤的最有吸引力的候选者之一。作为下一代电子产品,可穿戴软设备可以设置为与我们的身体融合,以扩展我们的感知或实时提供有关个人健康的重要见解,得益于其突出的传感功能,它可以用作仿生假体和机器人的人造皮肤或电子皮肤,这将大大改善人机交互并促进人工智能系统的发展。
目前,已经开发出具有不同结构和转导机制的各种压力传感器,例如电容式、压阻式、压电式、光学式等。其中,压阻式柔性触觉传感器由于具有易于构造、宽动态响应范围、灵敏度高和可阵列化排布等优势而被广泛使用。压阻式柔性传感器需要将所受压力,转化为传感单元的拉伸形变。如今,微结构是提高压阻式压力传感器(尤其是接触式电阻式压力传感器)性能的最常用技术之一。因此,设计合适的结构,辅助传感单元在受压力时的拉伸形变,对提升传感器的灵敏度至关重要。
发明内容
本发明的目的在于提供一种供一种精度以及稳定性高的正八棱台压阻式柔性触觉传感器阵列及其工作方法。
为实现以上目的,本发明采取如下技术方案:
本发明提供一种正八棱台压阻式柔性触觉传感器阵列及其工作方法,其包括多个有序排列的柔性敏感结构(A)和填充在敏感结构单元(A)之间的由柔性绝缘材料制备而成的基底(B),其特征在于,柔性敏感结构单元(A)为正八棱台结构,所述柔性敏感结构单元(A)包括八个侧面,上端面,以及与上端面平行的下端面,其中上端面的两条边平行于x轴,则有另外两条边平行于y轴,所述八个侧面分别贴有一个电触点。
所述敏感结构单元为矩形阵列排布。
所述柔性敏感结构单元由具有压阻效应的纤维素纳米纤维(CNF)、聚氨酯(PU)、聚苯乙烯磺酸盐(PSS)和3,4-乙烯二氧噻吩单体(EDOT)所组成的聚合物(CNF-PSS:EDOT-PU)制备而成。
所述柔性基底由聚二甲基硅氧烷(PDMS)制备而成。
所述柔性敏感结构单元的上端面的边长为所述下端面的边长的两倍。
所述柔性敏感结构单元的高为上端面的边长的0.5倍。
所述敏感结构单元的上端面与四个侧面以及下端面等效形成电阻R1~ R8,通过测量敏感结构的等效电阻,根据压阻方程F
所述传感器敏感结构单元A的三维力,通过以下公式解析获得:
F
F
F
其中,F
本发明的触觉传感器需要进行标定,用不同大小的力反复作用于X、Y和 Z方向,并测得在不同作用力情况下对应的各个电触点的电阻值之间的关系,以此方式实现传感器的标定,然后利用相关的机器学习算法得到触觉传感器各个电阻与三维力之间的数学关系。
本发明具有的有益效果是:
(1)由于压阻材料采用生物质材料纤维素纳米纤维(CNF)及聚氨酯 (PU)为主,因而具备成本便宜的优点。
(2)采用聚二甲基硅氧烷(PDMS)制作柔性基底具有疏水自清洁自保护的功能,能够减少后期维护。
(3)可通过简单的切割技术或模具灌装技术制作得到,工艺简单,可按需求制作大小合适的传感器,适用范围广。
(4)采用正八面体结构,将传感器表面所受到的力分解到8个下侧面,提高了识别传感器力的方向的精度,稳定性,灵敏度高。
(5)其可以用于追踪连续的运动轨迹。
(6)本发明提供的正八棱台压阻式柔性触觉传感器阵列结构简单。
附图说明
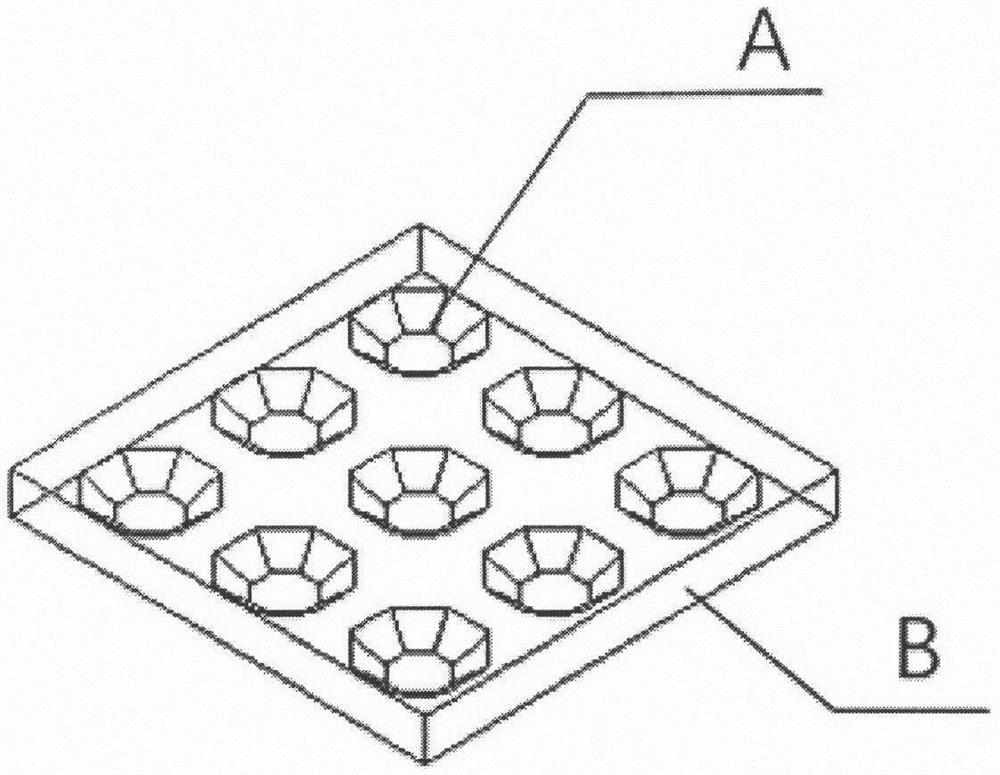
图1为本发明正八棱台压阻式柔性触觉传感器阵列的立体示意图。
图2为本发明正八棱台压阻式柔性触觉传感器敏感结构单元。
图3为本发明正八棱台压阻式柔性触觉传感器敏感结构单元受力分析图。
图4为本发明正八棱台压阻式柔性触觉传感器阵列上的施力触点滑动轨迹。
具体实施方式
下面将根据本发明实施例中的附图,对本发明实施例中的技术方案做进一步说明。显然,本发明的说明并不限定本发明的保护范围。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,正八棱台压阻式柔性触觉传感器阵列包括若干个有序排列的敏感结构单元A,敏感结构单元A之间填充有由柔性绝缘材料制备而成的基体B。正八棱台压阻式柔性触觉传感器柔性敏感结构单元A为正八棱台结构,由纤维素纳米纤维(CNF)、聚氨酯(PU)、聚苯乙烯磺酸盐(PSS)和3,4-乙烯二氧噻吩单体(EDOT)所组成的聚合物(CNF-PSS:EDOT-PU)制备而成,基底B由聚二甲基硅氧烷(PDMS)制备而成。
如图2所示,正八棱台的上下端面平行于三维直角坐标XOY,上端面分别与八个侧面等效形成电阻R
本发明的触觉传感器的上端面受到外界作用力的情况下,内部发生形变,所受到的力可分解到八个侧面。根据柔性触觉传感器的力敏状态方程F
如图3所示,触觉传感器敏感单元A的三维受力如下:
F
F
F
其中,F
本发明的触觉传感器需要进行标定,用不同大小的力反复作用于X、Y和 Z方向,并测得在不同作用力情况下对应的各个电触点的电阻值之间的关系,以此方式实现传感器的标定,然后利用相关的机器学习算法得到触觉传感器各个电阻与三维力之间的数学关系。
如图4所示,本发明的柔性触觉传感器阵列可追踪连续的运动轨迹,当施力点从A
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种正八棱台压阻式柔性触觉传感器阵列及其工作方法
- 一种正八棱台压阻式柔性触觉传感器及其工作方法