一种用于乘用车辆的货车盲区提示方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及一种用于乘用车辆的货车盲区提示方法,属于汽车自动化控制的技术领域。
背景技术
目前,存在周围行驶环境识别及可视化技术,该技术一般用于具备L2及以上自动驾驶能力的车辆,如特斯拉配备Autopilot系统的车型。该技术可以识别并展示周围的卡车、SUV、摩托车及行人;除了他们的类型,也能展示他们与我方车辆的相对位置关系。
但是,针对卡车这一特定的类型,上述的技术并不能将卡车的盲区标注出来,用于提示我方驾驶人员,以进行合理的规避,提高我方安全系数。
发明内容
本发明所要解决的技术问题在于克服现有技术仅仅显示我方车辆周围的卡车存在情况,无法将卡车的盲区标注出来和提示,使得车辆行驶在卡车周围存在安全隐患,提供一种用于乘用车辆的货车盲区提示方法,实现卡车盲区的判断和提示,提示我方驾驶人员,远离或尽快驶离卡车盲区,增加乘用车辆的安全性。
本发明具体采用以下技术方案解决上述技术问题:
一种用于乘用车辆的货车盲区提示方法,包括以下步骤:
步骤1、获取乘用车辆周围行驶环境信息,判断乘用车辆周边是否存在卡车,在判断为存在卡车时,获取目标卡车与乘用车辆的位置关系,以及该目标卡车朝向;
步骤2、根据卡车的一般盲区区域、步骤1获取的目标卡车与乘用车辆的位置关系、目标卡车朝向,判断乘用车辆是否在目标卡车的盲区中,在判断为乘用车辆在目标卡车的盲区中时,通过乘用车辆的车载多媒体系统提示驾驶人员乘用车辆当前处于目标卡车盲区。
进一步地,作为本发明的一种优选技术方案,所述步骤1中通过车载摄像头获取乘用车辆周围图像,并根据图像识别算法识别乘用车辆周边是否存在卡车。
进一步地,作为本发明的一种优选技术方案,所述步骤1中通过激光雷达获取乘用车辆周围点云图,根据聚类算法及模式识别算法识别乘用车辆周边是否存在卡车。
进一步地,作为本发明的一种优选技术方案,所述步骤1还包括在判断为存在多辆卡车时,分别将各卡车作为目标卡车,以获取目标卡车与乘用车辆的位置关系。
进一步地,作为本发明的一种优选技术方案,所述步骤2中车载多媒体系统采用中控显示屏和或语音播放器。
本发明采用上述技术方案,能产生如下技术效果:
本发明的方法,可以结合卡车的一般盲区区域、目标卡车与乘用车辆的位置关系、目标卡车朝向,判断出乘用车辆是否位于目标卡车的盲区,提示驾驶人员以便规避风险因素,远离或尽快驶离卡车盲区;或提示避免在卡车右侧车道并道到卡车所在车道的操作,增加我方车辆安全性。将驾驶技巧自动化,降低对人工判断的依赖,提示我方车辆驾驶人员主动驶离卡车盲区,提高乘用车安全;有效减轻驾驶人员驾驶过程中的压力,提高行车安全,实现自动化提示。
附图说明
图1为现有技术中特斯拉Autopilot的周围环境识别及显示示意图。
图2为本发明中车载摄像头获取乘用车辆周围图像的示意图。
图3为本发明中通过激光雷达获取乘用车辆周围点云图的示意图。
图4为本发明中卡车的一般盲区区域划分的示意图。
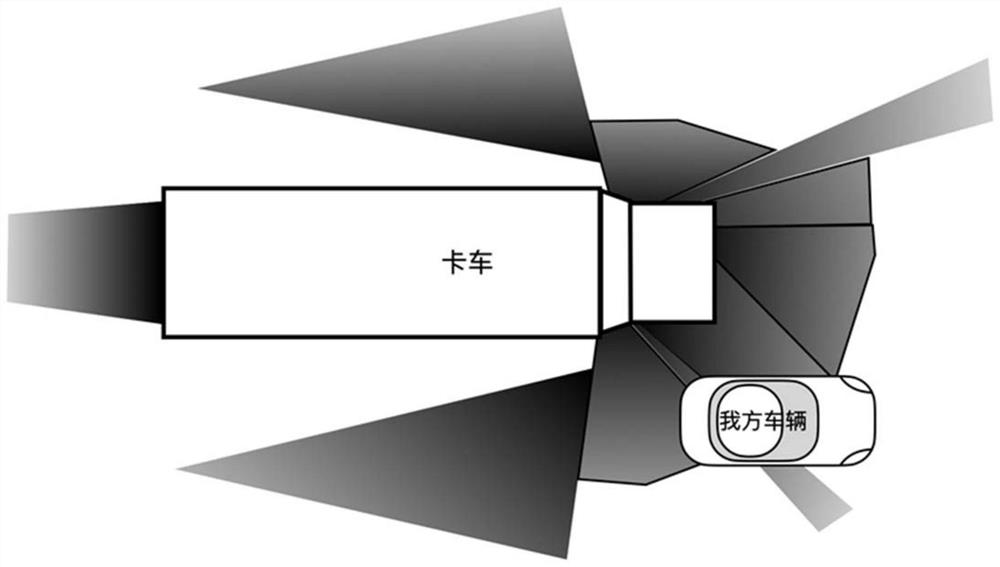
图5为发明中判断乘用车辆处于卡车盲区内的示意图。
具体实施方式
下面结合说明书附图对本发明的实施方式进行描述。
本发明涉及一种用于乘用车辆的货车盲区提示方法,该方法主要包括以下步骤:
步骤1、获取乘用车辆周围行驶环境信息,判断乘用车辆周边是否存在卡车,在判断为存在卡车时,获取目标卡车与乘用车辆的位置关系,以及该目标卡车朝向;否则不进行判断操作,具体如下:
步骤1.1a:本发明可以通过车载摄像头,获取我方的乘用车辆周围图像,根据图像识别算法识别我方的乘用车辆周边是否存在卡车,如果存在,则将卡车作为目标卡车,根据目标卡车在该车载摄像头拍摄画面中的位置、尺寸,匹配上该车载摄像头原始朝向数据,如图2所示,即可获得该目标卡车与我方乘用车辆的位置关系。优选地,在判断为存在多辆卡车时,分别将各卡车作为目标卡车,以获取目标卡车与乘用车辆的位置关系。
步骤1.1b:或者通过激光雷达获取我方乘用车辆周围点云图,根据聚类算法及模式识别算法,识别我方的乘用车辆周边是否存在卡车,如果存在,则将卡车作为目标卡车,根据激光雷达装车朝向及初始标定,即可获得该目标卡车与我方车辆的位置关系,如图3所示。
步骤1.2:根据步骤1.1a中获得的乘用车辆周围图像,可知当前拍摄到的为卡车的车头还是车尾还是车侧,根据该信息可知卡车的朝向;或者根据1.1b中获得的卡车点云图,根据点云图中卡车的形态,亦可获得卡车的朝向。
步骤2、根据卡车的一般盲区区域、步骤1获取的目标卡车与乘用车辆的位置关系、目标卡车朝向,判断乘用车辆是否在目标卡车的盲区中。
卡车的一般盲区区域划分,如图4所示,可分为A、B、C、D、E等区域,ABC区域因卡车较高靠近车体下方为盲区,D区则为后视镜视野范围以外的盲区,E区为A柱遮挡形成的盲区,本发明中卡车盲区的区域划分不限于该种,其他方式划分同样可以实现。
根据卡车盲区区域、乘用车辆的位置关系和目标卡车的朝向,可以判断出乘用车辆位于卡车的方位和距离,当乘用车辆行驶在上述的卡车盲区区域任意一个内时,则判断乘用车辆处于盲区内,否则判断不在盲区内,如图5所示,实施例显示为卡车在我方乘用车辆左后方,匹配卡车盲区区域可得乘用车辆在盲区中,存在危险。在判断为乘用车辆在目标卡车的盲区中时,通过乘用车辆的车载多媒体系统提示驾驶人员乘用车辆当前处于目标卡车盲区。
优选地,所述步车载多媒体系统采用中控显示屏和或语音播放器提示驾驶人员乘用车辆当前处于目标卡车盲区,当前环境中间的哪辆目标卡车对我方的乘用车辆可能存在风险。
因此,本发明的方法可以结合卡车的一般盲区区域、目标卡车与乘用车辆的位置关系、目标卡车朝向,判断出乘用车辆是否位于目标卡车的盲区,提示驾驶人员以便规避风险因素,远离或尽快驶离卡车盲区,将驾驶技巧自动化,降低对人工判断的依赖,提示我方车辆驾驶人员主动驶离卡车盲区,有效提高乘用车安全,实现自动化提示。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
- 一种用于乘用车辆的货车盲区提示方法
- 应用于乘用车盲区智能辅助控制方法