主被动康复训练系统上下肢协同训练控制方法和控制系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种康复训练控制方法和控制系统,具体涉及一种主被动康复训练系统上下肢协同训练控制方法和控制系统;属于医疗康复训练技术领域。
背景技术
四肢联动训练方法属于临床运动疗法分类中应用器械进行运动康复治疗伤/病/残患者恢复或改善功能障碍的方法,通过自主控制的肢体被动康复运动功能训练,抑制异常、原始的反射活动,改善运动模式,重建正常的运动功能。训练过程中,可让上肢带动下肢,健侧带动患侧,一肢带动三肢,同时加强较弱肌肉力量训练,从而进行早期主动有氧训练,达到防治并发症、减少后遗症的目的,也可以有效改善运功功能障碍患者的核心肌力、协调能力和平衡控制能力,同时调整心理状态,促进功能恢复,适用于中风、脊髓损伤、骨关节疾病、心肺康复、有氧训练等多种疾病导致的运动功能障碍。
目前常见的四肢联动设备有两类:一类是专用的四肢联动康复训练仪,采用物理或电磁调节方式,专门用以进行四肢康复训练,这类训练器存在功能较为单一,体积大等问题;另一类为依托上下肢主被动康复训练器,通过电机的控制实现四肢联动训练的设备,但是这类设备没有充分考虑四肢运动的协同性,容易出现上下肢干涉、部分四肢联动功能缺失、训练质量较差等问题。
鉴于以上不足,有必要对康复训练控制方法进行优化。
发明内容
为解决现有技术的不足,本发明的目的在于提供一种以上下肢主被动康复训练系统为基础的上下肢协同训练控制方法和控制系统,为用户提供更加安全的主动运动,真正实现四肢联动模式。
为了实现上述目标,本发明采用如下的技术方案:
本发明首先公布了一种主被动康复训练系统上下肢协同训练控制方法,包括如下步骤:
S1、康复训练系统的上下肢执行器使能;
S2、调整康复训练系统的上肢执行器角度和下肢执行器角度相同;
S3、上肢执行器顺时针旋转,使上肢执行器角度超前下肢执行器90°;
S4、开始训练,包括如下子步骤:
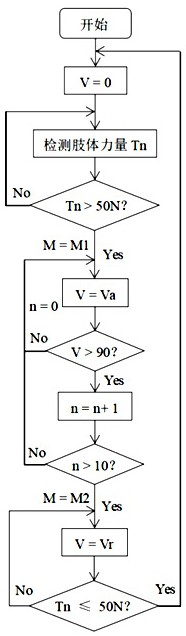
S4.1、上肢执行器和下肢执行器均保持静止,初始速度V
S4.2、助力模式M1下,若没有检测到肢体施力,则停止运动,恢复静止状态;若检测连续n个周期实时速度均超过限值,则进入抗阻模式M2;其中,实时速度V的取值为助力模式的速度值V
S4.3、抗阻模式M2下,若没有检测到肢体施力,则停止运动,恢复静止状态;否则持续执行抗阻模式,实时速度V的取值为抗阻模式的速度值V
优选地,前述设定值为50N,所述限值为90rad/min,可结合康复人员的实际情况或治疗师的主观需求对上述数值进行调整。
更优选地,前述n为10,也可根据训练需求,灵活设置该周期值。
再优选地,助力模式速度值为:
式(Ⅰ)中,Tn表示实时检测力,Ka表示助力等级,由用户设置,Kv为速度变化率,为固定参数,Tp为参考主动力量值,为固定参数。
进一步优选地,抗阻模式速度值为:
Vr=Vp+Tn*L/(Kr/r)/Kt (Ⅱ)
式(Ⅱ)中,Tn表示实时检测力;Kr表示抗阻等级,由用户设置,取值范围为[1,r],r表示最大抗阻等级,为固定参数;Vp表示抗阻模式基础速度设定值,L表示执行器臂长,Kt为速度变化率,为固定参数。
更进一步优选地,前述实时检测力T
本发明还公布了采用前述方法的主被动康复训练系统上下肢协同训练控制系统,包括:
训练模块:内置多个模式的训练模式;
肢体力量检测模块:实时检测操作者的四肢力量并反馈至控制模块;
控制模块:根据实时检测到的肢体力量进行模式切换或维持。
优选地,前述多个模式包括:静止模式、助力模式和抗阻模式。
具体地,前述静止模式下,康复训练机速度为0;所述助力模式下,康复训练机对康复人员施加正向作用力,提供运动助力;所述抗阻模式下,康复训练机对康复人员施加反向作用力,施加运动阻力。
本发明的有益之处在于:
(1)本发明综合市场上现有的四肢联动康复训练仪的特点和上下肢主被动康复训练系统的功能,提出一种上下肢协同训练控制系统和算法,在整个训练过程中上下肢执行器相对位置固定,上下肢联动能够更好地避免上下肢运动过程中的干涉问题,使该系统真正拥有四肢协同训练功能,能够在主被动康复训练系统中实现上肢带动下肢、健侧带动患侧、一肢带动三肢,实现加强较弱肌肉力量训练的康复训练目的;
(2)本发明的上下肢协同训练控制系统和算法为用户提供安全的主动运动,在不施力的情况下上下肢执行器均保持静止不动,不存在痉挛和受伤风险,通过用户自身的肢体带动运动,在保证患者训练安全的前提下,提供助力训练模式和抗阻训练模式,适应不同肢体状况的用户;
(3)相比于市场上主流的四肢联动康复训练仪的恒定主动力而言,本发明的控制系统和方法还可以在训练过程中提供助力模式和抗阻模式的智能切换,为用户提供更加科学完善的训练体验和训练质量。
附图说明
图1是本发明的主被动康复训练系统上下肢协同训练控制方法的控制逻辑图。
具体实施方式
以下结合附图和具体实施例对本发明作具体的介绍。
本发明的主被动康复训练系统上下肢协同训练控制方法,包括如下步骤:
S1、康复训练系统的上下肢执行器使能;
S2、调整康复训练系统的上肢执行器角度和下肢执行器角度相同;
S3、上肢执行器顺时针旋转,使上肢执行器角度超前下肢执行器90°;
S4、开始训练。
在训练前,上肢和下肢相对位置调整到位之后,上肢的运动和下肢的运动开始相互关联完全同步,单侧或单肢的运动会带动对侧和对肢的运动,这样做不仅强化了四肢运动协同性,而且避免了训练过程中肢体或执行器发生的干涉问题。
为了较好地理解和实施本发明,下面对该上下肢协同训练控制方法的具体训练过程进行具体说明,即步骤S4包括如下子步骤:
(1)准备训练,上肢执行器和下肢执行器均保持静止,初始速度V
(2)助力模式M1下,实时速度V(单位:rad/min)的取值即为助力模式的速度值V
其中,助力模式速度值:
式(Ⅰ)中,Tn表示实时检测力,Ka表示助力等级,由用户设置,Kv为速度变化率,为固定参数,Tp为参考主动力量值,为固定参数。
由上可见,助力模式速度值的调整依据助力等级和实时检测力,助力等级越大,速度的变化率越快,则助力运动越轻松;实时检测力越大,速度越快,但是速度的变化率会随着力的增大而变小。在运动过程中,通过速度变化,实现助力的体感调整,实现训练控制。
(3)抗阻模式M2下,实时速度V的取值即为抗阻模式的速度值V
其中,抗阻模式速度值:Vr=Vp+Tn*L/(Kr/r)/Kt (Ⅱ)
式(Ⅱ)中,Tn表示实时检测力;Kr表示抗阻等级,由用户设置,取值范围为[1,r],r表示最大抗阻等级,为固定参数;Vp表示抗阻模式基础速度设定值,L表示执行器臂长,Kt为速度变化率,为固定参数。
由上可见,抗阻模式速度值的调整依据抗阻等级和实时检测力,抗阻等级越高,速度的变化率越慢,抗阻运动越费力;实时检测力越大,速度越快。在运动过程中,通过速度变化,强化训练体验和训练效果,实现训练控制和调整。
其中,Tn表示实时检测力,Tn=max(T
综上,本发明的控制系统和控制方法能够实现上下肢协同训练,上下肢联动能够更好地避免上下肢运动过程中的干涉问题,使该系统真正拥有四肢协同训练功能,能够在主被动康复训练系统中实现上肢带动下肢、健侧带动患侧、一肢带动三肢,实现加强较弱肌肉力量训练的康复训练目的;为用户提供安全的主动运动,在不施力的情况下上下肢执行器均保持静止不动,不存在痉挛和受伤风险,通过用户自身的肢体带动运动,在保证患者训练安全的前提下,提供助力训练模式和抗阻训练模式,并能实现智能切换,由此适应不同肢体状况的用户,为用户提供更加科学完善的训练体验和训练质量。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
- 主被动康复训练系统上下肢协同训练控制方法和控制系统
- 上下肢智能主被动康复训练装置