一种基于微振传感器的架空输电线路舞动定位系统
文献发布时间:2023-06-19 09:55:50
技术领域
本发明属于电力检测技术领域,特别涉及一种基于微振传感器的架空输电线路舞动定位系统。
背景技术
在恶劣气候条件下,导线会发生低频(0.1-3Hz)、大幅度(可>10m)的舞动。导线舞动会使相邻垂串产生剧烈摆动。导线两段张力发生显著变化,导致金具损坏、导线断股、相间短路、杆塔倾斜或倒塌等严重事故。舞动是输电线路,尤其是超高压、大跨越输电线路的重大灾害之一。舞动风速范围一般为4-20m/s,且当主导风向与导线走向夹角>45°时,导线易产生舞动,且夹角越接近90,舞动的可能性越大。目前国内外采用的防舞方法,只能相应的减弱舞动,不能主动、准确地发现舞动并产生预警信号。
架空输电线路舞动监测主要有远程图像监控和舞动在线监测装置两种手段。远程图像监控得到的舞动图片通过在杆塔上装设摄像头,将线路舞动的场景拍摄下来,事后真实地还原和再现舞动过程,方便工作人员的观摩和分析研究。但该方法的存在明显缺点:图像帧速低,视频图像容易失真,功耗较大,对取能装置要求较高且造价比较昂贵,且容易受天气影响,在雨雪严重的条件下,摄像头可能无法采集到导线的影像;仅能实现对线路舞动的定性分析,不能为舞动机理分析和防舞装置的设计提供科学数据和基本资料。
传统的舞动监测通过在线路上布置大量的传感器来提高监测精度,对线路本身力学特性影响较大,本发明提出一种基于微振传感器的架空输电线路舞动定位系统,采用MEMS惯性传感器系统采集导线的状态信息,只使用少量传感器的测量数据构成一组观测值,运用算法计算全线路的舞动数据,提高检测的准确性,并通过物联网技术确定故障位置,以便相关工作人员及时处理解决。
发明内容
本发明提供一种基于微振传感器的架空输电线路舞动定位系统,能够快速准确的检测出架空输电线路是否发生舞动及具体位置。
本发明具体为一种基于微振传感器的架空输电线路舞动定位系统,所述架空输电线路舞动定位系统包括舞动监测装置、通信主系统和上位机终端,所述舞动监测装置与所述通信主系统、所述上位机终端顺序连接;所述舞动监测装置负责所述架空输电线路舞动数据的采集和信息的解算、打包发送,经过所述通信主系统初步判断是否舞动异常,若是控制所述舞动监测装置采集所述架空输电线路位置信息,再发送至所述上位机终端,并及时报警。
所述舞动监测装置包括传感器采集模块、线路信息采集模块、信号调理模块、第一控制模块、第一通信模块和电源模块,所述传感器采集模块与所述信号调理模块、所述第一控制模块、所述第一通信模块顺序连接,所述电源模块分别与所述传感器采集模块、所述信号调理模块、所述第一控制模块、所述第一通信模块相连接;所述线路信息采集模块与所述第一控制模块相连接。
所述传感器采集模块采用MEMS惯性传感器系统,所述MEMS惯性传感器系统包括第一陀螺仪、第二陀螺仪、第三陀螺仪、第一加速度传感器、第二加速度传感器、第三加速度传感器,所述第一陀螺仪、所述第二陀螺仪、所述第三陀螺仪分别独立检测X、Y、Z轴的角速度,所述第一加速度传感器、所述第二加速度传感器、所述第三加速度传感器分别独立检测X、Y、Z轴的偏差度。
所述线路信息采集模块包括RFID标签和RFID标签读写器,所述RFID标签包含所述架空输电线路的相关信息,并对所述架空输电线路进行区域编号;RFID标签读写器通过射频信号自动识别所述RFID标签。
所述通信主系统包括第二控制模块、第二通信模块,所述第二控制模块分别与所述第一通信模块、所述第二通信模块相连接,所述第二通信模块与所述上位机终端相连接;所述通信主系统负责给各个所述舞动监测装置提供同步采集信号,根据所述传感器采集模块采集的信息计算所述架空输电线路舞动的位移和速度,并判断所述位移、所述速度是否大于参考值,若是,调取所述架空输电线路编号,将接收到的所述架空输电线路位移数据、位置信息发送给所述上位机终端。
所述上位机终端主要负责对位移数据进行算法处理,拟合导线舞动轨迹并保存。
所述第一控制模块、所述第二控制模块采用STM32微控制器进行监测控制和通信控制。
所述第一通信模块、所述第二通信模块采用4G移动通信技术进行信息传输。
与现有技术相比,有益效果是:所述架空输电线路舞动定位系统采用MEMS惯性传感器系统采集架空输电线路X、Y、Z轴的角速度和偏差度,减少了传感器的数量,提高检测的准确性,并通过物联网技术确定故障位置,以便相关工作人员及时处理解决。
附图说明
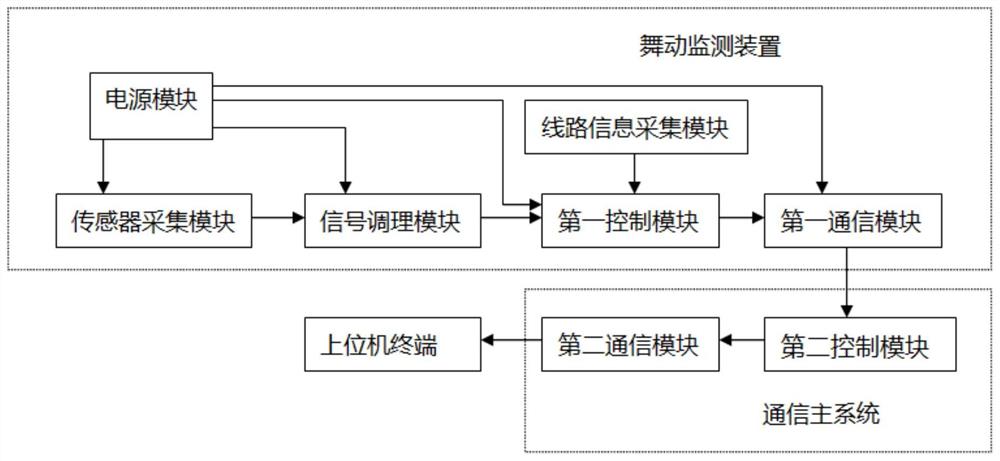
图1为本发明一种基于微振传感器的架空输电线路舞动定位系统的结构示意图。
具体实施方式
下面结合附图对本发明一种基于微振传感器的架空输电线路舞动定位系统的具体实施方式做详细阐述。
如图1所示,本发明的架空输电线路舞动定位系统包括舞动监测装置、通信主系统和上位机终端,舞动监测装置与通信主系统、上位机终端顺序连接,舞动监测装置负责架空输电线路舞动数据的采集和信息的解算、打包发送,经过通信主系统初步判断是否舞动异常,若是控制所述舞动监测装置采集架空输电线路位置信息,再发送至上位机终端,并及时报警。
舞动监测装置包括传感器采集模块、线路信息采集模块、信号调理模块、第一控制模块、第一通信模块和电源模块,传感器采集模块与信号调理模块、第一控制模块、第一通信模块顺序连接,电源模块分别与传感器采集模块、信号调理模块、第一控制模块、第一通信模块相连接;线路信息采集模块与所述第一控制模块相连接。
所述传感器采集模块采用MEMS惯性传感器系统,包括第一陀螺仪、第二陀螺仪、第三陀螺仪、第一加速度传感器、第二加速度传感器、第三加速度传感器,第一陀螺仪、第二陀螺仪、第三陀螺仪分别独立检测X、Y、Z轴的角速度,第一加速度传感器、第二加速度传感器、第三加速度传感器分别独立检测X、Y、Z轴的偏差度。
陀螺仪的角速度测量范围最高达±2000度每秒,具有良好的动态响应特性,能够满足多个加速度传感器同时采集的要求。
线路信息采集模块包括RFID标签和RFID标签读写器,RFID标签包含架空输电线路的相关信息,并对架空输电线路进行区域编号;RFID标签读写器通过射频信号自动识别RFID标签。
所通信主系统包括第二控制模块、第二通信模块,第二控制模块分别与第一通信模块、第二通信模块相连接,第二通信模块与上位机终端相连接;通信主系统负责给各个舞动监测装置提供同步采集信号,根据传感器采集模块采集的信息计算架空输电线路舞动的位移和速度,并判断位移、速度是否大于参考值,若是,调取架空输电线路编号,将接收到的架空输电线路位移数据、位置信息发送给上位机终端。
架空输电线路在X轴舞动的位移为S
上位机终端主要负责对位移数据进行算法处理,拟合导线舞动轨迹并保存。
第一控制模块、第二控制模块采用STM32微控制器进行监测控制和通信控制。
第一通信模块、第二通信模块采用4G移动通信技术进行信息传输。
最后应该说明的是,结合上述实施例仅说明本发明的技术方案而非对其限制。所属领域的普通技术人员应当理解到,本领域技术人员可以对本发明的具体实施方式进行修改或者等同替换,但这些修改或变更均在申请待批的权利要求保护范围之中。
- 一种基于微振传感器的架空输电线路舞动定位系统
- 基于微惯性测量组合的输电导线舞动定位系统及定位方法